
 Périphériques technologiques
IA
D'un point de vue technique, parlons des raisons pour lesquelles les systèmes de conduite autonome binoculaires sont difficiles à populariser ?
Périphériques technologiques
IA
D'un point de vue technique, parlons des raisons pour lesquelles les systèmes de conduite autonome binoculaires sont difficiles à populariser ?
D'un point de vue technique, parlons des raisons pour lesquelles les systèmes de conduite autonome binoculaires sont difficiles à populariser ?

La vision monoculaire est l'arme magique de Mobileye (ME). En fait, elle avait aussi envisagé la vision binoculaire à l'époque, mais a finalement choisi d'abandonner.
Sur quoi reposent la télémétrie monoculaire et l'estimation 3D ? C'est la Bounding Box (BB) qui détecte la cible. Si l'obstacle ne peut pas être détecté, le système ne peut pas estimer sa distance et son attitude/orientation 3D. Sans apprentissage profond, ME estime principalement la distance en fonction du BB, de l'attitude et de la hauteur obtenues par calibrage de la caméra et de l'hypothèse selon laquelle la surface de la route est droite.
Avec l'apprentissage profond, le modèle NN peut être entraîné sur la base d'une vérité terrain en 3D pour obtenir des estimations de taille et d'attitude en 3D. La distance est basée sur le principe de la ligne parallèle. (vue unique) métrologie) obtenu. La solution monoculaire L3 annoncée par Baidu Apollo il n'y a pas longtemps est assez claire. L'article de référence est "3D Bounding Box Estimation by Deep Learning and Geometry". , la parallaxe et la profondeur peuvent être calculées même si aucun obstacle n'est détecté (en raison des informations de profondeur supplémentaires, le détecteur sera meilleur qu'un monoculaire), une alarme sera émise. Le problème est qu'il n'est pas si simple pour un système de vision binoculaire d'estimer la disparité. La correspondance stéréo est un problème typique en vision par ordinateur. Une ligne de base large donne des résultats précis pour les cibles lointaines, tandis qu'une ligne de base courte donne de bons résultats. près des cibles. Il y a un compromis ici.
Le système de vision binoculaire ADAS actuellement sur le marché est Subaru EyeSight, et ses performances seraient bonnes.
La navette Apollon L4 lancée par Baidu a été produite en série avec 100 unités installées, et un système binoculaire a été installé. Le projet de stationnement autonome de l'UE V-Charge utilise également un système de vision binoculaire avant, tout comme le système de recherche et développement de conduite autonome Berta Benz, qui est intégré au système radar. Parmi eux, l'algorithme de détection d'obstacles binoculaire Stixel est très célèbre. Des entreprises de premier plan telles que Bosch et Conti ont également développé des solutions de vision binoculaire dans le passé, mais celles-ci n'ont pas eu d'impact sur le marché et auraient été supprimées. 
En parlant des difficultés du système binoculaire, en plus de l'adaptation stéréo, il y a aussi l'étalonnage. Le système calibré « dérivera », un étalonnage en ligne est donc indispensable. Il en va de même pour les monoculaires, car la déformation des pneus et les chocs de la carrosserie du véhicule affecteront les changements des paramètres externes de la caméra, et certains paramètres doivent être calibrés et corrigés en ligne, tels que l'angle de tangage et l'angle de lacet.
L'étalonnage binoculaire en ligne est plus compliqué, car la correspondance binoculaire est simplifiée autant que possible en recherche 1D, de sorte que les axes optiques des deux lentilles doivent être parallélisés par rectification stéréo et perpendiculairement à la ligne de base. Par conséquent, par rapport au gain obtenu, les commerçants abandonneront si cela n’est pas rentable en raison de la complexité et du coût accrus.
La vision binoculaire a été à nouveau mentionnée récemment car Ambarella, une société de puces de la Silicon Valley, a acquis Vis Lab de l'Université de Parme en Italie en 2014 et a développé des ADAS et des binoculaires. les puces de conduite autonome, qui ont commencé à entrer dans les constructeurs automobiles et de niveau 1 après le CES l'année dernière. De plus, Ambarella poursuit actuellement ses recherches pour améliorer les performances du système.
L'image ci-dessous est un diagramme schématique de six paires de systèmes de vision stéréo installés sur le toit de la voiture. Leurs largeurs de base peuvent être différentes, ainsi que les distances de détection efficaces. sera différent en conséquence. L'auteur a déjà fait un tour dans sa voiture autonome et pouvait voir à 200 mètres de distance et à 20-30 mètres de distance. Il peut en effet effectuer un calibrage en ligne et ajuster certains paramètres de vision binoculaire à tout moment.
01 Correspondance stéréo 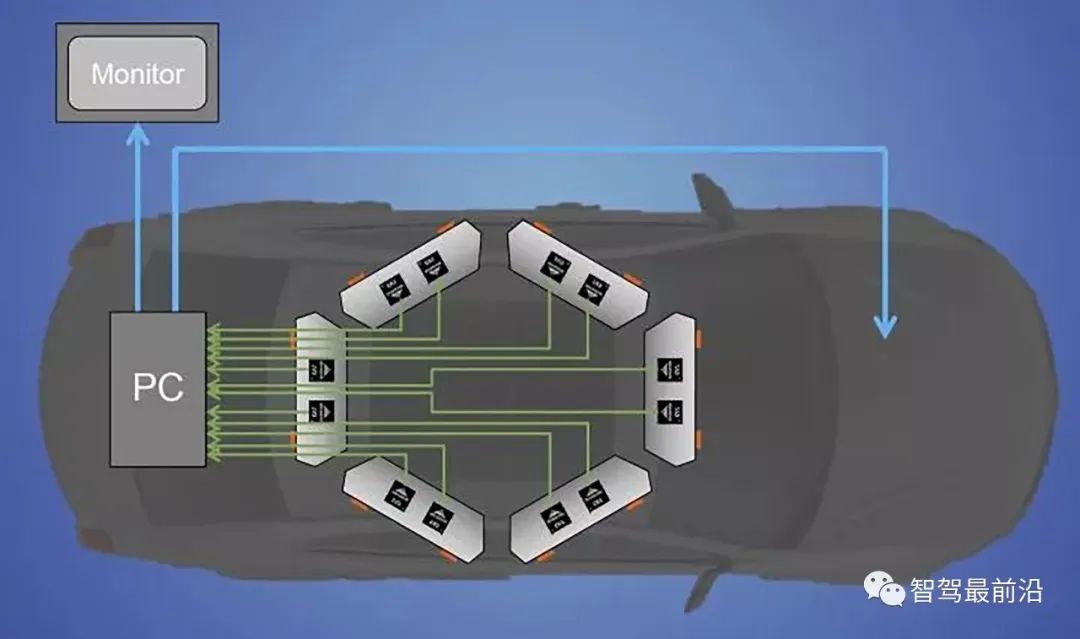
Parlons de Correspondance stéréo en premier, c'est-à-dire estimation de disparité/profondeur. Comme le montre la figure, supposons que la distance focale des caméras gauche et droite est f, la largeur de la ligne de base (la ligne reliant les deux centres optiques) est B, la profondeur du point 3D 🎜##🎜🎜 #
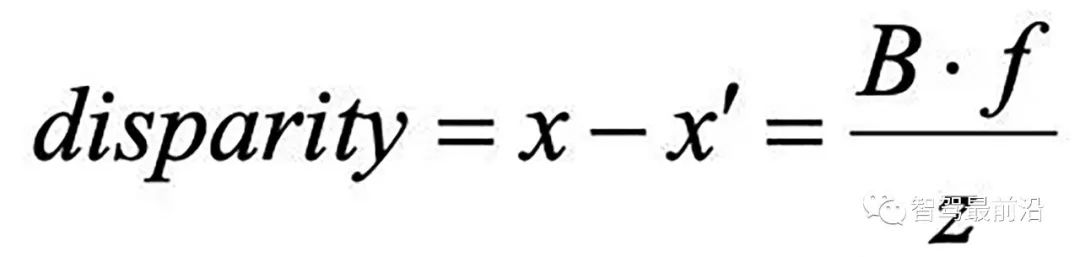 La parallaxe visible peut calculer inversement la valeur de profondeur. Mais le plus difficile ici est de savoir comment déterminer que les images vues par les objectifs gauche et droit sont la même cible, c'est-à-dire le problème de correspondance.
La parallaxe visible peut calculer inversement la valeur de profondeur. Mais le plus difficile ici est de savoir comment déterminer que les images vues par les objectifs gauche et droit sont la même cible, c'est-à-dire le problème de correspondance.
Il existe deux méthodes de correspondance, la méthode globale et la méthode locale. Il y a quatre étapes dans la correspondance binoculaire :
- calcul/optimisation du coût de parallaxe ;
- correction des disparités (raffinement).
- La méthode locale la plus connue est la SGM (semi-global matching). Les méthodes utilisées par de nombreux produits sont basées sur cette amélioration, et de nombreuses puces de vision utilisent cet algorithme.
- SGM consiste à approximer une optimisation globale en une combinaison de plusieurs problèmes d'optimisation locaux. La formule suivante est la fonction objectif d'optimisation de la correspondance 2D qui est implémentée comme la somme de plusieurs chemins d'optimisation 1D
.
L'image ci-dessous est la fonction d'optimisation du chemin dans la direction horizontale

Census Transform convertit les pixels 8/24 bits en une séquence binaire. Une autre fonctionnalité binaire est appelée LBP (modèle binaire local) et c'est. similaire. L'algorithme de correspondance stéréo est basé sur cette transformation et transforme la correspondance en une recherche de minimisation de la distance de Hamming. RealSense d'Intel a acquis une start-up de vision binoculaire fondée en 1994 sur la base de cette technologie, et a également acquis plusieurs autres petites entreprises et les a combinées pour la créer.
La figure suivante est un diagramme schématique de la transformation CS : 
PatchMatch est un algorithme qui accélère la correspondance de modèles d'image et est utilisé dans le calcul du flux optique et l'estimation de la disparité. Microsoft Research a déjà réalisé un projet basé sur la reconstruction 3D d'une caméra monoculaire de téléphone portable, imitant le succès précédent KinectFusion basé sur l'algorithme RVB-D, avec un nom similaire à MonoFusion, dans lequel l'estimation de la carte de profondeur utilise une méthode PatchMatch modifiée. .
L'idée de base est d'initialiser de manière aléatoire les paramètres de disparité et de plan, puis de mettre à jour l'estimation via la propagation des informations entre pixels voisins. L'algorithme PM est divisé en cinq étapes : 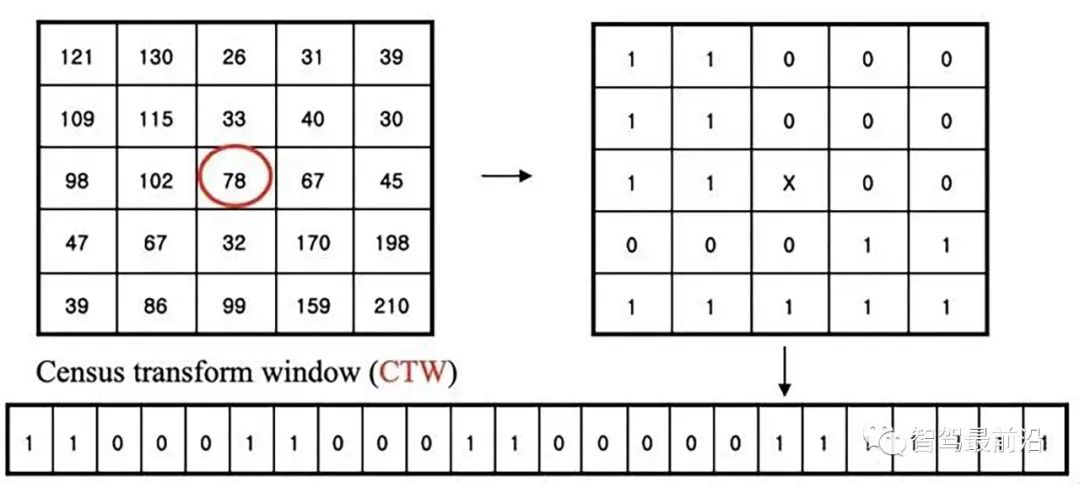
1) Propagation spatiale : chaque pixel vérifie la disparité et les paramètres de plan des voisins gauche et supérieur, et remplace l'estimation actuelle si le coût de correspondance devient plus petit
; 2) Propagation de la vue : transformez les pixels d'autres vues, vérifiez l'estimation de l'image correspondante, et remplacez-la si elle devient plus petite
- 3) Propagation temporelle : considérez l'estimation du pixel correspondant dans les images précédentes et suivantes ;
- 4) Affinement du plan : générez de manière aléatoire des échantillons et mettez à jour si estimé pour réduire le coût de correspondance.
- 5) Post-traitement : cohérence gauche-droite et filtre médian pondéré pour supprimer les valeurs aberrantes.
- L'image suivante est un diagramme schématique de PM :
- 02 Calibrage en ligne
Parlons de l'étalonnage en ligne.
Il s'agit d'une méthode d'étalonnage qui utilise le marquage routier (passages piétons) : le motif de lignes parallèles du passage piétons est connu, le passage piétons est détecté et les points d'angle sont extraits, et les paramètres de transformation d'homographie (homographie) pour la correspondance du motif du passage piéton et de la surface de la route est calculée. Obtenez les paramètres d'étalonnage.
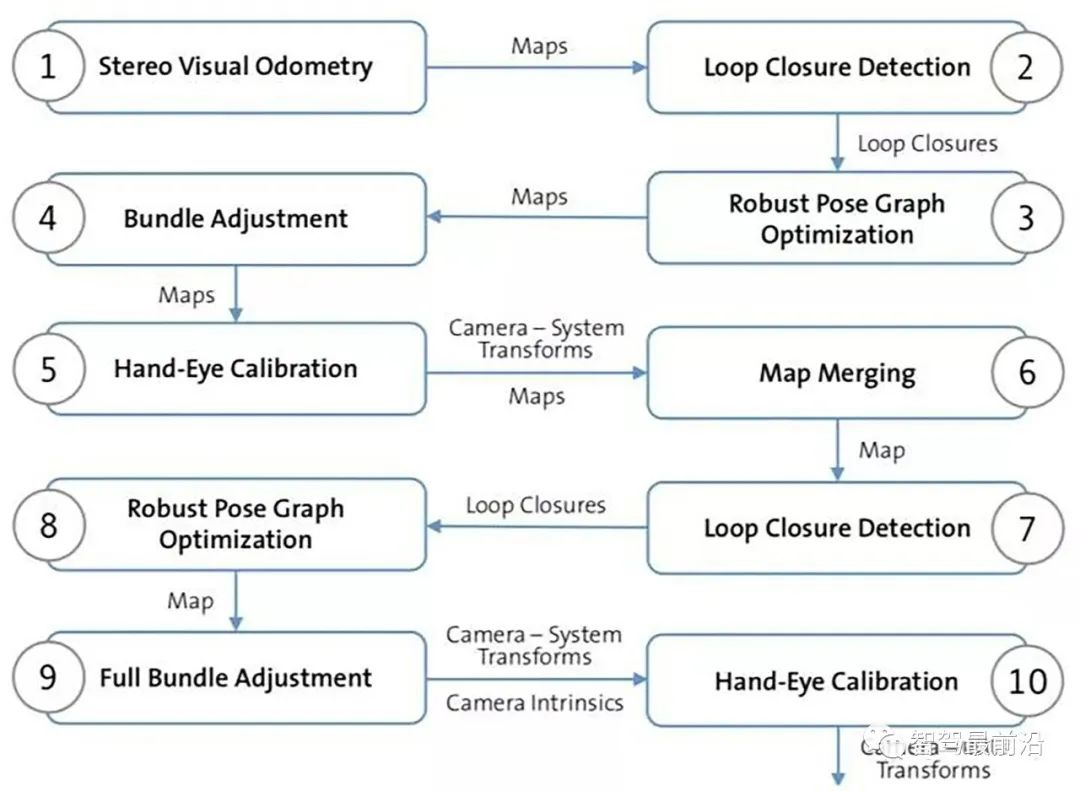
L'autre méthode est basée sur VO et SLAM, ce qui est plus compliqué, mais elle peut effectuer un positionnement basé sur une carte en même temps. L'utilisation de SLAM pour l'étalonnage en ligne n'est pas adaptée aux opérations à haute fréquence. La figure suivante est l'organigramme de son algorithme : Étapes 1 à 4, obtenez la carte continue globale via la vision stéréo SLAM. L'étape 5 donne l'estimation initiale de la caméra binoculaire ; transformation, étape 6 Regroupez les cartes de toutes les caméras stéréo en une seule carte ; obtenez les poses entre plusieurs caméras aux étapes 7 et 8.
Semblable à la méthode monoculaire, l'étalonnage en ligne peut être rapidement effectué en utilisant l'hypothèse que les lignes de voie sont parallèles et que la route est plate, c'est-à-dire la théorie du point de fuite : en supposant un modèle de route plate, des lignes de voie longitudinales claires, et aucun autre. Les bords de la cible leur sont parallèles ; la vitesse de conduite doit être lente, les lignes de voie sont continues et la configuration binoculaire des caméras gauche et droite nécessite que les angles d'élévation/roulis (angles de lacet/roulis) ) de la caméra gauche par rapport à la surface de la route sont relativement petits ; cela est cohérent avec la comparaison du point de fuite initialisé (avec corrélation d'étalonnage hors ligne) qui permet de calculer la quantité de dérive des paramètres externes binoculaires (Figure 5-269). l'élévation/l'angle oblique de la caméra à partir du point de fuite.

03 Système de conduite autonome binoculaire typique
Ce qui suit présente plusieurs systèmes de conduite autonome binoculaire typiques.
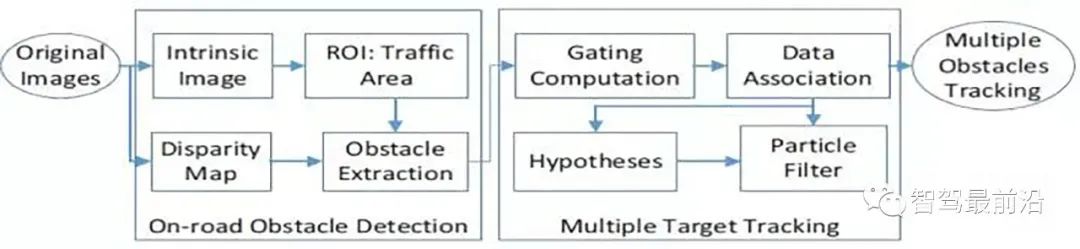
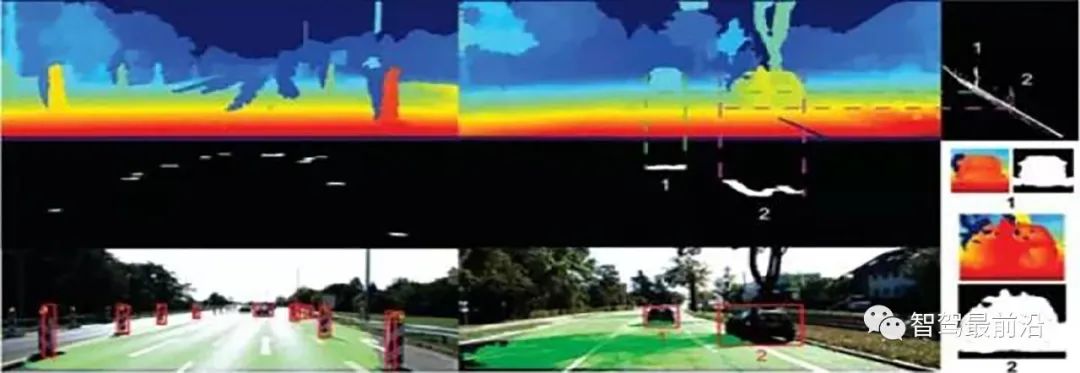
L'algorithme de détection d'obstacles Stixel adopté par Berta Benz est basé sur les hypothèses suivantes : les cibles de la scène sont décrites comme des colonnes, le centre de gravité fait que la cible se tient au sol, et la partie supérieure sur chaque cible est plus profonde que la partie inférieure. La figure suivante (a-d) présente comment les résultats de disparité SGM génèrent les résultats de segmentation Stixel :
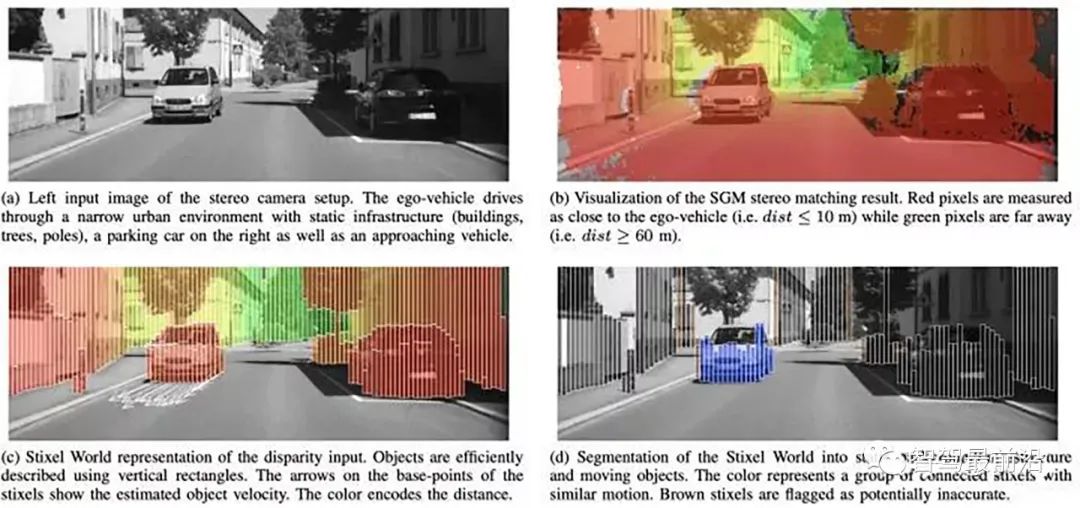
La figure suivante est un diagramme schématique du calcul de Stixels : (a) Calcul de l'espace de conduite libre basé sur la programmation dynamique (b) Attributs dans Valeurs de segmentation en hauteur (c) Image de coût (valeurs en niveaux de gris inversées) (d) Segmentation en hauteur.
Voici le schéma fonctionnel et les nouveaux résultats de Stixel après avoir ajouté l'apprentissage en profondeur pour effectuer la fusion de parallaxe :

Présentation d'un premier algorithme d'obstacle binoculaire de VisLab, du système générique de détection d'obstacles et de voie (GOLD). Basé sur l'IPM (Inverse Perspective Mapping), détectez les lignes de voie et calculez les obstacles sur la route en fonction de la différence entre les images gauche et droite :

(a) Gauche (b) Droite (c) Remappé. gauche. (d) Remappé à droite. (e) Différence seuillée et filtrée entre les vues remappées. (f) En gris clair, la zone routière visible depuis les deux caméras.
(a) Original (b) Remappé. (c) Filtré. (d) Amélioré. (e) Binarisé.
Architecture du système GOLD
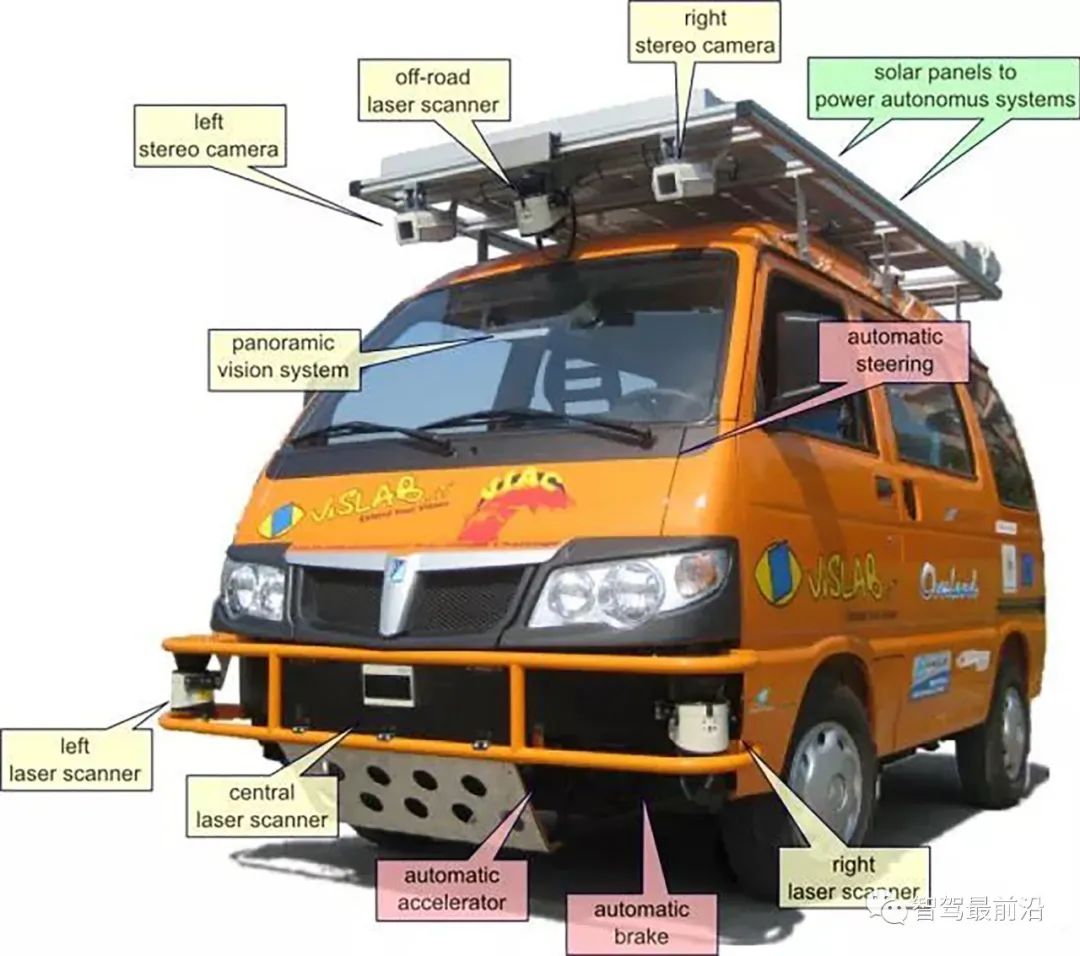
Il s'agit du véhicule de VisLab participant au concours de conduite autonome VIAC (VisLab Intercontinental Autonomous Challenge). des caméras binoculaires, il y a aussi un laser sur le radar du véhicule pour aider au classement des routes.
Voici son organigramme de détection d'obstacles binoculaires : l'estimation de la disparité utilise l'algorithme SGM et les algorithmes associés basés sur SAD.

Deux filtres spatiaux DSI (Disparity Space Image) sont ajoutés au post-traitement, voir Figure 5-274. L'un est le traitement de lissage et l'autre est le traitement de trajectoire de mouvement basé sur la navigation inertielle (IMU).

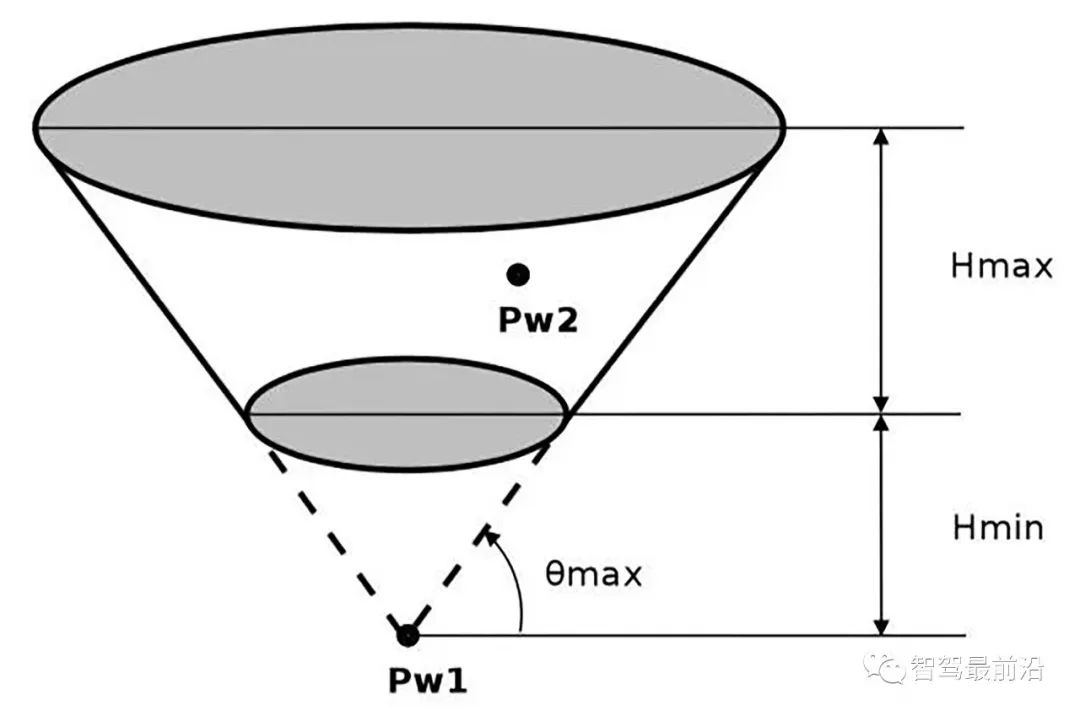
L'algorithme de détection d'obstacles utilise la méthode JPL pour regrouper les obstacles en fonction des caractéristiques de disposition spatiale et des caractéristiques physiques du véhicule. Les caractéristiques physiques incluent la hauteur maximale (véhicule), la hauteur minimale (obstacle) et la portée maximale praticable de la route. Ces contraintes définissent un espace tronc de cône (tronc de cône), comme le montre la figure, puis dans le processus de clustering, tout tombe. Les points situés à l'intérieur du cône tronqué sont désignés comme des obstacles.
Afin d'accélérer l'algorithme d'estimation de la disparité, la méthode de division du DSI est adoptée :
# 🎜🎜#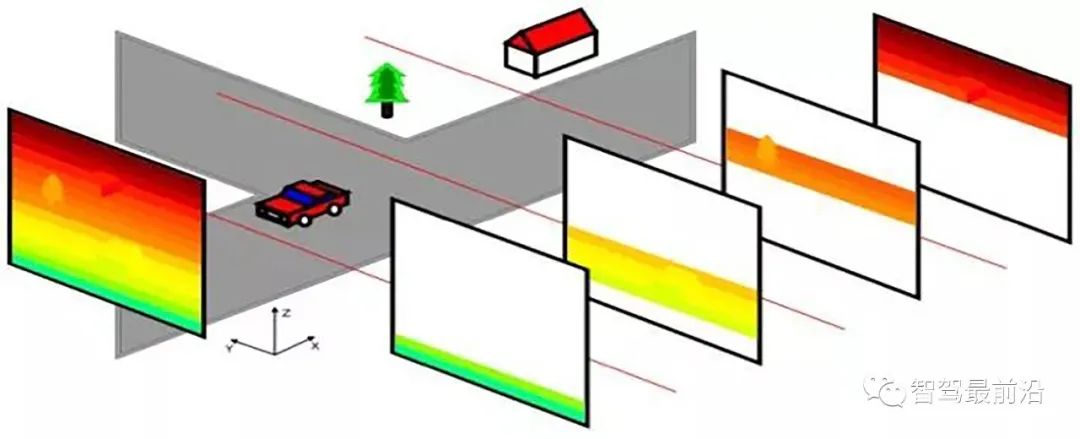
Une autre méthode classique consiste à obtenir la parallaxe de la route à partir de l'équation de la route (vision stéréo), et à calculer les obstacles sur la route basé sur ceci :
04 Résumé #🎜🎜 #
En général, la méthode de détection binoculaire des obstacles repose essentiellement sur des cartes de disparité, et il existe de nombreuses méthodes basées sur la parallaxe routière. Peut-être qu’avec le développement rapide de l’apprentissage profond et l’amélioration des plates-formes informatiques, les systèmes de conduite autonome binoculaires deviendront également populaires.Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds
 1359
1359
 52
52

 La multiplication matricielle universelle de CUDA : de l'entrée à la maîtrise !
Mar 25, 2024 pm 12:30 PM
La multiplication matricielle universelle de CUDA : de l'entrée à la maîtrise !
Mar 25, 2024 pm 12:30 PM
La multiplication matricielle générale (GEMM) est un élément essentiel de nombreuses applications et algorithmes, et constitue également l'un des indicateurs importants pour évaluer les performances du matériel informatique. Une recherche approfondie et l'optimisation de la mise en œuvre de GEMM peuvent nous aider à mieux comprendre le calcul haute performance et la relation entre les systèmes logiciels et matériels. En informatique, une optimisation efficace de GEMM peut augmenter la vitesse de calcul et économiser des ressources, ce qui est crucial pour améliorer les performances globales d’un système informatique. Une compréhension approfondie du principe de fonctionnement et de la méthode d'optimisation de GEMM nous aidera à mieux utiliser le potentiel du matériel informatique moderne et à fournir des solutions plus efficaces pour diverses tâches informatiques complexes. En optimisant les performances de GEMM
 Le système de conduite intelligent Qiankun ADS3.0 de Huawei sera lancé en août et sera lancé pour la première fois sur Xiangjie S9
Jul 30, 2024 pm 02:17 PM
Le système de conduite intelligent Qiankun ADS3.0 de Huawei sera lancé en août et sera lancé pour la première fois sur Xiangjie S9
Jul 30, 2024 pm 02:17 PM
Le 29 juillet, lors de la cérémonie de lancement de la 400 000e nouvelle voiture d'AITO Wenjie, Yu Chengdong, directeur général de Huawei, président de Terminal BG et président de la BU Smart Car Solutions, a assisté et prononcé un discours et a annoncé que les modèles de la série Wenjie seraient sera lancé cette année En août, la version Huawei Qiankun ADS 3.0 a été lancée et il est prévu de pousser successivement les mises à niveau d'août à septembre. Le Xiangjie S9, qui sortira le 6 août, lancera le système de conduite intelligent ADS3.0 de Huawei. Avec l'aide du lidar, la version Huawei Qiankun ADS3.0 améliorera considérablement ses capacités de conduite intelligente, disposera de capacités intégrées de bout en bout et adoptera une nouvelle architecture de bout en bout de GOD (identification générale des obstacles)/PDP (prédictive prise de décision et contrôle), fournissant la fonction NCA de conduite intelligente d'une place de stationnement à l'autre et mettant à niveau CAS3.0
 Au-delà d'ORB-SLAM3 ! SL-SLAM : les scènes de faible luminosité, de gigue importante et de texture faible sont toutes gérées
May 30, 2024 am 09:35 AM
Au-delà d'ORB-SLAM3 ! SL-SLAM : les scènes de faible luminosité, de gigue importante et de texture faible sont toutes gérées
May 30, 2024 am 09:35 AM
Écrit précédemment, nous discutons aujourd'hui de la manière dont la technologie d'apprentissage profond peut améliorer les performances du SLAM (localisation et cartographie simultanées) basé sur la vision dans des environnements complexes. En combinant des méthodes d'extraction de caractéristiques approfondies et de correspondance de profondeur, nous introduisons ici un système SLAM visuel hybride polyvalent conçu pour améliorer l'adaptation dans des scénarios difficiles tels que des conditions de faible luminosité, un éclairage dynamique, des zones faiblement texturées et une gigue importante. Notre système prend en charge plusieurs modes, notamment les configurations étendues monoculaire, stéréo, monoculaire-inertielle et stéréo-inertielle. En outre, il analyse également comment combiner le SLAM visuel avec des méthodes d’apprentissage profond pour inspirer d’autres recherches. Grâce à des expériences approfondies sur des ensembles de données publiques et des données auto-échantillonnées, nous démontrons la supériorité du SL-SLAM en termes de précision de positionnement et de robustesse du suivi.
 Quelle version du système Apple 16 est la meilleure ?
Mar 08, 2024 pm 05:16 PM
Quelle version du système Apple 16 est la meilleure ?
Mar 08, 2024 pm 05:16 PM
La meilleure version du système Apple 16 est iOS16.1.4. La meilleure version du système iOS16 peut varier d'une personne à l'autre. Les ajouts et améliorations de l'expérience d'utilisation quotidienne ont également été salués par de nombreux utilisateurs. Quelle version du système Apple 16 est la meilleure ? Réponse : iOS16.1.4 La meilleure version du système iOS 16 peut varier d'une personne à l'autre. Selon les informations publiques, iOS16, lancé en 2022, est considéré comme une version très stable et performante, et les utilisateurs sont plutôt satisfaits de son expérience globale. De plus, l'ajout de nouvelles fonctionnalités et les améliorations de l'expérience d'utilisation quotidienne dans iOS16 ont également été bien accueillies par de nombreux utilisateurs. Surtout en termes de durée de vie de la batterie mise à jour, de performances du signal et de contrôle du chauffage, les retours des utilisateurs ont été relativement positifs. Cependant, compte tenu de l'iPhone14
 Toujours nouveau ! Mises à niveau de la série Huawei Mate60 vers HarmonyOS 4.2 : amélioration du cloud AI, le dialecte Xiaoyi est si facile à utiliser
Jun 02, 2024 pm 02:58 PM
Toujours nouveau ! Mises à niveau de la série Huawei Mate60 vers HarmonyOS 4.2 : amélioration du cloud AI, le dialecte Xiaoyi est si facile à utiliser
Jun 02, 2024 pm 02:58 PM
Le 11 avril, Huawei a officiellement annoncé pour la première fois le plan de mise à niveau de 100 machines HarmonyOS 4.2. Cette fois, plus de 180 appareils participeront à la mise à niveau, couvrant les téléphones mobiles, les tablettes, les montres, les écouteurs, les écrans intelligents et d'autres appareils. Au cours du mois dernier, avec la progression constante du plan de mise à niveau de 100 machines HarmonyOS4.2, de nombreux modèles populaires, notamment Huawei Pocket2, la série Huawei MateX5, la série nova12, la série Huawei Pura, etc., ont également commencé à être mis à niveau et à s'adapter, ce qui signifie qu'il y aura davantage d'utilisateurs de modèles Huawei pourront profiter de l'expérience commune et souvent nouvelle apportée par HarmonyOS. À en juger par les commentaires des utilisateurs, l'expérience des modèles de la série Huawei Mate60 s'est améliorée à tous égards après la mise à niveau d'HarmonyOS4.2. Surtout Huawei M
 La première reconstruction purement visuelle et statique de la conduite autonome
Jun 02, 2024 pm 03:24 PM
La première reconstruction purement visuelle et statique de la conduite autonome
Jun 02, 2024 pm 03:24 PM
Une solution d'annotation purement visuelle utilise principalement la vision ainsi que certaines données du GPS, de l'IMU et des capteurs de vitesse de roue pour l'annotation dynamique. Bien entendu, pour les scénarios de production de masse, il n’est pas nécessaire qu’il s’agisse d’une vision pure. Certains véhicules produits en série seront équipés de capteurs comme le radar à semi-conducteurs (AT128). Si nous créons une boucle fermée de données dans la perspective d'une production de masse et utilisons tous ces capteurs, nous pouvons résoudre efficacement le problème de l'étiquetage des objets dynamiques. Mais notre plan ne prévoit pas de radar à semi-conducteurs. Par conséquent, nous présenterons cette solution d’étiquetage de production de masse la plus courante. Le cœur d’une solution d’annotation purement visuelle réside dans la reconstruction de pose de haute précision. Nous utilisons le schéma de reconstruction de pose de Structure from Motion (SFM) pour garantir la précision de la reconstruction. Mais passe
 Quels sont les systèmes d'exploitation informatiques ?
Jan 12, 2024 pm 03:12 PM
Quels sont les systèmes d'exploitation informatiques ?
Jan 12, 2024 pm 03:12 PM
Un système d'exploitation informatique est un système utilisé pour gérer du matériel informatique et des logiciels. C'est également un programme de système d'exploitation développé sur la base de tous les systèmes logiciels. Alors, quels sont les systèmes informatiques ? Ci-dessous, l'éditeur partagera avec vous ce que sont les systèmes d'exploitation informatiques. Le soi-disant système d'exploitation consiste à gérer le matériel informatique et les logiciels. Tous les logiciels sont développés sur la base des programmes du système d'exploitation. En fait, il existe de nombreux types de systèmes d’exploitation, notamment ceux à usage industriel, commercial et personnel, couvrant un large éventail d’applications. Ci-dessous, l'éditeur vous expliquera ce que sont les systèmes d'exploitation informatiques. Quels systèmes d'exploitation informatiques sont les systèmes Windows ? Le système Windows est un système d'exploitation développé par Microsoft Corporation des États-Unis. que le plus
 Explication détaillée de la façon de modifier la date système dans la base de données Oracle
Mar 09, 2024 am 10:21 AM
Explication détaillée de la façon de modifier la date système dans la base de données Oracle
Mar 09, 2024 am 10:21 AM
Explication détaillée de la méthode de modification de la date système dans la base de données Oracle. Dans la base de données Oracle, la méthode de modification de la date système consiste principalement à modifier le paramètre NLS_DATE_FORMAT et à utiliser la fonction SYSDATE. Cet article présentera en détail ces deux méthodes et leurs exemples de code spécifiques pour aider les lecteurs à mieux comprendre et maîtriser l'opération de modification de la date système dans la base de données Oracle. 1. Modifier la méthode du paramètre NLS_DATE_FORMAT NLS_DATE_FORMAT correspond aux données Oracle
