
 Périphériques technologiques
IA
La sous-revue Nature de la Hillhouse School of Artificial Intelligence de l'Université Renmin tente d'utiliser des modèles de base multimodaux pour évoluer vers l'intelligence artificielle générale.
Périphériques technologiques
IA
La sous-revue Nature de la Hillhouse School of Artificial Intelligence de l'Université Renmin tente d'utiliser des modèles de base multimodaux pour évoluer vers l'intelligence artificielle générale.
La sous-revue Nature de la Hillhouse School of Artificial Intelligence de l'Université Renmin tente d'utiliser des modèles de base multimodaux pour évoluer vers l'intelligence artificielle générale.

Récemment, le professeur Lu Zhiwu, le professeur agrégé permanent Sun Hao et le doyen du professeur Wen Jirong de la Hillhouse School of Artificial Intelligence de l'Université Renmin de Chine ont publié un article en tant qu'auteurs co-correspondants dans la revue internationale complète "Nature Communications" (anglais nom : Nature Communications, dénommé Nat Commun) a publié un article de recherche intitulé « Vers une intelligence générale artificielle via un modèle de fondation multimodal ». Le premier auteur de l'article est le doctorant Fei Nanyi. Ce travail tente d’exploiter les modèles de base multimodaux vers l’intelligence artificielle générale et aura de larges implications pour divers domaines de l’IA+ tels que les neurosciences et les soins de santé. Cet article est une interprétation de cet article. # 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 # # 🎜🎜 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 # # # Lien papier :https://www.nature.com/articles/s41467-022-30761-2

Lien du code : https:/ /github.com/neilfei/brivl-nmi
- L'objectif fondamental de l'intelligence artificielle est d'imiter les principales activités cognitives humaines, telles que perception, mémoire, raisonnement, etc. Bien que de nombreux algorithmes ou modèles d'intelligence artificielle aient connu un grand succès dans divers domaines de recherche, la plupart des recherches sur l'intelligence artificielle sont encore limitées par l'acquisition de grandes quantités de données étiquetées ou par des ressources informatiques insuffisantes pour prendre en charge la formation sur des données à grande échelle. une seule capacité cognitive.
- Pour surmonter ces limitations et faire un pas vers l'intelligence artificielle générale, nous avons développé un modèle de base multi-modalité (langage visuel), également appelé modèle de pré-formation. De plus, pour que le modèle obtienne une forte capacité de généralisation, nous proposons que les images et les textes dans les données d'entraînement suivent l'hypothèse de faible corrélation sémantique (comme le montre la figure 1b), plutôt que la correspondance fine des zones d'images et des mots. (forte corrélation sémantique), en raison de la forte corrélation sémantique. L'hypothèse d'une corrélation sémantique fera perdre au modèle les émotions et les pensées complexes que les gens impliquent lors du sous-titrage des images. Figure 1 : Basé sur le modèle BriVL faible d’hypothèse de relation sémantique. a. Comparaison entre notre modèle BriVL et le cerveau humain dans le traitement des informations du langage visuel. b. Comparaison de la modélisation de données sémantiques faibles et de la modélisation de données sémantiques fortes. En s'entraînant sur des données d'images et de textes à grande échelle explorées sur Internet, le modèle de base multimodal que nous avons obtenu montre une puissante capacité polyvalente et imagination. Nous pensons que nos travaux représentent une étape importante (bien que potentiellement petite) vers l’intelligence artificielle générale et auront de vastes implications pour divers domaines de l’IA+ tels que les neurosciences et les soins de santé.
Method
Nous avons développé un modèle de base multimodal à grande échelle pour mener des formations auto-supervisées sur des données multimodales massives, et Nommez-le BriVL (Bridging-Vision-and-Language).
Tout d'abord, nous utilisons un ensemble de données graphiques et textuelles multi-sources à grande échelle construit à partir d'Internet, appelé Weak Semantic Correlation Dataset (WSCD). WSCD collecte des paires image-texte chinois provenant de plusieurs sources sur le Web, notamment des actualités, des encyclopédies et des médias sociaux. Nous avons uniquement filtré les données pornographiques et sensibles dans WSCD sans aucune forme d'édition ou de modification des données originales afin de maintenir leur distribution naturelle des données. Au total, le WSCD compte environ 650 millions de paires image-texte couvrant de nombreux sujets tels que le sport, la vie quotidienne et les films. 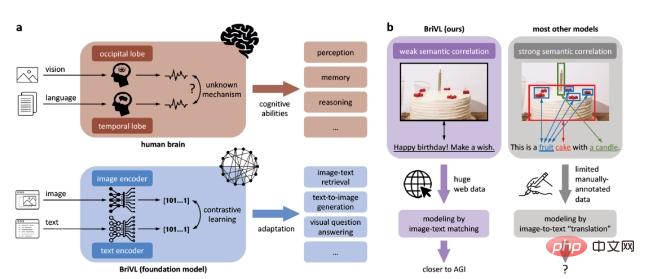

Deuxièmement, pour notre architecture de réseau, puisqu'il n'y a pas nécessairement de correspondance régionale fine de mots entre les images et les textes, nous abandonnons le détecteur d'objets qui prend beaucoup de temps, en adoptant une architecture simple à deux tours, il est capable de coder la saisie d'images et de texte via deux encodeurs indépendants (Figure 2). La structure à deux tours présente des avantages évidents en termes d'efficacité dans le processus d'inférence, car les caractéristiques de l'ensemble candidat peuvent être calculées et indexées avant l'interrogation, répondant ainsi aux exigences en temps réel des applications du monde réel. Troisièmement, avec le développement de technologies de formation distribuées à grande échelle et d’apprentissage auto-supervisé, il est devenu possible de former des modèles avec des données multimodales massives non étiquetées.
Plus précisément, afin de modéliser la faible corrélation des paires image-texte et d'apprendre un espace sémantique unifié, nous avons conçu un algorithme d'apprentissage contrastif multimodal basé sur la méthode d'apprentissage contrastif monomodal MoCo. Comme le montre la figure 2, notre modèle BriVL utilise le mécanisme d'impulsion pour maintenir dynamiquement la file d'attente d'échantillons négatifs dans différents lots d'entraînement. De cette façon, nous disposons d'un nombre relativement grand d'échantillons négatifs (critiques pour l'apprentissage contrastif), tout en utilisant une taille de lot relativement petite pour réduire l'utilisation de la mémoire GPU (c'est-à-dire des économies de ressources GPU).
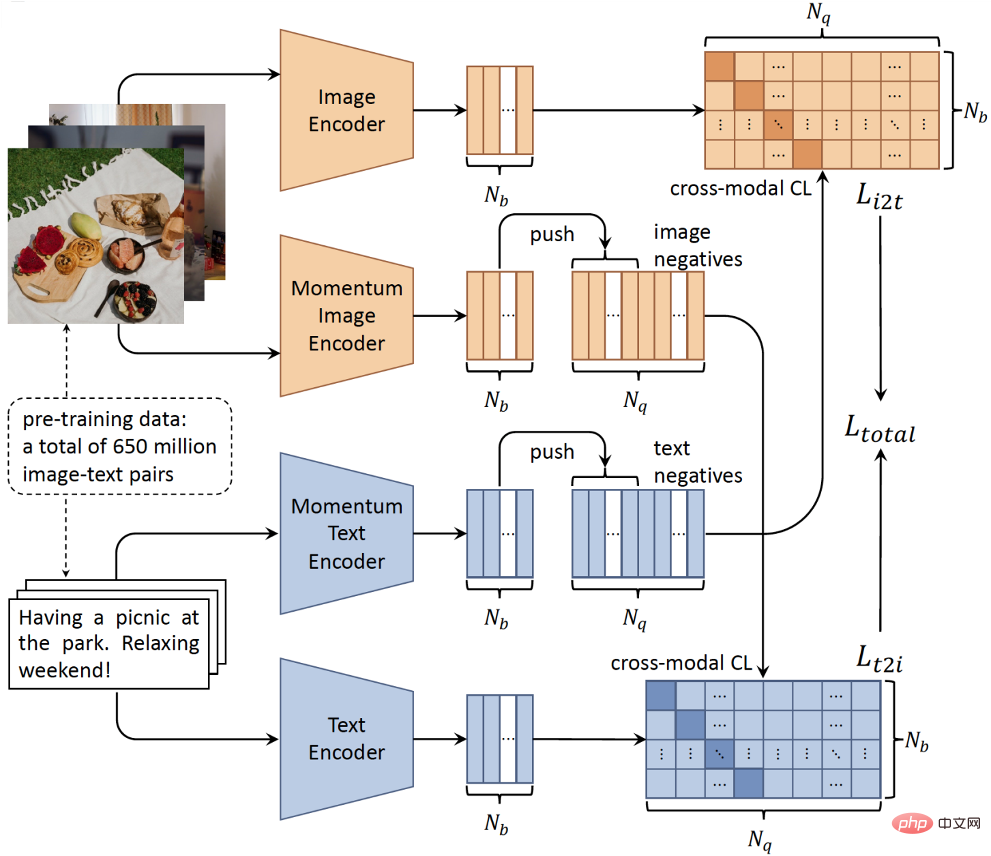
Figure 2 : Diagramme schématique du modèle BriVL pour la pré-formation multimodale à grande échelle.
Principaux résultats
Visualisation du réseau neuronal
Lorsque nous entendons des mots ou des phrases descriptives, certaines scènes nous viennent à l'esprit. Pour notre BriVL, après avoir été pré-entraîné sur un si grand nombre de paires image-texte faiblement corrélées, nous sommes très curieux de savoir ce qu'il imagine lorsqu'on lui donne du texte.
Plus précisément, nous saisissons d'abord un morceau de texte et obtenons son intégration de texte via l'encodeur de texte de BriVL. Ensuite, nous initialisons de manière aléatoire une image bruyante et obtenons l'intégration de ses fonctionnalités via l'encodeur d'image. Étant donné que l’image d’entrée est initialisée de manière aléatoire, ses caractéristiques doivent être incompatibles avec celles du texte d’entrée. Par conséquent, nous définissons l'objectif de faire correspondre deux intégrations de fonctionnalités et mettons à jour l'image d'entrée via la rétropropagation. L'image résultante montre clairement comment BriVL a imaginé le texte saisi. Ici, nous n'utilisons aucun module ou donnée supplémentaire, et le BriVL pré-entraîné est également gelé tout au long du processus de visualisation.
Nous introduisons d'abord la capacité de BriVL à imaginer certains concepts sémantiques de haut niveau (Figure 3). Comme vous pouvez le constater, même si ces concepts sont très abstraits, la visualisation est capable de montrer leur forme concrète (par exemple, « nature » : des plantes ressemblant à de l'herbe ; « temps » : une horloge ; « science » : un visage avec des lunettes et une fiole Erlenmeyer ; "Dreamland" : des nuages, un pont vers la porte et une ambiance onirique). Cette capacité à généraliser des concepts abstraits à une série d'objets concrets démontre l'efficacité de notre pré-formation multimodale utilisant uniquement des données faiblement sémantiquement liées.

Figure 3 : L'imagination des concepts abstraits du modèle BriVL.
Dans la figure 4, nous montrons l'imagination de BriVL pour les phrases. L'imagination de BriVL de "Il y a du soleil derrière les nuages" incarne non seulement littéralement le soleil derrière les nuages, mais semble également montrer des conditions dangereuses en mer (il y a des objets ressemblant à des navires et des vagues sur la gauche), exprimant le sens implicite de ceci phrase . Dans la visualisation « Blooming as Summer Flowers », nous pouvons voir une grappe de fleurs. Les entrées de texte les plus complexes pour les deux scénarios suivants proviennent toutes deux de la poésie chinoise ancienne et leur syntaxe est complètement différente de la grande majorité des textes de l'ensemble de formation. Il semble que BriVL puisse aussi bien les comprendre : pour « Trois ou deux branches de fleurs de pêcher à l'extérieur du bambou », on voit qu'il y a des bambous et des fleurs roses ; pour « Le soleil est sur les montagnes, le fleuve Jaune se jette dans les montagnes ; mer", on peut voir Les arbres sur la montagne couvrent le soleil couchant, et il y a un petit bateau sur la rivière devant. Dans l’ensemble, nous avons constaté que BriVL reste très imaginatif même lorsqu’il est sollicité par des phrases complexes.
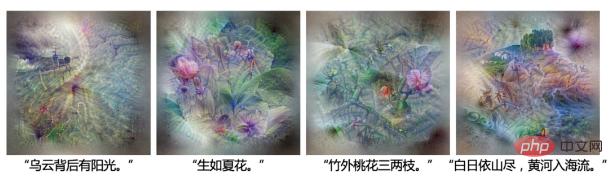

Figure 4 : Imagination des phrases chinoises du modèle BriVL.
Dans la figure 5, plusieurs textes similaires sont utilisés pour la visualisation du réseau neuronal de BriVL. Pour les « Montagnes avec forêts », il y a plus de zones vertes dans l'image ; pour les « Montagnes avec des pierres », il y a plus de rochers dans l'image ; pour les « Montagnes avec neige », le sol autour des arbres du milieu est soit blanc, soit bleu ; avec les cascades, on peut voir de l'eau bleue tomber et même de la vapeur d'eau. Ces visualisations démontrent que BriVL peut comprendre et imaginer avec précision les modificateurs de montagne.
Figure 5 : Imagination du modèle BriVL de « montagnes avec… ».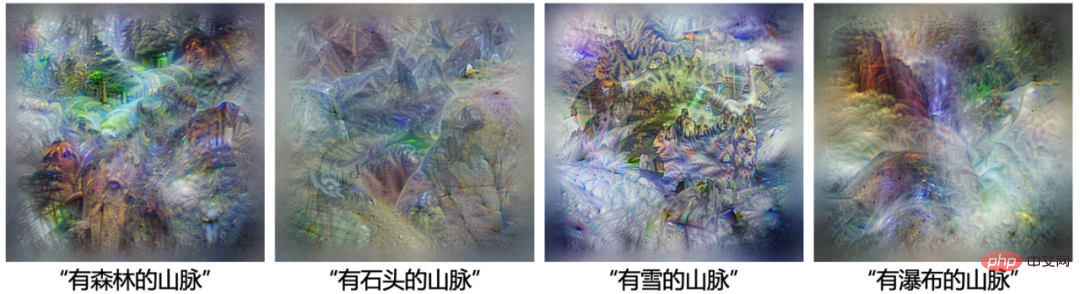
文graphique généré La visualisation du réseau neuronal est très simple, mais peut parfois être difficile à interpréter. Nous avons donc développé une approche alternative de visualisation/interprétabilité afin que le contenu imaginé par BriVL puisse être mieux compris par nous, les humains. Plus précisément, nous exploitons VQGAN pour générer des images sous la direction de BriVL car VQGAN, pré-entraîné sur l'ensemble de données ImageNet, est très efficace pour générer des images réalistes. Nous obtenons d'abord aléatoirement une séquence de jetons et obtenons une image générée à partir d'un VQGAN pré-entraîné. Ensuite, nous introduisons l'image générée dans l'encodeur d'image de BriVL et un morceau de texte dans l'encodeur de texte. Enfin, nous définissons la cible de correspondance entre les incorporations d'images et de texte et mettons à jour la séquence de jetons initiale via la rétropropagation. Comme pour les visualisations de réseaux neuronaux, VQGAN et BriVL sont gelés pendant le processus de génération. À titre de comparaison, nous montrons également des images générées par le modèle CLIP d'OpenAI au lieu de BriVL.
Nous avons d'abord sélectionné quatre entrées de texte, montrant les résultats du graphique de génération de texte de CLIP et de notre BriVL dans la figure 6 et la figure 7 respectivement. CLIP et BriVL comprennent bien le texte, mais nous observons également deux différences majeures. Premièrement, des éléments de style dessin animé apparaîtront dans les images générées par CLIP, tandis que les images générées par BriVL seront plus réalistes et naturelles. Deuxièmement, CLIP a tendance à simplement placer des éléments ensemble, tandis que BriVL produit des images plus globalement unifiées. La première différence peut être due aux différentes données de formation utilisées par CLIP et BriVL. Les images de nos données de formation sont extraites d'Internet (pour la plupart de vraies photos), alors qu'il peut y avoir un certain nombre d'images de dessins animés dans les données de formation de CLIP. La deuxième différence peut être due au fait que CLIP utilise des paires image-texte avec une forte corrélation sémantique (via un filtrage de mots), alors que nous utilisons des données faiblement corrélées. Cela signifie que lors de la pré-formation multimodale, CLIP est plus susceptible d'apprendre les correspondances entre des objets spécifiques et des mots/phrases, tandis que BriVL tente de comprendre chaque image avec le texte donné dans son ensemble. Figure 6 : CLIP (avec ResNet-50x4) Exemple de graphique de génération de texte à l'aide de VQGAN.
 # 🎜🎜#
# 🎜🎜#
Figure 8 : Notre BriVL avec l'aide de VQGAN Une série d'exemples de génération de contenu cohérent.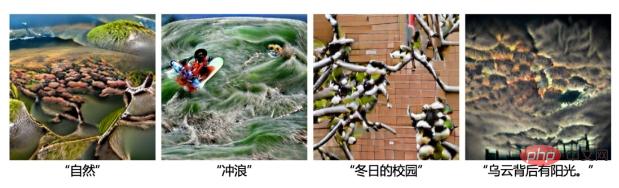

Dans la figure 9, nous avons sélectionné certains concepts/scénarios que les humains voient rarement (comme « mer brûlante » et « forêt rougeoyante »), même ceux qui n'existent pas dans la vraie vie (comme « ville cyberpunk » et « château dans les nuages »). Cela prouve que les performances supérieures de BriVL ne proviennent pas d'un surajustement des données de pré-entraînement, car les concepts/scénarios saisis ici n'existent même pas dans la vie réelle (bien sûr, ils ne figurent probablement pas dans l'ensemble de données de pré-entraînement). ). De plus, ces exemples générés réaffirment l'avantage de la pré-entraînement de BriVL sur des données faiblement sémantiquement liées (car un alignement de mots régionaux à granularité fine nuirait à la capacité d'imagination de BriVL).
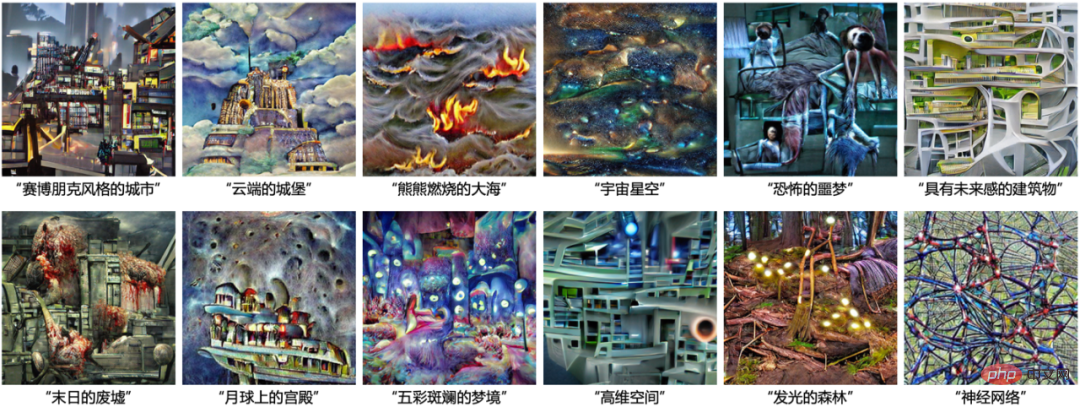
Figure 9 : Plus de résultats de génération de texte BriVL, les concepts/scénarios ne sont pas souvent vus par les humains voire n'existent pas dans la vraie vie.
De plus, nous avons également appliqué BriVL à plusieurs tâches en aval telles que la classification des images de télédétection par tir zéro, la classification par tir zéro des nouvelles chinoises, la réponse visuelle aux questions, etc., et avons obtenu des résultats intéressants. Veuillez consulter l'original. texte de notre article pour plus de détails.
Conclusion et discussion
Nous avons développé un modèle de base multimodal à grande échelle appelé BriVL, qui a été formé sur 650 millions d'images et de textes faiblement sémantiquement liés. Nous démontrons intuitivement l’espace d’intégration image-texte aligné grâce à la visualisation du réseau neuronal et aux graphiques générés par le texte. En outre, des expériences sur d’autres tâches en aval montrent également les capacités d’apprentissage/transfert inter-domaines de BriVL et les avantages de l’apprentissage multimodal par rapport à l’apprentissage monomodal. En particulier, nous avons constaté que BriVL semble avoir acquis une certaine capacité à imaginer et à raisonner. Nous pensons que ces avantages proviennent principalement de l’hypothèse de faible corrélation sémantique suivie par BriVL. Autrement dit, en exploitant des émotions et des pensées humaines complexes dans des paires image-texte faiblement corrélées, notre BriVL devient plus cognitive.
Nous pensons que ce pas que nous franchissons vers l'intelligence artificielle générale aura un large impact non seulement sur le domaine de l'intelligence artificielle lui-même, mais également sur divers domaines de l'IA+. Pour la recherche sur l'intelligence artificielle, basée sur notre cadre de pré-formation multimodal économe en ressources GPU, les chercheurs peuvent facilement étendre BriVL à des ampleurs plus grandes et à davantage de modalités pour obtenir un modèle de base plus général. Avec l’aide de modèles de base multimodaux à grande échelle, il est également plus facile pour les chercheurs d’explorer de nouvelles tâches (en particulier celles ne disposant pas d’échantillons d’annotations humaines suffisants). Pour le domaine de l'IA+, le modèle de base peut s'adapter rapidement à des environnements de travail spécifiques grâce à ses fortes capacités de généralisation. Par exemple, dans le domaine des soins de santé, les modèles de base multimodaux peuvent exploiter pleinement les données multimodales des cas pour améliorer la précision du diagnostic ; dans le domaine des neurosciences, les modèles de base multimodaux peuvent même aider à découvrir comment les informations multimodales sont utilisées dans les mécanismes de fusion ; dans le cerveau humain, car les réseaux neuronaux artificiels sont plus faciles à étudier que les systèmes neuronaux réels du cerveau humain.
Néanmoins, les modèles de base multimodaux sont encore confrontés à certains risques et défis. Le modèle de base peut apprendre des préjugés et des stéréotypes sur certaines choses, et ces problèmes doivent être soigneusement abordés avant la formation du modèle, puis surveillés et traités dans les applications en aval. De plus, à mesure que le modèle de base acquiert de plus en plus de capacités, nous devons veiller à ce qu'il ne soit pas utilisé par des personnes mal intentionnées pour éviter d'avoir un impact négatif sur la société. En outre, les recherches futures sur le modèle de base présentent également certains défis : comment développer des outils d'interprétabilité de modèle plus approfondis, comment créer des ensembles de données de pré-entraînement avec plus de modalités et comment utiliser des techniques de réglage fin plus efficaces pour transformer le modèle de base. modèle appliqué à diverses tâches en aval.
Les auteurs de cet article sont : Fei Nanyi, Lu Zhiwu, Gao Yizhao, Yang Guoxing, Huo Yuqi, Wen Jingyuan, Lu Haoyu, Song Ruihua, Gao Xin, Xiang Tao, Sun Hao, Wen Jirong le co- ; l'auteur correspondant est le professeur Lu Zhiwu du PNJ Gao Ling, le professeur agrégé permanent Sun Hao et le professeur Wen Jirong de l'École d'intelligence artificielle. L'article a été publié dans la revue internationale « Nature Communications » (nom anglais : Nature Communications, appelé Nat Commun). Cet article a été interprété par Fei Nanyi.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Le modèle MoE open source le plus puissant au monde est ici, avec des capacités chinoises comparables à celles du GPT-4, et le prix ne représente que près d'un pour cent de celui du GPT-4-Turbo.
May 07, 2024 pm 04:13 PM
Le modèle MoE open source le plus puissant au monde est ici, avec des capacités chinoises comparables à celles du GPT-4, et le prix ne représente que près d'un pour cent de celui du GPT-4-Turbo.
May 07, 2024 pm 04:13 PM
Imaginez un modèle d'intelligence artificielle qui non seulement a la capacité de surpasser l'informatique traditionnelle, mais qui permet également d'obtenir des performances plus efficaces à moindre coût. Ce n'est pas de la science-fiction, DeepSeek-V2[1], le modèle MoE open source le plus puissant au monde est ici. DeepSeek-V2 est un puissant mélange de modèle de langage d'experts (MoE) présentant les caractéristiques d'une formation économique et d'une inférence efficace. Il est constitué de 236B paramètres, dont 21B servent à activer chaque marqueur. Par rapport à DeepSeek67B, DeepSeek-V2 offre des performances plus élevées, tout en économisant 42,5 % des coûts de formation, en réduisant le cache KV de 93,3 % et en augmentant le débit de génération maximal à 5,76 fois. DeepSeek est une entreprise explorant l'intelligence artificielle générale
 Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas entre officiellement dans l’ère des robots électriques ! Hier, l'Atlas hydraulique s'est retiré "en larmes" de la scène de l'histoire. Aujourd'hui, Boston Dynamics a annoncé que l'Atlas électrique était au travail. Il semble que dans le domaine des robots humanoïdes commerciaux, Boston Dynamics soit déterminé à concurrencer Tesla. Après la sortie de la nouvelle vidéo, elle a déjà été visionnée par plus d’un million de personnes en seulement dix heures. Les personnes âgées partent et de nouveaux rôles apparaissent. C'est une nécessité historique. Il ne fait aucun doute que cette année est l’année explosive des robots humanoïdes. Les internautes ont commenté : Les progrès des robots ont fait ressembler la cérémonie d'ouverture de cette année à des êtres humains, et le degré de liberté est bien plus grand que celui des humains. Mais n'est-ce vraiment pas un film d'horreur ? Au début de la vidéo, Atlas est allongé calmement sur le sol, apparemment sur le dos. Ce qui suit est à couper le souffle
 KAN, qui remplace MLP, a été étendu à la convolution par des projets open source
Jun 01, 2024 pm 10:03 PM
KAN, qui remplace MLP, a été étendu à la convolution par des projets open source
Jun 01, 2024 pm 10:03 PM
Plus tôt ce mois-ci, des chercheurs du MIT et d'autres institutions ont proposé une alternative très prometteuse au MLP – KAN. KAN surpasse MLP en termes de précision et d’interprétabilité. Et il peut surpasser le MLP fonctionnant avec un plus grand nombre de paramètres avec un très petit nombre de paramètres. Par exemple, les auteurs ont déclaré avoir utilisé KAN pour reproduire les résultats de DeepMind avec un réseau plus petit et un degré d'automatisation plus élevé. Plus précisément, le MLP de DeepMind compte environ 300 000 paramètres, tandis que le KAN n'en compte qu'environ 200. KAN a une base mathématique solide comme MLP est basé sur le théorème d'approximation universelle, tandis que KAN est basé sur le théorème de représentation de Kolmogorov-Arnold. Comme le montre la figure ci-dessous, KAN a
 L'IA bouleverse la recherche mathématique ! Le lauréat de la médaille Fields et mathématicien sino-américain a dirigé 11 articles les mieux classés | Aimé par Terence Tao
Apr 09, 2024 am 11:52 AM
L'IA bouleverse la recherche mathématique ! Le lauréat de la médaille Fields et mathématicien sino-américain a dirigé 11 articles les mieux classés | Aimé par Terence Tao
Apr 09, 2024 am 11:52 AM
L’IA change effectivement les mathématiques. Récemment, Tao Zhexuan, qui a prêté une attention particulière à cette question, a transmis le dernier numéro du « Bulletin de l'American Mathematical Society » (Bulletin de l'American Mathematical Society). En se concentrant sur le thème « Les machines changeront-elles les mathématiques ? », de nombreux mathématiciens ont exprimé leurs opinions. L'ensemble du processus a été plein d'étincelles, intense et passionnant. L'auteur dispose d'une équipe solide, comprenant Akshay Venkatesh, lauréat de la médaille Fields, le mathématicien chinois Zheng Lejun, l'informaticien de l'Université de New York Ernest Davis et de nombreux autres universitaires bien connus du secteur. Le monde de l’IA a radicalement changé. Vous savez, bon nombre de ces articles ont été soumis il y a un an.
 Google est ravi : les performances de JAX surpassent Pytorch et TensorFlow ! Cela pourrait devenir le choix le plus rapide pour la formation à l'inférence GPU
Apr 01, 2024 pm 07:46 PM
Google est ravi : les performances de JAX surpassent Pytorch et TensorFlow ! Cela pourrait devenir le choix le plus rapide pour la formation à l'inférence GPU
Apr 01, 2024 pm 07:46 PM
Les performances de JAX, promu par Google, ont dépassé celles de Pytorch et TensorFlow lors de récents tests de référence, se classant au premier rang sur 7 indicateurs. Et le test n’a pas été fait sur le TPU présentant les meilleures performances JAX. Bien que parmi les développeurs, Pytorch soit toujours plus populaire que Tensorflow. Mais à l’avenir, des modèles plus volumineux seront peut-être formés et exécutés sur la base de la plate-forme JAX. Modèles Récemment, l'équipe Keras a comparé trois backends (TensorFlow, JAX, PyTorch) avec l'implémentation native de PyTorch et Keras2 avec TensorFlow. Premièrement, ils sélectionnent un ensemble de
 Les robots Tesla travaillent dans les usines, Musk : Le degré de liberté des mains atteindra 22 cette année !
May 06, 2024 pm 04:13 PM
Les robots Tesla travaillent dans les usines, Musk : Le degré de liberté des mains atteindra 22 cette année !
May 06, 2024 pm 04:13 PM
La dernière vidéo du robot Optimus de Tesla est sortie, et il peut déjà fonctionner en usine. À vitesse normale, il trie les batteries (les batteries 4680 de Tesla) comme ceci : Le responsable a également publié à quoi cela ressemble à une vitesse 20 fois supérieure - sur un petit "poste de travail", en sélectionnant et en sélectionnant et en sélectionnant : Cette fois, il est publié L'un des points forts de la vidéo est qu'Optimus réalise ce travail en usine, de manière totalement autonome, sans intervention humaine tout au long du processus. Et du point de vue d'Optimus, il peut également récupérer et placer la batterie tordue, en se concentrant sur la correction automatique des erreurs : concernant la main d'Optimus, le scientifique de NVIDIA Jim Fan a donné une évaluation élevée : la main d'Optimus est l'un des robots à cinq doigts du monde. le plus adroit. Ses mains ne sont pas seulement tactiles
 FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
La détection de cibles est un problème relativement mature dans les systèmes de conduite autonome, parmi lesquels la détection des piétons est l'un des premiers algorithmes à être déployés. Des recherches très complètes ont été menées dans la plupart des articles. Cependant, la perception de la distance à l’aide de caméras fisheye pour une vue panoramique est relativement moins étudiée. En raison de la distorsion radiale importante, la représentation standard du cadre de délimitation est difficile à mettre en œuvre dans les caméras fisheye. Pour alléger la description ci-dessus, nous explorons les conceptions étendues de boîtes englobantes, d'ellipses et de polygones généraux dans des représentations polaires/angulaires et définissons une métrique de segmentation d'instance mIOU pour analyser ces représentations. Le modèle fisheyeDetNet proposé avec une forme polygonale surpasse les autres modèles et atteint simultanément 49,5 % de mAP sur l'ensemble de données de la caméra fisheye Valeo pour la conduite autonome.
 Une seule carte exécute Llama 70B plus rapidement que deux cartes, Microsoft vient de mettre le FP6 dans l'Open source A100 |
Apr 29, 2024 pm 04:55 PM
Une seule carte exécute Llama 70B plus rapidement que deux cartes, Microsoft vient de mettre le FP6 dans l'Open source A100 |
Apr 29, 2024 pm 04:55 PM
Le FP8 et la précision de quantification inférieure en virgule flottante ne sont plus le « brevet » du H100 ! Lao Huang voulait que tout le monde utilise INT8/INT4, et l'équipe Microsoft DeepSpeed a commencé à exécuter FP6 sur A100 sans le soutien officiel de NVIDIA. Les résultats des tests montrent que la quantification FP6 de la nouvelle méthode TC-FPx sur A100 est proche ou parfois plus rapide que celle de INT4, et a une précision supérieure à celle de cette dernière. En plus de cela, il existe également une prise en charge de bout en bout des grands modèles, qui ont été open source et intégrés dans des cadres d'inférence d'apprentissage profond tels que DeepSpeed. Ce résultat a également un effet immédiat sur l'accélération des grands modèles : dans ce cadre, en utilisant une seule carte pour exécuter Llama, le débit est 2,65 fois supérieur à celui des cartes doubles. un
