

Comment tracer une coque convexe en Python ?

ConvexHull
ConvexHull est une classe spatiale. Sa fonction principale est de trouver les bords d'un ensemble de points et de créer une coque convexe. Le paramètre d'initialisation nécessaire est un ensemble de points, le format de l'ensemble de points est un tableau de n×m dimensions, n est le nombre de points dans l'ensemble de points et m est la dimension du point.
from scipy.spatial import ConvexHull
import matplotlib.pyplot as plt
import numpy as np
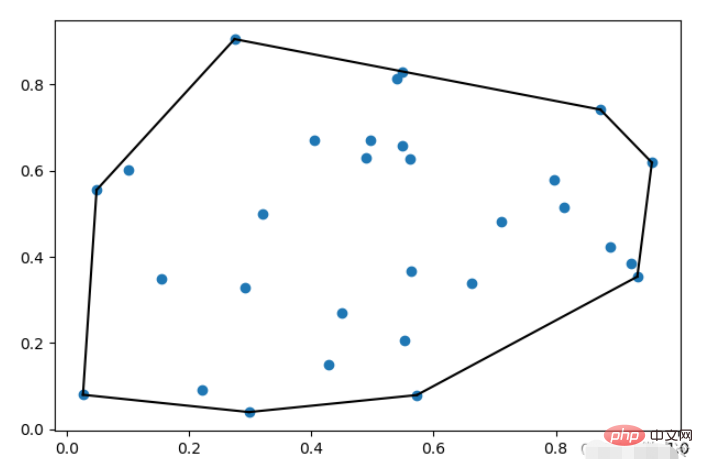
pts = np.random.rand(30, 2)
hull = ConvexHull(pts)
plt.plot(pts[:,0], pts[:,1], 'o')
for i in hull.simplices:
plt.plot(pts[i, 0], pts[i, 1], 'k-')
plt.show()où simplex est le numéro de série du point d'index. L'effet après le dessin est le suivant
ConvexHull a deux paramètres facultatifs. Incrémental est un paramètre booléen. Lorsqu'il est vrai, de nouveaux points peuvent être ajoutés. .
Les paramètres spécifiques de qhull_options peuvent être visualisés dans qhull Seul QG sera démontré ci-dessous.
QG
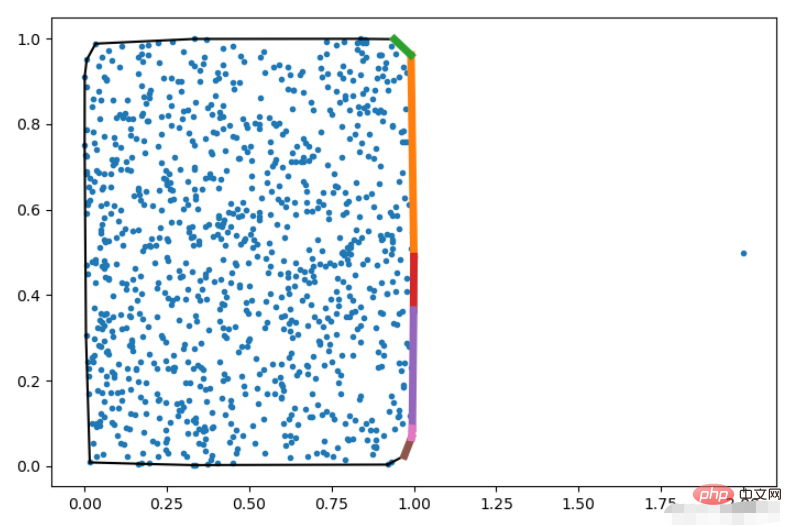
QGn signifie que le nième point est considéré comme le point d'observation. Après avoir divisé le point défini par l'enveloppe convexe, si les sommets sont connectés et utilisés comme mur, alors les points visibles par le point d'observation sont. marqué comme bon, l'effet est comme indiqué ci-dessous
pts = np.random.rand(1000, 2)
# 添加一个观察点
pts = np.vstack([pts, np.array([[2,0.5]])])
hull = ConvexHull(pts, qhull_options='QG1000')
plt.plot(pts[:,0], pts[:,1], '.')
for i in hull.simplices:
plt.plot(pts[i, 0], pts[i, 1], 'k-')
for i in hull.simplices[hull.good]:
plt.plot(pts[i, 0],pts[i, 1], lw=5)
plt.show()L'effet est comme le montre l'image
Boîtier tridimensionnel
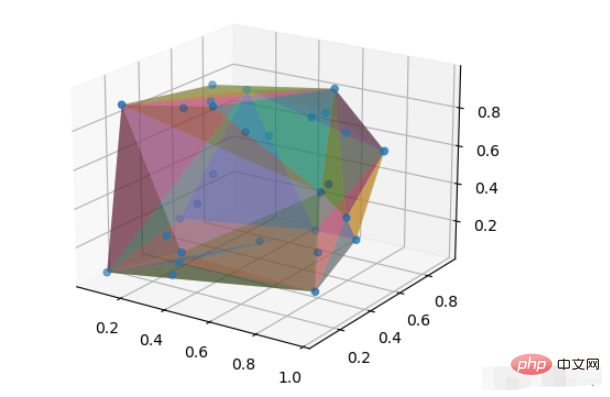
La coque convexe dans le boîtier bidimensionnel est évidemment une figure fermée composée de lignes, et la coque convexe dans le cas tridimensionnel devrait naturellement être une géométrie tridimensionnelle. Étendu à n'importe quelle dimension, l'enveloppe convexe est en fait un simplexe. Les simplexes de ConvexHull sont les points qui composent le simplexe et sont indexés dans l'ensemble d'origine. L'exemple est le suivant
pts = np.random.rand(30, 3)
hull = ConvexHull(pts)
ax = plt.subplot(projection='3d')
ax.scatter(pts[:,0], pts[:,1], pts[:,2])
for i in hull.simplices:
ax.plot_trisurf(pts[i, 0], pts[i, 1], pts[i,2], alpha=0.5)
plt.show()Le paramètre alpha est utilisé pour ajuster la transparence de la surface triangulaire, de sorte que les points à l'intérieur de la coque convexe puissent être vus à travers la coque convexe.
L'effet est le suivant
Attribut ConvexHull
Le concept de simplex a déjà été introduit, c'est-à-dire que la figure composée de la coque convexe est un simplex. Dans le cas bidimensionnel, l'enveloppe convexe est entourée de segments de ligne ; dans le cas tridimensionnel, l'enveloppe convexe est entourée de plans, elle peut être exprimée comme un simplex qui constitue l'enveloppe convexe, entourée. par les hypersurfaces. Puisque le concept d’hypersurface n’a pas de frontières, la surface de coque convexe avec ses sommets et ses arêtes est appelée ci-après hypersurface simplexe.
Les attributs couramment utilisés dans la classe ConvexHull sont les suivants
ensemble de points de points entourés d'une coque convexe
index des sommets du sommet simplex dans l'ensemble de points
simplices simplex hypersurface
ne super surface des voisins Indices des hypersurfaces adjacentes
équations Paramètres des équations d'hypersurface
Des exemples d'équations d'hypersurface dans le cas tridimensionnel sont les suivants, c'est-à-dire que chaque hypersurface a 4 paramètres
>>> hull.equations
array([[-0.5509472 , 0.72386104, -0.41530999, -0.36369123],
[-0.26155355, 0.16210178, -0.95147925, 0.02022163],
[-0.99132368, -0.0460725 , 0.12310441, 0.045523 ],
[-0.98526526, -0.07170442, 0.15527666, 0.04749854],
[-0.15900968, -0.98529789, -0.06248198, 0.13294496],
# .......Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 PHP et Python: différents paradigmes expliqués
Apr 18, 2025 am 12:26 AM
PHP et Python: différents paradigmes expliqués
Apr 18, 2025 am 12:26 AM
PHP est principalement la programmation procédurale, mais prend également en charge la programmation orientée objet (POO); Python prend en charge une variété de paradigmes, y compris la POO, la programmation fonctionnelle et procédurale. PHP convient au développement Web, et Python convient à une variété d'applications telles que l'analyse des données et l'apprentissage automatique.
 Choisir entre PHP et Python: un guide
Apr 18, 2025 am 12:24 AM
Choisir entre PHP et Python: un guide
Apr 18, 2025 am 12:24 AM
PHP convient au développement Web et au prototypage rapide, et Python convient à la science des données et à l'apprentissage automatique. 1.Php est utilisé pour le développement Web dynamique, avec une syntaxe simple et adapté pour un développement rapide. 2. Python a une syntaxe concise, convient à plusieurs champs et a un écosystème de bibliothèque solide.
 Python vs JavaScript: la courbe d'apprentissage et la facilité d'utilisation
Apr 16, 2025 am 12:12 AM
Python vs JavaScript: la courbe d'apprentissage et la facilité d'utilisation
Apr 16, 2025 am 12:12 AM
Python convient plus aux débutants, avec une courbe d'apprentissage en douceur et une syntaxe concise; JavaScript convient au développement frontal, avec une courbe d'apprentissage abrupte et une syntaxe flexible. 1. La syntaxe Python est intuitive et adaptée à la science des données et au développement back-end. 2. JavaScript est flexible et largement utilisé dans la programmation frontale et côté serveur.
 Peut-on exécuter le code sous Windows 8
Apr 15, 2025 pm 07:24 PM
Peut-on exécuter le code sous Windows 8
Apr 15, 2025 pm 07:24 PM
VS Code peut fonctionner sur Windows 8, mais l'expérience peut ne pas être excellente. Assurez-vous d'abord que le système a été mis à jour sur le dernier correctif, puis téléchargez le package d'installation VS Code qui correspond à l'architecture du système et l'installez comme invité. Après l'installation, sachez que certaines extensions peuvent être incompatibles avec Windows 8 et doivent rechercher des extensions alternatives ou utiliser de nouveaux systèmes Windows dans une machine virtuelle. Installez les extensions nécessaires pour vérifier si elles fonctionnent correctement. Bien que le code VS soit possible sur Windows 8, il est recommandé de passer à un système Windows plus récent pour une meilleure expérience de développement et une meilleure sécurité.
 Le code Visual Studio peut-il être utilisé dans Python
Apr 15, 2025 pm 08:18 PM
Le code Visual Studio peut-il être utilisé dans Python
Apr 15, 2025 pm 08:18 PM
VS Code peut être utilisé pour écrire Python et fournit de nombreuses fonctionnalités qui en font un outil idéal pour développer des applications Python. Il permet aux utilisateurs de: installer des extensions Python pour obtenir des fonctions telles que la réalisation du code, la mise en évidence de la syntaxe et le débogage. Utilisez le débogueur pour suivre le code étape par étape, trouver et corriger les erreurs. Intégrez Git pour le contrôle de version. Utilisez des outils de mise en forme de code pour maintenir la cohérence du code. Utilisez l'outil de liaison pour repérer les problèmes potentiels à l'avance.
 PHP et Python: une plongée profonde dans leur histoire
Apr 18, 2025 am 12:25 AM
PHP et Python: une plongée profonde dans leur histoire
Apr 18, 2025 am 12:25 AM
PHP est originaire en 1994 et a été développé par Rasmuslerdorf. Il a été utilisé à l'origine pour suivre les visiteurs du site Web et a progressivement évolué en un langage de script côté serveur et a été largement utilisé dans le développement Web. Python a été développé par Guidovan Rossum à la fin des années 1980 et a été publié pour la première fois en 1991. Il met l'accent sur la lisibilité et la simplicité du code, et convient à l'informatique scientifique, à l'analyse des données et à d'autres domaines.
 Comment exécuter des programmes dans Terminal Vscode
Apr 15, 2025 pm 06:42 PM
Comment exécuter des programmes dans Terminal Vscode
Apr 15, 2025 pm 06:42 PM
Dans VS Code, vous pouvez exécuter le programme dans le terminal via les étapes suivantes: Préparez le code et ouvrez le terminal intégré pour vous assurer que le répertoire de code est cohérent avec le répertoire de travail du terminal. Sélectionnez la commande Run en fonction du langage de programmation (tel que Python de Python your_file_name.py) pour vérifier s'il s'exécute avec succès et résoudre les erreurs. Utilisez le débogueur pour améliorer l'efficacité du débogage.
 L'extension VScode est-elle malveillante?
Apr 15, 2025 pm 07:57 PM
L'extension VScode est-elle malveillante?
Apr 15, 2025 pm 07:57 PM
Les extensions de code vs posent des risques malveillants, tels que la cachette de code malveillant, l'exploitation des vulnérabilités et la masturbation comme des extensions légitimes. Les méthodes pour identifier les extensions malveillantes comprennent: la vérification des éditeurs, la lecture des commentaires, la vérification du code et l'installation avec prudence. Les mesures de sécurité comprennent également: la sensibilisation à la sécurité, les bonnes habitudes, les mises à jour régulières et les logiciels antivirus.
