
 Périphériques technologiques
IA
Une discussion approfondie sur les algorithmes de perception visuelle 2D et 3D dans la conduite autonome
Périphériques technologiques
IA
Une discussion approfondie sur les algorithmes de perception visuelle 2D et 3D dans la conduite autonome
Une discussion approfondie sur les algorithmes de perception visuelle 2D et 3D dans la conduite autonome

La perception de l'environnement est le premier maillon de la conduite autonome et le lien entre le véhicule et l'environnement. La performance globale d’un système de conduite autonome dépend en grande partie de la qualité du système de perception. Actuellement, il existe deux voies technologiques principales pour la technologie de détection environnementale :
① Une solution de fusion multi-capteurs basée sur la vision, le représentant typique est Tesla
② Une solution technologique dominée par le lidar et assistée par d'autres capteurs, les représentants typiques incluent ; Google, Baidu, etc.
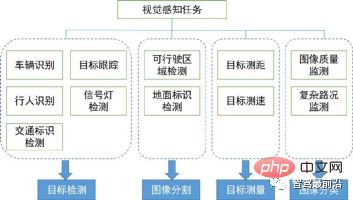
Nous présenterons les principaux algorithmes de perception visuelle dans la perception environnementale. Sa couverture de tâches et ses domaines techniques sont présentés dans la figure ci-dessous. Nous examinons ci-dessous le contexte et l’orientation des algorithmes de perception visuelle 2D et 3D.
Perception visuelle 2D
Dans cette section, nous introduisons d'abord des algorithmes de perception visuelle 2D à partir de plusieurs tâches largement utilisées en conduite autonome, notamment la détection et le suivi de cibles 2D basés sur des images ou des vidéos, ainsi que la sémantique de segmentation de scènes 2D. Ces dernières années, l'apprentissage profond a pénétré divers domaines de la perception visuelle et a obtenu de bons résultats. Nous avons donc trié certains algorithmes classiques d'apprentissage profond.
1. Détection de cible
1.1 Détection en deux étapes
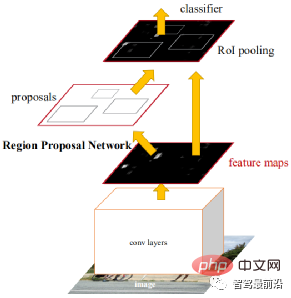
Deux étapes font référence à la manière de réaliser la détection. Il existe deux processus, l'un consiste à extraire la zone de l'objet ; la zone avec CNN, par conséquent, « en deux étapes » est également appelée détection de cible basée sur la proposition de région (proposition de région). Les algorithmes représentatifs incluent la série R-CNN (R-CNN, Fast R-CNN, Faster R-CNN), etc. Faster R-CNN est le premier réseau de détection de bout en bout. Dans la première étape, un réseau candidat de région (RPN) est utilisé pour générer des trames candidates basées sur la carte de caractéristiques, et ROIPooling est utilisé pour aligner la taille des caractéristiques candidates. Dans la deuxième étape, une couche entièrement connectée est utilisée pour le raffinement ; classification et régression.
L'idée d'Anchor est proposée ici pour réduire la difficulté de calcul et augmenter la vitesse. Chaque position de la carte de caractéristiques générera des ancres de différentes tailles et formats d'image, qui sont utilisées comme référence pour la régression du cadre d'objet. L'introduction d'Anchor permet à la tâche de régression de ne traiter que des changements relativement mineurs, de sorte que l'apprentissage du réseau sera plus facile. La figure ci-dessous est le schéma de structure du réseau de Faster R-CNN.
La première étape de CascadeRCNN est exactement la même que Faster R-CNN, et la deuxième étape utilise plusieurs couches RoiHead pour la mise en cascade. Les travaux ultérieurs tournent principalement autour de quelques améliorations du réseau mentionné ci-dessus ou d'un mélange de travaux antérieurs, avec quelques améliorations révolutionnaires.
1.2 Détection en une seule étape
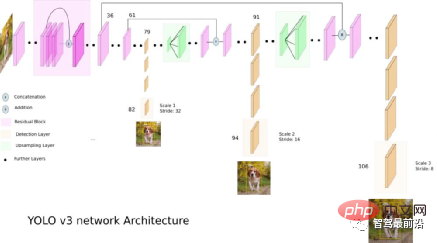
Par rapport à l'algorithme en deux étapes, l'algorithme en une seule étape n'a besoin d'extraire les caractéristiques qu'une seule fois pour atteindre la détection de la cible. Son algorithme de vitesse est plus rapide et sa précision générale est légèrement inférieure. Le travail pionnier de ce type d'algorithme a été YOLO, qui a ensuite été amélioré par SSD et Retinanet. L'équipe qui a proposé YOLO a intégré ces astuces qui aident à améliorer les performances dans l'algorithme YOLO, et a ensuite proposé 4 versions améliorées YOLOv2 ~ YOLOv5. Bien que la précision de la prédiction ne soit pas aussi bonne que celle de l'algorithme de détection de cible en deux étapes, YOLO est devenu le courant dominant de l'industrie en raison de sa vitesse d'exécution plus rapide. La figure ci-dessous est le schéma de structure du réseau de YOLO v3.
1.3 Détection sans ancre (pas de détection d'ancre)
Ce type de méthode représente généralement l'objet comme quelques points clés, et CNN est utilisé pour renvoyer les positions de ces points clés. Le point clé peut être le point central (CenterNet), le point d'angle (CornerNet) ou le point représentatif (RepPoints) du cadre de l'objet. CenterNet convertit le problème de détection de cible en un problème de prédiction du point central, c'est-à-dire en utilisant le point central de la cible pour représenter la cible et en obtenant le cadre rectangulaire de la cible en prédisant le décalage, la largeur et la hauteur du point central de la cible. La Heatmap représente les informations de classification et chaque catégorie générera une Heatmap distincte. Pour chaque Heatmap, lorsqu'une certaine coordonnée contient le point central de la cible, un point clé sera généré au niveau de la cible. Nous utilisons un cercle gaussien pour représenter l'ensemble du point clé. La figure suivante montre les détails spécifiques.

RepPoints propose de représenter l'objet comme un ensemble de points représentatif et de s'adapter aux changements de forme de l'objet par convolution déformable. L'ensemble de points est finalement converti en un cadre d'objet et utilisé pour calculer la différence par rapport à l'annotation manuelle.
1.4 Détection de transformateur
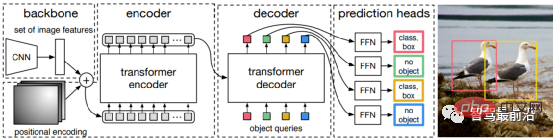
Qu'il s'agisse d'une détection de cible en une ou deux étapes, qu'Anchor soit utilisé ou non, le mécanisme d'attention n'est pas bien utilisé. En réponse à cette situation, Relation Net et DETR utilisent Transformer pour introduire le mécanisme d'attention dans le domaine de la détection de cibles. Relation Net utilise Transformer pour modéliser la relation entre différentes cibles, incorpore les informations sur les relations dans les fonctionnalités et réalise l'amélioration des fonctionnalités. DETR propose une nouvelle architecture de détection de cible basée sur Transformer, ouvrant une nouvelle ère de détection de cible. La figure suivante est le processus algorithmique de DETR. Tout d'abord, CNN est utilisé pour extraire les caractéristiques de l'image, puis Transformer est utilisé pour modéliser la relation spatiale globale. .Enfin, nous obtenons La sortie de est mise en correspondance avec une annotation manuelle via un algorithme de correspondance de graphiques bipartis.
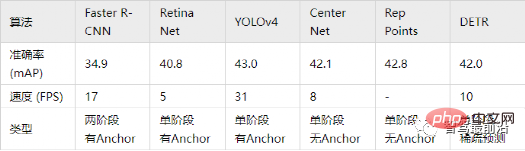
La précision dans le tableau ci-dessous utilise mAP sur la base de données MS COCO comme indicateur, tandis que la vitesse est mesurée par FPS. Par rapport à certains des algorithmes ci-dessus, il existe de nombreux choix différents dans la conception structurelle du réseau. (telles que des tailles d'entrée différentes, des réseaux backbone différents, etc.), les plates-formes matérielles de mise en œuvre de chaque algorithme sont également différentes, de sorte que la précision et la vitesse ne sont pas complètement comparables. Seul un résultat approximatif est répertorié ici pour votre référence.
2. Suivi des cibles
Dans les applications de conduite autonome, l'entrée est constituée de données vidéo, et de nombreuses cibles doivent être prises en compte, telles que les véhicules, les piétons, les vélos, etc. Il s’agit donc d’une tâche typique de suivi d’objets multiples (MOT). Pour les tâches MOT, le framework le plus populaire actuellement est le suivi par détection, et son processus est le suivant :
① Le détecteur de cible obtient la sortie de l'image cible sur une seule image image
② Extrait les caractéristiques de chaque cible détectée ; , Comprend généralement des caractéristiques visuelles et des caractéristiques de mouvement ;
③ Calculer la similarité entre les détections de cibles des images adjacentes en fonction des caractéristiques pour déterminer la probabilité qu'elles proviennent de la même cible
④ Faire correspondre les détections de cibles des images adjacentes, attribuer des objets ; de la même cible, le même identifiant.
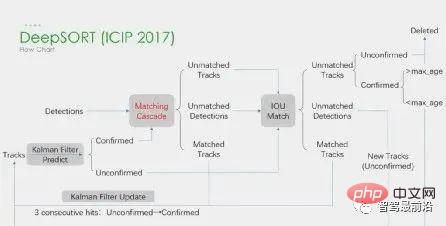
Le deep learning est appliqué dans les quatre étapes ci-dessus, mais les deux premières étapes sont les principales. À l’étape 1, l’application de l’apprentissage profond consiste principalement à fournir des détecteurs d’objets de haute qualité, c’est pourquoi des méthodes plus précises sont généralement choisies. SORT est une méthode de détection de cible basée sur Faster R-CNN et utilise l'algorithme de filtre de Kalman + l'algorithme hongrois pour améliorer considérablement la vitesse de suivi multi-cibles et atteindre la précision de SOTA. Elle est également largement utilisée dans les applications pratiques. algorithme. À l’étape 2, l’application du deep learning repose principalement sur l’utilisation de CNN pour extraire les caractéristiques visuelles des objets. La plus grande fonctionnalité de DeepSORT est d'ajouter des informations d'apparence et d'emprunter le module ReID pour extraire les fonctionnalités d'apprentissage en profondeur, réduisant ainsi le nombre de commutateurs d'identification. L'organigramme global est le suivant :
De plus, il existe également un cadre de détection et de suivi simultanés. Tel que le CenterTrack représentatif, issu de l'algorithme de détection sans ancre à une étape CenterNet introduit auparavant. Par rapport à CenterNet, CenterTrack ajoute l'image RVB de l'image précédente et la Heatmap du centre de l'objet comme entrées supplémentaires, et ajoute une branche Offset pour l'association entre les images précédentes et suivantes. Par rapport au suivi par détection en plusieurs étapes, CenterTrack utilise un réseau pour mettre en œuvre les étapes de détection et de correspondance, améliorant ainsi la vitesse du MOT.
3. Segmentation sémantique
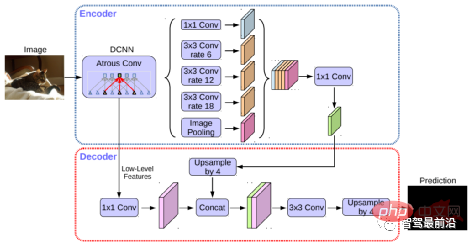
La segmentation sémantique est utilisée à la fois dans les tâches de détection de lignes de voie et de détection de zones roulables de la conduite autonome. Les algorithmes représentatifs incluent les séries FCN, U-Net, DeepLab, etc. DeepLab utilise une convolution dilatée et une structure ASPP (Atrous Spatial Pyramid Pooling) pour effectuer un traitement multi-échelle sur l'image d'entrée. Enfin, le champ aléatoire conditionnel (CRF) couramment utilisé dans les méthodes de segmentation sémantique traditionnelles est utilisé pour optimiser les résultats de segmentation. La figure ci-dessous représente la structure du réseau de DeepLab v3+.
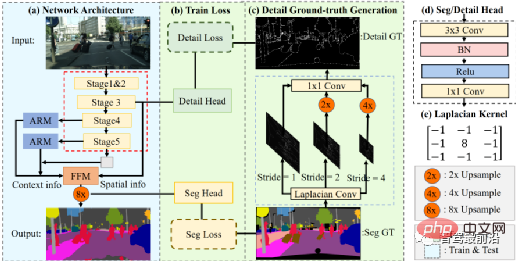
L'algorithme STDC a adopté ces dernières années une structure similaire à l'algorithme FCN, éliminant la structure complexe du décodeur de l'algorithme U-Net. Mais en même temps, dans le processus de sous-échantillonnage du réseau, le module ARM est utilisé pour fusionner en continu les informations provenant de cartes de caractéristiques de différentes couches, évitant ainsi les défauts de l'algorithme FCN qui ne prend en compte que les relations entre pixels uniques. On peut dire que l'algorithme STDC atteint un bon équilibre entre vitesse et précision, et qu'il peut répondre aux exigences en temps réel du système de conduite autonome. Le flux de l'algorithme est présenté dans la figure ci-dessous.
Perception visuelle 3D
Dans cette section, nous présenterons la perception de la scène 3D qui est essentielle dans la conduite autonome. Étant donné que les informations sur la profondeur, la taille tridimensionnelle de la cible, etc. ne peuvent pas être obtenues en perception 2D, ces informations sont la clé permettant au système de conduite autonome de porter des jugements corrects sur l'environnement. Le moyen le plus direct d’obtenir des informations 3D consiste à utiliser le LiDAR. Cependant, le LiDAR présente également des inconvénients, tels qu'un coût plus élevé, des difficultés de production en série de produits de qualité automobile, un impact plus important des conditions météorologiques, etc. Par conséquent, la perception 3D basée uniquement sur des caméras reste une direction de recherche très significative et précieuse. Ensuite, nous trierons quelques algorithmes de perception 3D basés sur les monoculaires et les binoculaires.
1. Perception 3D monoculaire
La perception de l'environnement 3D basée sur des images d'une seule caméra est un problème mal posé, mais il peut être résolu grâce à des hypothèses géométriques (telles que des pixels au sol), des connaissances préalables ou des informations supplémentaires. (comme l'estimation de la profondeur) pour aider à résoudre le problème. Cette fois, nous présenterons les algorithmes pertinents à partir des deux tâches de base de la conduite autonome (détection de cible 3D et estimation de la profondeur).
1.1 Détection de cibles 3D
Conversion de représentation (pseudo-lidar) : La détection d'autres véhicules environnants par des capteurs visuels rencontre généralement des problèmes tels que l'occlusion et l'incapacité de mesurer les distances. La vue en perspective peut être convertie en une vue en perspective. vue à vol d'oiseau expresse. Deux méthodes de transformation sont présentées ici. La première est la cartographie en perspective inverse (IPM), qui suppose que tous les pixels sont au sol et que les paramètres externes de la caméra sont précis. À ce stade, la transformation homographique peut être utilisée pour convertir l'image en BEV, puis une méthode basée sur la cartographie en perspective inverse (IPM). Le réseau YOLO est utilisé pour détecter le cadre au sol de la cible. La seconde est Orthogonal Feature Transform (OFT), qui utilise ResNet-18 pour extraire les caractéristiques de l'image en perspective. Des caractéristiques basées sur des voxels sont ensuite générées par accumulation de caractéristiques basées sur des images sur les régions de voxels projetées.
Les caractéristiques du voxel sont ensuite pliées verticalement pour produire des caractéristiques de plan de sol orthogonales. Enfin, un autre réseau descendant similaire à ResNet est utilisé pour la détection d'objets 3D. Ces méthodes ne conviennent qu’aux véhicules et piétons proches du sol. Pour les cibles non terrestres telles que les panneaux de signalisation et les feux de circulation, des pseudo-nuages de points peuvent être générés via une estimation de la profondeur pour la détection 3D. Le pseudo-LiDAR utilise d'abord les résultats de l'estimation de la profondeur pour générer des nuages de points, puis applique directement le détecteur de cible 3D basé sur le lidar pour générer un cadre cible 3D. Le flux de l'algorithme est présenté dans la figure ci-dessous,

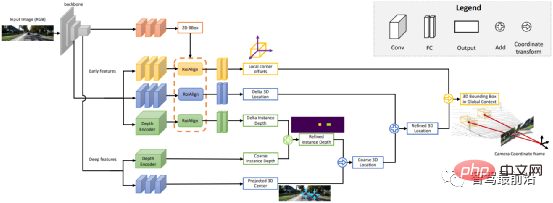
Points clés. et modèles 3D : à détecter. La taille et la forme des cibles telles que les véhicules et les piétons sont relativement fixes et connues, ce qui peut être utilisé comme connaissance préalable pour estimer les informations 3D de la cible. DeepMANTA est l’un des travaux pionniers dans cette direction. Premièrement, certains algorithmes de détection de cible tels que Faster RNN sont utilisés pour obtenir le cadre cible 2D et également détecter les points clés de la cible. Ensuite, ces cadres cibles 2D et points clés sont mis en correspondance avec divers modèles CAO de véhicules 3D dans la base de données, et le modèle présentant la plus grande similarité est sélectionné comme résultat de la détection de cible 3D. MonoGRNet propose de diviser la détection de cible 3D monoculaire en quatre étapes : détection de cible 2D, estimation de la profondeur au niveau de l'instance, estimation du centre 3D projeté et régression des coins locaux. Le flux de l'algorithme est présenté dans la figure ci-dessous. Ce type de procédé suppose que la cible présente un modèle de forme relativement fixe, ce qui est généralement satisfaisant pour les véhicules, mais relativement difficile pour les piétons.
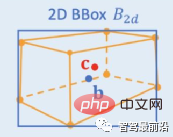
Contraintes géométriques 2D/3D : régressez la projection du centre 3D et de la profondeur grossière de l'instance et utilisez les deux pour estimer une position 3D grossière. Le travail pionnier est Deep3DBox, qui utilise pour la première fois les caractéristiques de l'image dans une zone cible 2D pour estimer la taille et l'orientation de la cible. Ensuite, la position 3D du point central est résolue via une contrainte géométrique 2D/3D. Cette contrainte est que la projection du cadre cible 3D sur l'image est étroitement entourée par le cadre cible 2D, c'est-à-dire qu'au moins un point de coin du cadre cible 3D peut être trouvé de chaque côté du cadre cible 2D. Grâce à la taille et à l'orientation prédites précédemment, combinées aux paramètres d'étalonnage de la caméra, la position 3D du point central peut être calculée. Les contraintes géométriques entre les zones cibles 2D et 3D sont illustrées dans la figure ci-dessous. Shift R-CNN combine la boîte cible 2D obtenue précédemment, la boîte cible 3D et les paramètres de la caméra en tant qu'entrée basée sur Deep3DBox, et utilise un réseau entièrement connecté pour prédire une position 3D plus précise.
Générer directement 3DBox : cette méthode part de boîtes candidates cibles 3D denses et note toutes les boîtes candidates en fonction des caractéristiques de l'image 2D. La boîte candidate avec un score élevé est le résultat final. Un peu similaire à la méthode traditionnelle de fenêtre coulissante dans la détection de cibles. L'algorithme représentatif Mono3D génère d'abord des boîtes candidates 3D denses en fonction de la position antérieure de la cible (la coordonnée z est au sol) et de sa taille. Une fois que ces images candidates 3D sont projetées sur les coordonnées de l'image, elles sont notées en intégrant les caractéristiques sur l'image 2D, puis un deuxième cycle de notation est effectué via CNN pour obtenir l'image cible 3D finale.
M3D-RPN est une méthode basée sur l'ancrage qui définit les ancres 2D et 3D. L'ancre 2D est obtenue grâce à un échantillonnage dense sur l'image, et l'ancre 3D est déterminée grâce à la connaissance préalable des données de l'ensemble d'entraînement (telles que la moyenne de la taille réelle de la cible). M3D-RPN utilise également à la fois la convolution standard et la convolution Depth-Aware. Le premier a une invariance spatiale et le second divise les lignes (coordonnées Y) de l'image en plusieurs groupes. Chaque groupe correspond à une profondeur de scène différente et est traité par différents noyaux de convolution. Les méthodes d’échantillonnage dense ci-dessus nécessitent beaucoup de calculs. SS3D utilise une détection en une seule étape plus efficace, comprenant un CNN pour générer des représentations redondantes de chaque objet pertinent dans l'image et les estimations d'incertitude correspondantes, ainsi qu'un optimiseur de boîte englobante 3D. FCOS3D est également une méthode de détection en une seule étape. La cible de régression ajoute un centre 2,5D supplémentaire (X, Y, Profondeur) obtenu en projetant le centre du cadre cible 3D sur l'image 2D.
1.2 Estimation de la profondeur
Qu'il s'agisse de la détection de cible 3D mentionnée ci-dessus ou d'une autre tâche importante de segmentation perception-sémantique de la conduite autonome, s'étendant de la 2D à la 3D, les deux sont plus ou moins appliquées à des informations de profondeur clairsemées ou denses. . L'importance de l'estimation de la profondeur monoculaire va de soi. Son entrée est une image et la sortie est une image de la même taille constituée de la valeur de profondeur de la scène correspondant à chaque pixel. L'entrée peut également être une séquence vidéo, utilisant des informations supplémentaires apportées par le mouvement de la caméra ou de l'objet pour améliorer la précision de l'estimation de la profondeur. Par rapport à l’apprentissage supervisé, la méthode non supervisée d’estimation de la profondeur monoculaire ne nécessite pas la construction d’un ensemble de données de vérité terrain complexe et est moins difficile à mettre en œuvre. Les méthodes non supervisées d’estimation de profondeur monoculaire peuvent être divisées en deux types : basées sur des séquences vidéo monoculaires et basées sur des paires d’images stéréo synchronisées.
Le premier repose sur l'hypothèse de caméras en mouvement et de scènes statiques. Dans cette dernière méthode, Garg et al. Sur cette base, Godard et al. est constamment perdu, affectant le traitement des détails en profondeur et la clarté des bords.
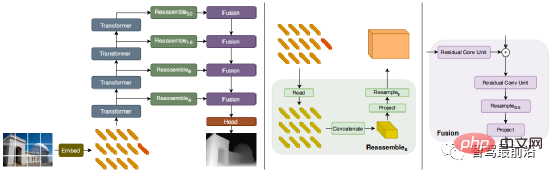
Pour atténuer ce problème, Godard et al. ont introduit une perte multi-échelle pleine résolution, qui réduit efficacement les trous noirs et les artefacts de réplication de texture dans les zones à faible texture. Cependant, cette amélioration de la précision reste encore limitée. Récemment, certains modèles basés sur Transformer ont émergé en continu, visant à obtenir un champ récepteur global à toutes les étapes, ce qui est également très approprié pour les tâches intensives d'estimation de profondeur. Dans le DPT supervisé, il est proposé d'utiliser un transformateur et une structure multi-échelle pour assurer simultanément la précision locale et la cohérence globale de la prédiction. La figure suivante est le diagramme de structure du réseau.
2. Perception binoculaire 3D
La vision binoculaire peut résoudre l'ambiguïté causée par la transformation de perspective, elle peut donc théoriquement améliorer la précision de la perception 3D. Cependant, le système binoculaire présente des exigences relativement élevées en termes de matériel et de logiciel. En termes de matériel, deux caméras enregistrées avec précision sont nécessaires, et l'exactitude de l'enregistrement doit être garantie pendant le fonctionnement du véhicule. En termes de logiciel, l'algorithme doit traiter les données de deux caméras en même temps. La complexité des calculs est élevée et les performances en temps réel de l'algorithme sont difficiles à garantir. Par rapport au monoculaire, le travail binoculaire est relativement moindre. Ensuite, nous donnerons également une brève introduction des deux aspects de la détection de cibles 3D et de l'estimation de la profondeur.
2.1 Détection de cible 3D
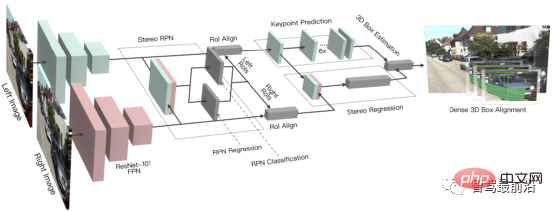
3DOP est une méthode de détection en deux étapes, qui est une extension de la méthode Fast R-CNN dans le domaine 3D. Tout d'abord, les images binoculaires sont utilisées pour générer une carte de profondeur. La carte de profondeur est convertie en un nuage de points puis quantifiée en une structure de données en grille. Celle-ci est ensuite utilisée comme entrée pour générer une image candidate pour la cible 3D. Semblables au pseudo-LiDAR introduit précédemment, les cartes de profondeur denses (à partir de LiDAR monoculaires, binoculaires ou même à faible nombre de lignes) sont converties en nuages de points, puis des algorithmes dans le domaine de la détection de cibles par nuages de points sont appliqués. DSGN utilise la correspondance stéréo pour construire des volumes de numérisation planaires et les convertit en géométrie 3D afin de coder la géométrie 3D et les informations sémantiques. Il s'agit d'un cadre de bout en bout qui peut extraire des fonctionnalités au niveau des pixels pour une correspondance stéréo et des fonctionnalités avancées de reconnaissance d'objets. , et peut simultanément estimer la profondeur de la scène et détecter des objets 3D. Stereo R-CNN étend Faster R-CNN pour une entrée stéréo afin de détecter et de corréler simultanément les objets dans les vues gauche et droite. Une branche supplémentaire est ajoutée après RPN pour prédire les points clés, les points de vue et les tailles d'objet clairsemés, et combine les cadres de délimitation 2D dans les vues gauche et droite pour calculer un cadre de délimitation d'objet 3D grossier. Ensuite, des cadres de délimitation 3D précis sont récupérés en utilisant l'alignement photométrique basé sur la région des régions d'intérêt gauche et droite. La figure ci-dessous représente la structure de son réseau.
2.2 Estimation de la profondeur
Le principe de l'estimation de la profondeur binoculaire est très simple et repose sur la distance en pixels d entre le même point 3D sur les vues gauche et droite (en supposant que les deux caméras maintiennent la même hauteur, donc seule la direction horizontale est considérée comme la distance), c'est-à-dire la parallaxe, la distance focale f de la caméra et la distance B (longueur de base) entre les deux caméras, pour estimer la profondeur du point 3D. est la suivante. La profondeur peut être calculée en estimant la parallaxe. Ensuite, tout ce que vous avez à faire est de trouver un point correspondant sur l’autre image pour chaque pixel.

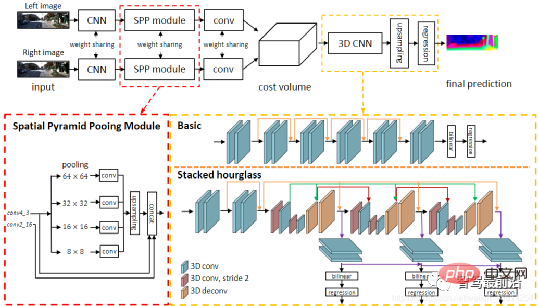
Pour chaque d possible, l'erreur de correspondance à chaque pixel peut être calculée, de sorte qu'un volume de coût de données d'erreur tridimensionnelle est obtenu. Grâce au Cost Volume, nous pouvons facilement obtenir la disparité à chaque pixel (d correspondant à l'erreur de correspondance minimale), et ainsi obtenir la valeur de profondeur. MC-CNN utilise un réseau neuronal convolutif pour prédire le degré de correspondance de deux patchs d'image et l'utilise pour calculer le coût de correspondance stéréo. Les coûts sont affinés grâce à une agrégation des coûts basée sur les intersections et à une correspondance semi-globale, suivies de contrôles de cohérence gauche-droite pour éliminer les erreurs dans les zones masquées. PSMNet propose un cadre d'apprentissage de bout en bout pour la correspondance stéréo qui ne nécessite aucun post-traitement, introduit un module de regroupement pyramidal pour incorporer des informations contextuelles globales dans les caractéristiques de l'image et fournit un CNN 3D en sablier empilé pour améliorer davantage les informations globales. La figure ci-dessous est sa structure de réseau.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 CLIP-BEVFormer : superviser explicitement la structure BEVFormer pour améliorer les performances de détection à longue traîne
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer : superviser explicitement la structure BEVFormer pour améliorer les performances de détection à longue traîne
Mar 26, 2024 pm 12:41 PM
Écrit ci-dessus et compréhension personnelle de l'auteur : À l'heure actuelle, dans l'ensemble du système de conduite autonome, le module de perception joue un rôle essentiel. Le véhicule autonome roulant sur la route ne peut obtenir des résultats de perception précis que via le module de perception en aval. dans le système de conduite autonome, prend des jugements et des décisions comportementales opportuns et corrects. Actuellement, les voitures dotées de fonctions de conduite autonome sont généralement équipées d'une variété de capteurs d'informations de données, notamment des capteurs de caméra à vision panoramique, des capteurs lidar et des capteurs radar à ondes millimétriques pour collecter des informations selon différentes modalités afin d'accomplir des tâches de perception précises. L'algorithme de perception BEV basé sur la vision pure est privilégié par l'industrie en raison de son faible coût matériel et de sa facilité de déploiement, et ses résultats peuvent être facilement appliqués à diverses tâches en aval.
 Implémentation d'algorithmes d'apprentissage automatique en C++ : défis et solutions courants
Jun 03, 2024 pm 01:25 PM
Implémentation d'algorithmes d'apprentissage automatique en C++ : défis et solutions courants
Jun 03, 2024 pm 01:25 PM
Les défis courants rencontrés par les algorithmes d'apprentissage automatique en C++ incluent la gestion de la mémoire, le multithread, l'optimisation des performances et la maintenabilité. Les solutions incluent l'utilisation de pointeurs intelligents, de bibliothèques de threads modernes, d'instructions SIMD et de bibliothèques tierces, ainsi que le respect des directives de style de codage et l'utilisation d'outils d'automatisation. Des cas pratiques montrent comment utiliser la bibliothèque Eigen pour implémenter des algorithmes de régression linéaire, gérer efficacement la mémoire et utiliser des opérations matricielles hautes performances.
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
La détection de cibles est un problème relativement mature dans les systèmes de conduite autonome, parmi lesquels la détection des piétons est l'un des premiers algorithmes à être déployés. Des recherches très complètes ont été menées dans la plupart des articles. Cependant, la perception de la distance à l’aide de caméras fisheye pour une vue panoramique est relativement moins étudiée. En raison de la distorsion radiale importante, la représentation standard du cadre de délimitation est difficile à mettre en œuvre dans les caméras fisheye. Pour alléger la description ci-dessus, nous explorons les conceptions étendues de boîtes englobantes, d'ellipses et de polygones généraux dans des représentations polaires/angulaires et définissons une métrique de segmentation d'instance mIOU pour analyser ces représentations. Le modèle fisheyeDetNet proposé avec une forme polygonale surpasse les autres modèles et atteint simultanément 49,5 % de mAP sur l'ensemble de données de la caméra fisheye Valeo pour la conduite autonome.
 Explorez les principes sous-jacents et la sélection d'algorithmes de la fonction de tri C++
Apr 02, 2024 pm 05:36 PM
Explorez les principes sous-jacents et la sélection d'algorithmes de la fonction de tri C++
Apr 02, 2024 pm 05:36 PM
La couche inférieure de la fonction de tri C++ utilise le tri par fusion, sa complexité est O(nlogn) et propose différents choix d'algorithmes de tri, notamment le tri rapide, le tri par tas et le tri stable.
 Les dernières nouvelles de l'Université d'Oxford ! Mickey : correspondance d'images 2D en 3D SOTA ! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Les dernières nouvelles de l'Université d'Oxford ! Mickey : correspondance d'images 2D en 3D SOTA ! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Lien du projet écrit devant : https://nianticlabs.github.io/mickey/ Étant donné deux images, la pose de la caméra entre elles peut être estimée en établissant la correspondance entre les images. En règle générale, ces correspondances sont 2D à 2D et nos poses estimées sont à échelle indéterminée. Certaines applications, telles que la réalité augmentée instantanée, à tout moment et en tout lieu, nécessitent une estimation de pose des métriques d'échelle, elles s'appuient donc sur des estimateurs de profondeur externes pour récupérer l'échelle. Cet article propose MicKey, un processus de correspondance de points clés capable de prédire les correspondances métriques dans l'espace d'une caméra 3D. En apprenant la correspondance des coordonnées 3D entre les images, nous sommes en mesure de déduire des métriques relatives.
