
 Périphériques technologiques
IA
Top numéro publié ! L'équipe du professeur Li Yibin de l'Université du Shandong a développé un robot composite à pattes de roue simple et très maniable
Périphériques technologiques
IA
Top numéro publié ! L'équipe du professeur Li Yibin de l'Université du Shandong a développé un robot composite à pattes de roue simple et très maniable
Top numéro publié ! L'équipe du professeur Li Yibin de l'Université du Shandong a développé un robot composite à pattes de roue simple et très maniable

Les êtres humains rêvent depuis l’Antiquité de développer des mécanismes mobiles capables de s’adapter à une variété de terrains sauvages. Plate-forme mobile à rouesa une bonne stabilité de mouvement et une bonne efficacité de mouvement, mais il est difficile de voyager sur un terrain accidenté ; Robot à pattes et à pattesa une bonne adaptabilité au terrain et une bonne flexibilité de mouvement, mais sa stabilité de mouvement et son efficacité énergétique doivent être améliorées.
Afin de combiner les avantages du mouvement de la roue et du mouvement des jambes et des pieds, le mécanisme de mouvement composé roue-jambe est né. Les mécanismes composites courants de roues et de jambes comprennent principalement des roues de forme spéciale (telles que RHex), des roues à rayons (telles que Whegs), des roues déformées (telles que OmniWheg), des jambes de roue en série (telles que Wheeled-ANYmal), etc. comme le montre la figure X.
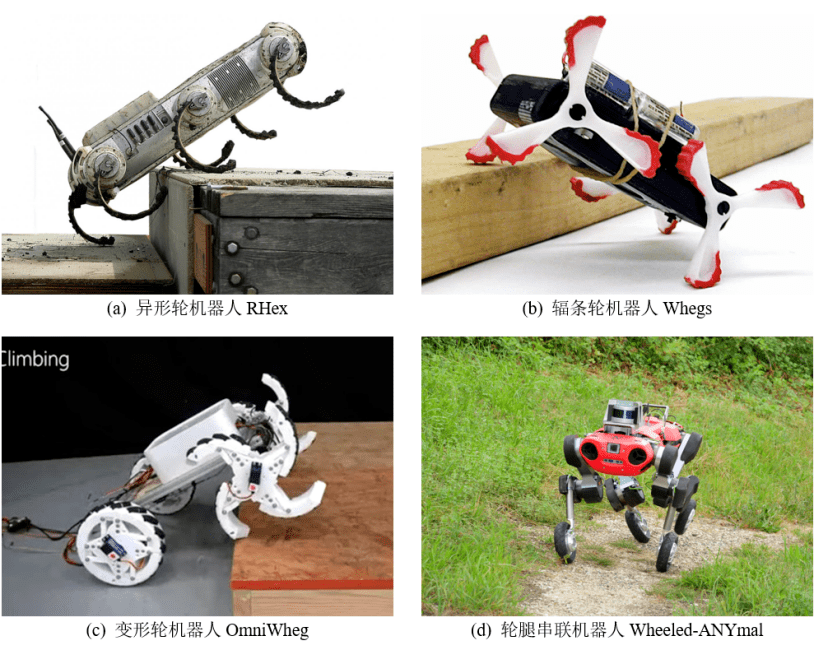
Figure 1 Robot composite commun à pattes de roue
Récemment, l'équipe du professeur Li Yibin de l'Université du Shandong, du professeur Ma Shugen de l'Université Ritsumeikan, Japon, du professeur Liu Jinguo de l'Institut d'automatisation de Shenyang, Académie chinoise des sciences, et du chercheur associé Kong Lingyu du laboratoire Zhijiang, a développé un nouveau type d'un robot composite à pattes de roue, nommé Q-Whex,Comme le montre la figure 2.
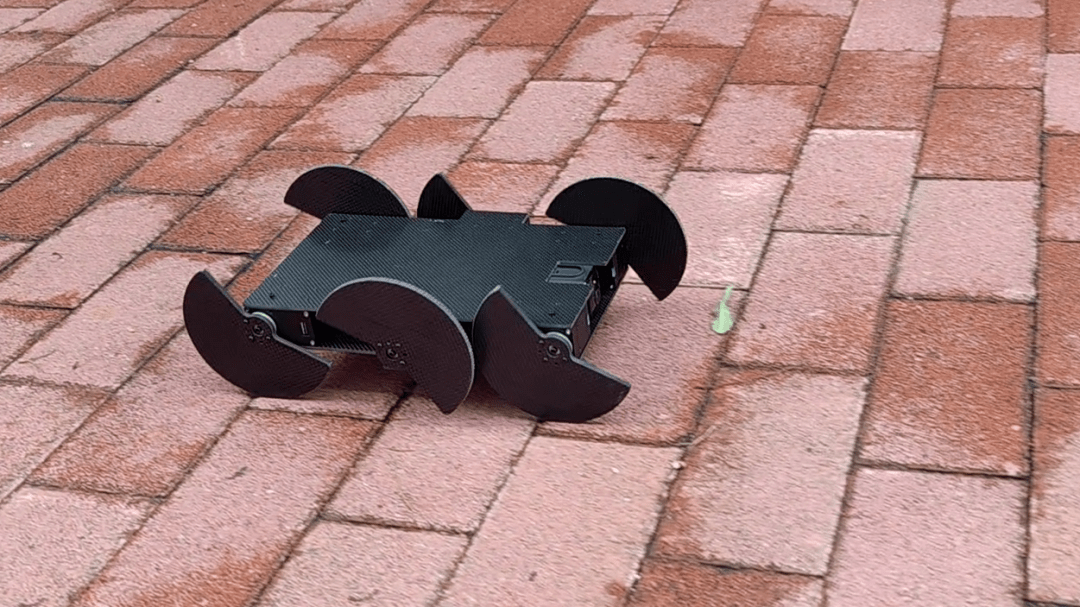
Photo 2 Robot Q-Whex
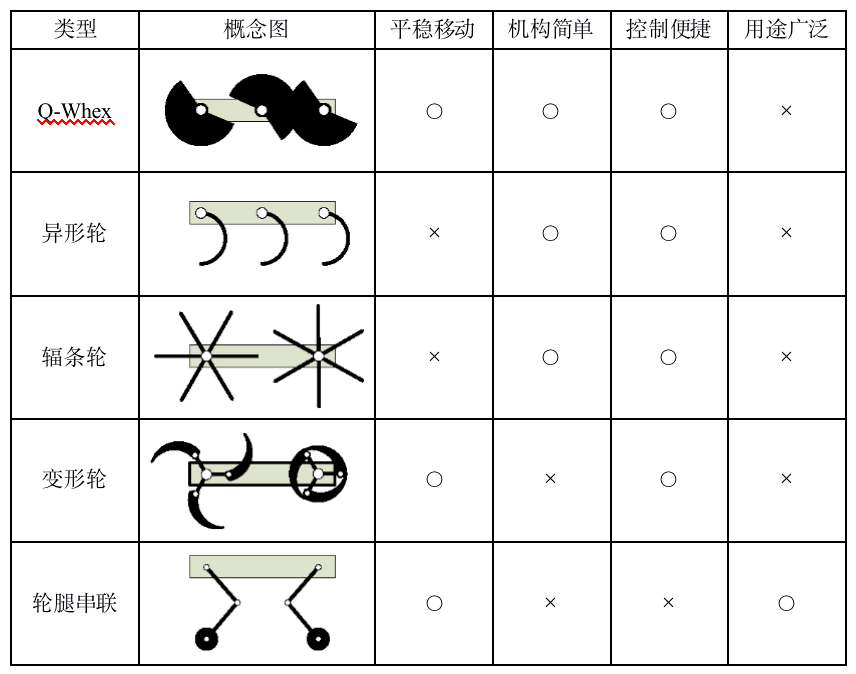
Q-Whex peut se déplacer en douceur sur un sol plat comme une plate-forme mobile à roues, et peut également franchir des obstacles plus hauts que la hauteur de son châssis comme un robot à pieds. Comparé à d'autres robots mobiles composites à pattes de roue, Q-Whex présente des avantages en termes de fluidité de mouvement, de complexité de mécanisme et de difficulté de contrôle, comme le montre le tableau 1.
Tableau 1 Comparaison entre Q-Whex et d'autres types de robots mobiles composites à pattes de roue
Ce travail a été publié dans le Journal of Field Robotics sous le titre « Q-Whex : A simple and very mobile quasi-wheeled hexapod robot ».
▍Mécanisme simple et contrôle pratique
Le robot Q-Whex présenté dans le document mesure 277,5 mm de long, 204,8 mm de large, 39,5 mm de haut, a un poids mort de 2,4 kg et peut atteindre une vitesse d'avancement de 0,44 m/s avec une charge de 2,65 kg. Q-Whex se compose d'un corps principal et de six systèmes de transmission à demi-roues isomorphes en forme de secteur. Le circuit de commande, l'IMU, la batterie et la caméra sont intégrés à l'intérieur du torse. Le moteur d'entraînement de la structure des pattes de roue est également placé à l'intérieur du torse. Chaque demi-roue a une structure en forme d'éventail à 210° et l'arbre de sortie du moteur. est connecté au centre du ventilateur pour obtenir une rotation. Lorsque le bord en forme d'éventail touche le sol, il s'agit d'un mouvement de roue. Lorsque le bord en forme d'éventail touche le sol, l'effet de dépassement d'obstacle de type jambe peut être obtenu.
La production et l'assemblage de Q-Whex sont très simples, comme le montre la figure 3. Les composants à l'intérieur du moteur et du torse sont installés entre deux plaques en fibre de carbone, et chaque demi-roue de secteur est également constituée de plaques en fibre de carbone.

Figure 3 Q-Whex vue éclatée
Le contrôle du mouvement de Q-Whex est également très simple. Chaque demi-roue en forme de secteur tourne en continu. La direction peut être obtenue en contrôlant la différence de vitesse entre la demi-roue en forme de secteur gauche et la demi-roue en forme de secteur droit. du robot. En contrôlant l'angle de rotation entre chaque demi-roue en forme de secteur, la différence de phase peut générer des allures différentes. La figure 4 montre les quatre allures typiques de Q-Whex.
Figure 4 Affichage de la démarche typique de Q-Whex
▍Combinaison roue et jambe, grimper et surmonter les obstacles
Q-Whex adopte une démarche triangulaire et peut se déplacer en douceur sur un sol plat comme une plate-forme mobile à roues, comme le montre la figure 5.

Figure 5 Q-Whex se déplace en douceur sur un terrain plat
Q-Whex peut également facilement gérer la neige, la glace, le gravier et d'autres surfaces, comme le montre la figure 6.

Figure 6 Q-Whex fonctionne sur une variété de surfaces
En utilisant une démarche symétrique, vous pouvez monter et descendre une pente de 32 degrés, comme le montre la figure 7.

Figure 7 Q-Whex sur une pente de 32 degrés
Peut monter des marches continues, comme le montre la figure 8.
Image 8 Marches continues d'escalade Q-Whex
Différents terrains accidentés ne posent pas de problème, comme le montre la figure 9.
Figure 9 Q-Whex fonctionnant sur un terrain accidenté
▍Configuration symétrique, aucune crainte de renversement
Étant donné que la conception structurelle du robot Q-Whex adopte une configuration symétrique dans les trois directions avant et arrière, gauche et droite, et haut et bas, il n'y a aucune différence entre l'avant et l'arrière et l'avant et l'arrière lors de son mouvement. Lorsque le robot se renverse accidentellement pendant la conduite, il peut continuer à avancer dans la configuration « à l'envers », bénéficiant ainsi d'une excellente assurance et d'une excellente tolérance aux pannes pour les risques et les accidents dans les mouvements dans un environnement complexe. La figure 10 montre que le robot s'est renversé pendant le processus d'ascension, puis a terminé l'ascension dans une posture de « secours ».
Image 10 Q-Whex peut continuer à rouler après un retournement
▍Caméra embarquée, détection à distance
Un petit équipement caméra a été installé sur le robot Q-Whex et peut transmettre les images collectées à l'opérateur distant en temps réel via WiFi ou réseau 4G. Par conséquent, Q-Whex peut effectuer des tâches de détection sans pilote, comme le montre la figure 11.
Figure 11 Q-Whex peut utiliser des caméras embarquées pour la détection à distance
Vous pouvez également taquiner le chat à distance, comme le montre la figure 12.
Image 12 Q-Whex et chat
Q-Whex est essentiellement un nouveau concept de mobilité composite roue-jambe. Sa grande maniabilité et sa forte praticabilité sont dérivées de la rotation continue et de la coordination de phase mutuelle de six demi-roues en forme de secteur entraînées indépendamment. Ce concept peut être appliqué aux plates-formes mobiles nécessaires aux inspections industrielles, au transport logistique, à la détection sur le terrain, etc. La configuration et la taille appropriées doivent être sélectionnées en fonction des exigences réelles de l'application. Le robot n'a pas besoin d'adopter des stratégies complexes de perception ou de contrôle, et sa simplicité de structure et de contrôle améliore la robustesse et la fiabilité du système.
Le premier auteur de l'article est le chercheur associé Zhang Guoteng de l'Université du Shandong, email :
guoteng@email.sdu.edu.cn.
Lien papier :
https://doi.org/10.1002/rob.22186
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 L'Ameca deuxième génération est là ! Il peut communiquer couramment avec le public, ses expressions faciales sont plus réalistes et il peut parler des dizaines de langues.
Mar 04, 2024 am 09:10 AM
L'Ameca deuxième génération est là ! Il peut communiquer couramment avec le public, ses expressions faciales sont plus réalistes et il peut parler des dizaines de langues.
Mar 04, 2024 am 09:10 AM
Le robot humanoïde Ameca est passé à la deuxième génération ! Récemment, lors de la Conférence mondiale sur les communications mobiles MWC2024, le robot le plus avancé au monde, Ameca, est à nouveau apparu. Autour du site, Ameca a attiré un grand nombre de spectateurs. Avec la bénédiction de GPT-4, Ameca peut répondre à divers problèmes en temps réel. "Allons danser." Lorsqu'on lui a demandé si elle avait des émotions, Ameca a répondu avec une série d'expressions faciales très réalistes. Il y a quelques jours à peine, EngineeredArts, la société britannique de robotique derrière Ameca, vient de présenter les derniers résultats de développement de l'équipe. Dans la vidéo, le robot Ameca a des capacités visuelles et peut voir et décrire toute la pièce et des objets spécifiques. Le plus étonnant, c'est qu'elle peut aussi
 Le premier robot capable d'accomplir de manière autonome des tâches humaines apparaît, avec cinq doigts flexibles et rapides, et de grands modèles prennent en charge l'entraînement dans l'espace virtuel
Mar 11, 2024 pm 12:10 PM
Le premier robot capable d'accomplir de manière autonome des tâches humaines apparaît, avec cinq doigts flexibles et rapides, et de grands modèles prennent en charge l'entraînement dans l'espace virtuel
Mar 11, 2024 pm 12:10 PM
Cette semaine, FigureAI, une entreprise de robotique investie par OpenAI, Microsoft, Bezos et Nvidia, a annoncé avoir reçu près de 700 millions de dollars de financement et prévoit de développer un robot humanoïde capable de marcher de manière autonome au cours de la prochaine année. Et l’Optimus Prime de Tesla a reçu à plusieurs reprises de bonnes nouvelles. Personne ne doute que cette année sera celle de l’explosion des robots humanoïdes. SanctuaryAI, une entreprise canadienne de robotique, a récemment lancé un nouveau robot humanoïde, Phoenix. Les responsables affirment qu’il peut accomplir de nombreuses tâches de manière autonome, à la même vitesse que les humains. Pheonix, le premier robot au monde capable d'accomplir des tâches de manière autonome à la vitesse d'un humain, peut saisir, déplacer et placer avec élégance chaque objet sur ses côtés gauche et droit. Il peut identifier des objets de manière autonome
 Comment l'IA peut-elle rendre les robots plus autonomes et adaptables ?
Jun 03, 2024 pm 07:18 PM
Comment l'IA peut-elle rendre les robots plus autonomes et adaptables ?
Jun 03, 2024 pm 07:18 PM
Dans le domaine de la technologie de l’automatisation industrielle, il existe deux points chauds récents qu’il est difficile d’ignorer : l’intelligence artificielle (IA) et Nvidia. Ne changez pas le sens du contenu original, affinez le contenu, réécrivez le contenu, ne continuez pas : « Non seulement cela, les deux sont étroitement liés, car Nvidia ne se limite pas à son unité de traitement graphique d'origine (GPU ), il étend son GPU. La technologie s'étend au domaine des jumeaux numériques et est étroitement liée aux technologies émergentes d'IA "Récemment, NVIDIA a conclu une coopération avec de nombreuses entreprises industrielles, notamment des sociétés d'automatisation industrielle de premier plan telles qu'Aveva, Rockwell Automation, Siemens. et Schneider Electric, ainsi que Teradyne Robotics et ses sociétés MiR et Universal Robots. Récemment, Nvidiahascoll
 Après 2 mois, le robot humanoïde Walker S peut plier les vêtements
Apr 03, 2024 am 08:01 AM
Après 2 mois, le robot humanoïde Walker S peut plier les vêtements
Apr 03, 2024 am 08:01 AM
Rédacteur en chef du Machine Power Report : Wu Xin La version domestique de l'équipe robot humanoïde + grand modèle a accompli pour la première fois la tâche d'exploitation de matériaux flexibles complexes tels que le pliage de vêtements. Avec le dévoilement de Figure01, qui intègre le grand modèle multimodal d'OpenAI, les progrès connexes des pairs nationaux ont attiré l'attention. Hier encore, UBTECH, le « stock numéro un de robots humanoïdes » en Chine, a publié la première démo du robot humanoïde WalkerS, profondément intégré au grand modèle de Baidu Wenxin, présentant de nouvelles fonctionnalités intéressantes. Maintenant, WalkerS, bénéficiant des capacités de grands modèles de Baidu Wenxin, ressemble à ceci. Comme la figure 01, WalkerS ne se déplace pas, mais se tient derrière un bureau pour accomplir une série de tâches. Il peut suivre les commandes humaines et plier les vêtements
 Mar 22, 2024 pm 08:51 PM
Mar 22, 2024 pm 08:51 PM
Les 10 robots humanoïdes suivants façonnent notre avenir : 1. ASIMO : Développé par Honda, ASIMO est l'un des robots humanoïdes les plus connus. Mesurant 4 pieds de haut et pesant 119 livres, ASIMO est équipé de capteurs avancés et de capacités d'intelligence artificielle qui lui permettent de naviguer dans des environnements complexes et d'interagir avec les humains. La polyvalence d'ASIMO le rend adapté à une variété de tâches, allant de l'assistance aux personnes handicapées à la réalisation de présentations lors d'événements. 2. Pepper : Créé par Softbank Robotics, Pepper vise à être un compagnon social pour les humains. Avec son visage expressif et sa capacité à reconnaître les émotions, Pepper peut participer à des conversations, aider dans les commerces de détail et même fournir un soutien pédagogique. Poivrons
 Le robot de balayage et de nettoyage Cloud Whale Xiaoyao 001 a un « cerveau » ! Expérience |
Apr 26, 2024 pm 04:22 PM
Le robot de balayage et de nettoyage Cloud Whale Xiaoyao 001 a un « cerveau » ! Expérience |
Apr 26, 2024 pm 04:22 PM
Les robots de balayage et de nettoyage sont l’un des appareils électroménagers intelligents les plus populaires auprès des consommateurs ces dernières années. La commodité d'utilisation qu'il apporte, voire l'absence d'opération, permet aux paresseux de libérer leurs mains, permettant aux consommateurs de « se libérer » des tâches ménagères quotidiennes et de consacrer plus de temps à ce qu'ils aiment. Une qualité de vie améliorée sous une forme déguisée. Surfant sur cet engouement, presque toutes les marques d'électroménager du marché fabriquent leurs propres robots de balayage et de nettoyage, rendant l'ensemble du marché des robots de balayage et de nettoyage très vivant. Cependant, l'expansion rapide du marché entraînera inévitablement un danger caché : de nombreux fabricants utiliseront la tactique de la mer de machines pour occuper rapidement plus de parts de marché, ce qui entraînera de nombreux nouveaux produits sans aucun point de mise à niveau. ce sont des modèles de "matriochka". Ce n'est pas une exagération. Cependant, tous les robots de balayage et de nettoyage ne sont pas
 Le robot humanoïde peut faire de la magie, laissez l'équipe du programme du Gala de la Fête du Printemps en savoir plus
Feb 04, 2024 am 09:03 AM
Le robot humanoïde peut faire de la magie, laissez l'équipe du programme du Gala de la Fête du Printemps en savoir plus
Feb 04, 2024 am 09:03 AM
En un clin d’œil, les robots ont appris à faire de la magie ? On a vu qu'il avait d'abord ramassé la cuillère à eau sur la table, prouvant au public qu'il n'y avait rien dedans... Ensuite, il a mis l'objet en forme d'œuf dans sa main, puis a remis la cuillère à eau sur la table. et a commencé à « jeter un sort »... … Juste au moment où il a repris la cuillère à eau, un miracle s'est produit. L'œuf qui avait été initialement mis dedans a disparu et la chose qui a sauté s'est transformée en ballon de basket... Regardons à nouveau les actions continues : △ Cette animation montre un ensemble d'actions à une vitesse 2x, et cela se déroule sans problème uniquement en regardant. la vidéo à plusieurs reprises à une vitesse de 0,5x peut-elle être comprise. Finalement, j'ai découvert les indices : si la vitesse de ma main était plus rapide, je pourrais peut-être la cacher à l'ennemi. Certains internautes ont déploré que les compétences magiques du robot soient encore supérieures aux leurs : c'est Mag qui a réalisé cette magie pour nous.
 Une université américaine ouvre un concours d'ingénierie 'The Legend of Zelda: Tears of the Kingdom' pour permettre aux étudiants de construire des robots
Nov 23, 2023 pm 08:45 PM
Une université américaine ouvre un concours d'ingénierie 'The Legend of Zelda: Tears of the Kingdom' pour permettre aux étudiants de construire des robots
Nov 23, 2023 pm 08:45 PM
"The Legend of Zelda: Tears of the Kingdom" est devenu le jeu Nintendo le plus vendu de l'histoire. Non seulement Zonav Technology a apporté divers contenus communautaires "Zelda Creator", mais il est également devenu un nouveau cours d'ingénierie à l'université des États-Unis. du Maryland (UMD). Rewrite : The Legend of Zelda : Tears of the Kingdom est l'un des jeux Nintendo les plus vendus jamais enregistrés. Non seulement la technologie Zonav apporte un contenu communautaire riche, mais elle fait également partie du nouveau cours d'ingénierie de l'Université du Maryland. Cet automne, le professeur agrégé Ryan D. Sochol de l'Université du Maryland a ouvert un cours intitulé ".
