

Les robots intelligents sont des représentants typiques des produits intelligents. Les robots intelligents doivent avoir au moins les trois éléments suivants : premièrement, l'élément de détection, utilisé pour comprendre l'état de l'environnement environnant ; deuxièmement, l'élément de mouvement, pour effectuer des actions réactives envers le monde extérieur ; troisièmement, l'élément de réflexion, basé sur ; les informations obtenues à partir de l'élément sensible, réfléchissez et adoptez quel type d'action.
Les gens divisent généralement les robots en trois générations. La première génération est constituée de robots programmables. Ce type de robot peut généralement effectuer quelques opérations simples et répétitives selon le programme programmé par l'opérateur. Cette génération de robots est utilisée depuis la seconde moitié des années 1960 et est largement utilisée dans l'industrie.
La deuxième génération est un robot perceptuel, également appelé robot adaptatif. Il est développé sur la base du robot de première génération et possède différents degrés de capacité à percevoir l'environnement.
Le robot de troisième génération dispose de mécanismes intelligents tels que la reconnaissance, le raisonnement, la planification et l'apprentissage. Il peut combiner intelligemment la perception et l'action, de sorte qu'il peut fonctionner dans des environnements non spécifiques et est appelé robot intelligent.
La différence fondamentale entre les robots intelligents et les robots industriels est que les robots intelligents ont les fonctions de perception, de reconnaissance, de jugement et de planification. Par conséquent, l'intelligence de la machine peut être divisée en deux niveaux. la compréhension et le jugement ; l'autre est Il a pour fonction de résumer l'expérience et l'apprentissage.
Les robots intelligents ont des structures et des fonctions de système différentes en raison de leurs différentes utilisations. Nous présentons ici uniquement la structure de base et les fonctionnalités intelligentes des robots destinés aux applications industrielles. La figure 2.3 est la structure de base d'un robot intelligent.
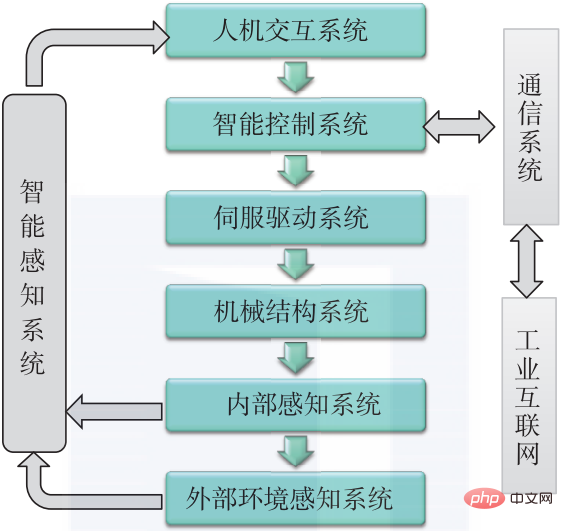
▲ Figure 2.3 La composition de base d'un robot intelligent
La caractéristique intelligente la plus importante d'un robot intelligent est ses capacités de perception externe et interne.
La capacité de percevoir l'environnement externe est réalisée par le système de perception externe, qui utilise une série de capteurs externes (notamment la vision, l'audition, le toucher, la proximité, la force, l'infrarouge, les ultrasons, le laser, etc.) pour traiter les informations de détection, réaliser le contrôle et le fonctionnement. Ces capteurs comprennent des capteurs de collision, des capteurs infrarouges lointains, des capteurs photosensibles, des microphones, des encodeurs photoélectriques, des capteurs pyroélectriques, des capteurs à ultrasons, des capteurs infrarouges à portée continue, des boussoles numériques, des capteurs de température, etc.
Le système de perception interne se compose d'une série de capteurs utilisés pour détecter l'état du robot lui-même. Il peut surveiller la position, la vitesse, l'accélération, la pression et la trajectoire de chaque coordonnée de chaque partie mobile du robot en temps réel. surveiller la force, l'équilibre et la température, etc.
Le système de perception intelligent se compose d'informations obtenues à partir du système de perception de l'environnement externe et du système de perception interne. Il existe de plus en plus de types et de nombres de capteurs utilisés dans ce système. Chaque capteur a certaines conditions d'utilisation et plage de détection, et peut fournir des informations sur une partie ou la totalité de l'environnement ou de l'objet afin d'utiliser efficacement ces informations du capteur. il est nécessaire d'utiliser une certaine forme de traitement de synthèse ou de fusion des informations des capteurs. Un système de traitement multiforme pour différents types d'informations est la fusion des capteurs.
La technologie de fusion de capteurs implique de nouvelles théories et méthodes dans les domaines de l'information, de la détection et du contrôle tels que les réseaux de neurones, l'ingénierie des connaissances et la théorie floue.
La capacité de contrôle du système du robot intelligent est réalisée par le système de contrôle intelligent. La tâche de ce système est de l'identifier et de l'appliquer via la base de connaissances et le système expert basés sur le programme d'instructions de fonctionnement du robot et. les signaux renvoyés par les capteurs internes et externes. Différents algorithmes analysent et prennent des décisions, puis émettent des instructions de contrôle pour contrôler le robot afin d'effectuer les mouvements et les fonctions spécifiés.
Si le robot n'a pas de caractéristiques de retour d'informations, le système de contrôle du robot est un système de contrôle en boucle ouverte, sinon il s'agit d'un système de contrôle en boucle fermée. Selon le principe de contrôle, le système de contrôle peut être divisé en système de contrôle de programme, système de contrôle adaptatif et système de contrôle d'intelligence artificielle. Selon la forme de mouvement de contrôle, le système de contrôle peut être divisé en système de contrôle ponctuel et système de contrôle de trajectoire continue.
Comment analyser et traiter ces informations et prendre des décisions de contrôle correctes nécessite le soutien d'un système expert. Le système expert interprète les données collectées par les capteurs, dérive la description de l'état du robot, déduit et prédit les résultats possibles à partir de l'état donné et diagnostique les éventuelles pannes du système grâce à l'évaluation de l'état de fonctionnement.
Selon les objectifs et les contraintes de la conception du système, planifier et concevoir une série d'actions, surveiller les différences entre les résultats obtenus et le plan, et proposer des méthodes pour maintenir le bon fonctionnement du système. Le système d'intelligence artificielle est combiné aux méthodes de contrôle traditionnelles pour former l'ensemble du processus de contrôle en boucle fermée, qui nécessite la prise en charge d'une grande quantité de connaissances, de règles, d'algorithmes, de reconnaissance de formes et d'autres technologies.
À mesure que les exigences en matière de robots intelligents continuent d'augmenter, l'environnement auquel les robots sont confrontés est souvent imprévisible et les environnements non structurés sont devenus courants. Dans un environnement dynamique et complexe, si un robot souhaite accomplir des tâches complexes, sa capacité d’apprentissage est extrêmement importante.
Dans ce cas, le robot doit s'ajuster continuellement par apprentissage en fonction de l'environnement externe et des tâches auxquelles il est confronté, et extraire des informations utiles lors de l'interaction avec l'environnement, afin qu'il puisse progressivement comprendre et s'adapter à l'environnement. Grâce à l'apprentissage, le niveau d'intelligence du robot peut être continuellement amélioré, lui permettant de faire face à certaines situations inattendues, compensant ainsi les éventuelles déficiences causées par les concepteurs lors du processus de conception.
Par conséquent, la capacité d'apprentissage est l'une des capacités importantes que les robots devraient avoir. Elle fournit une garantie efficace aux robots dans des environnements complexes et changeants en termes de compréhension, de planification et de prise de décision de l'environnement, améliorant ainsi l'efficacité opérationnelle de l'ensemble du système robotique. .
Les robots intelligents, comme tous les produits intelligents, deviendront un terminal de l'Internet industriel à l'avenir, les robots intelligents doivent donc avoir la capacité de se connecter à l'Internet industriel.
En utilisant le principe du système de fusion cyber-physique (CPS) pour construire un module de communication, qui est intégré au système de contrôle intelligent en interne pour collecter tous les états de fonctionnement du robot en externe, il est connecté à Internet via un bus de terrain standard ; et une carte Ethernet pour réaliser la communication de robot à robot et la communication de robot à robot. L'intégration entre les systèmes logistiques et d'autres systèmes d'application réalise l'intégration entre le monde physique et le monde de l'information.
Les systèmes IoT intelligents brisent les frontières entre le monde physique traditionnel et les systèmes d'information, transformant les données en informations opportunes et utiles, permettant aux utilisateurs de profiter pleinement de diverses ressources dans les mondes virtuel et réel.
Cet article est extrait de « Smart Manufacturing : How AI Implements Manufacturing » (ISBN : 978-7-111-69931-6), et est publié avec l'autorisation de l'éditeur.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Logiciel d'édition de pages Web
Logiciel d'édition de pages Web
 Solution à 0x84b10001
Solution à 0x84b10001
 Quelles sont les vulnérabilités courantes de Tomcat ?
Quelles sont les vulnérabilités courantes de Tomcat ?
 Comment ouvrir le fichier apk
Comment ouvrir le fichier apk
 ps ajuster les touches de raccourci du bord
ps ajuster les touches de raccourci du bord
 l'utilisation du processeur
l'utilisation du processeur
 Impossible de démarrer votre ordinateur normalement
Impossible de démarrer votre ordinateur normalement
 outils de développement Python
outils de développement Python
 exception nullpointerexception
exception nullpointerexception








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



