

Considérez le scénario de « foules de personnes faisant la queue pour entrer dans l’ascenseur ». Si la personne qui entre en premier est « égoïste », alors elle s'arrêtera sur place après être entrée dans l'ascenseur, ce qui empêchera les personnes derrière lui d'entrer dans l'ascenseur. Si la personne devant est « altruiste », alors elle prendra l'initiative d'entrer, afin que les personnes derrière puissent entrer dans l'ascenseur en douceur.
Inspirés par ce scénario, les chercheurs ont développé la stratégie d'exploration désintéressée. Cette stratégie simple peut améliorer considérablement l'efficacité de la coopération du système de cluster de robots. Les résultats ont été publiés dans Nature Communications en juin 2023.

▍Présentation de l'exploration « désintéressée » : rendre la coopération robotique plus efficace
Parmi les nombreux systèmes d’essaims robotisés, le contrôle de la formation d’essaims est un problème important et unique. Comparé à d’autres problèmes de collaboration en cluster, le contrôle de la formation présente un défi technique unique, c’est-à-dire que la formation globale est en réalité une contrainte globale. Cette contrainte crée une relation de compétition entre des robots qui à l'origine coopèrent. Essentiellement, c’est cette relation de compétition qui apporte de nombreuses difficultés au contrôle des formations.
Les méthodes traditionnelles utilisent généralement l'attribution d'objectifs pour résoudre le problème de compétition entre robots. Cependant, les méthodes basées sur l'allocation présentent des problèmes de tolérance aux pannes et de faible adaptabilité. Lorsque les objectifs assignés sont déraisonnables ou que certains robots fonctionnent mal, les objectifs doivent être constamment réaffectés, ce qui entraînera une faible efficacité.
Récemment, des chercheurs de l'Université de Westlake, de l'Université de Beihang, de l'Université de Tsinghua et de l'Université de Sheffield au Royaume-Uni ont proposé une nouvelle méthode de contrôle de la coordination des robots basée sur une stratégie d'exploration « désintéressée » Le noyau repose sur un algorithme basé sur le décalage moyen. Pour résoudre les conflits de concurrence entre robots : C'est-à-dire que lorsqu'un robot prédit qu'il entrera en compétition avec les robots environnants, il abandonnera activement sa position actuelle et se déplacera vers une zone plus ouverte. C'est ce qu'on appelle une stratégie « altruiste » car elle peut résoudre « activement » les conflits.
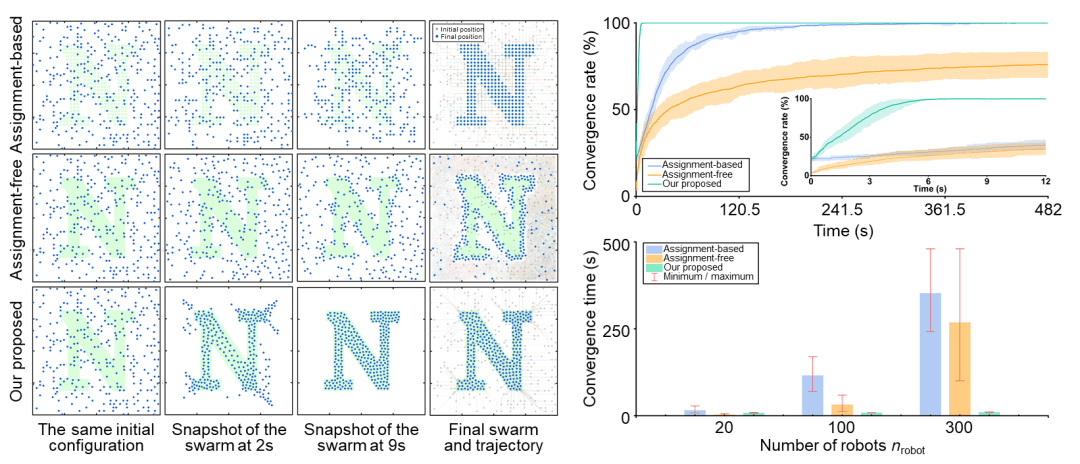
Par rapport aux derniers travaux de recherche, l'efficacité de la stratégie d'exploration « altruiste » proposée peut être améliorée des dizaines de fois lorsque la taille du cluster est grande, et cette amélioration sera encore renforcée à mesure que la taille du cluster augmente. De plus, comme elle ne repose pas sur l’allocation de cibles, cette stratégie est intrinsèquement tolérante aux pannes et adaptable, et peut être étendue à l’exploration spatiale complexe, à la gestion collaborative et à d’autres tâches.
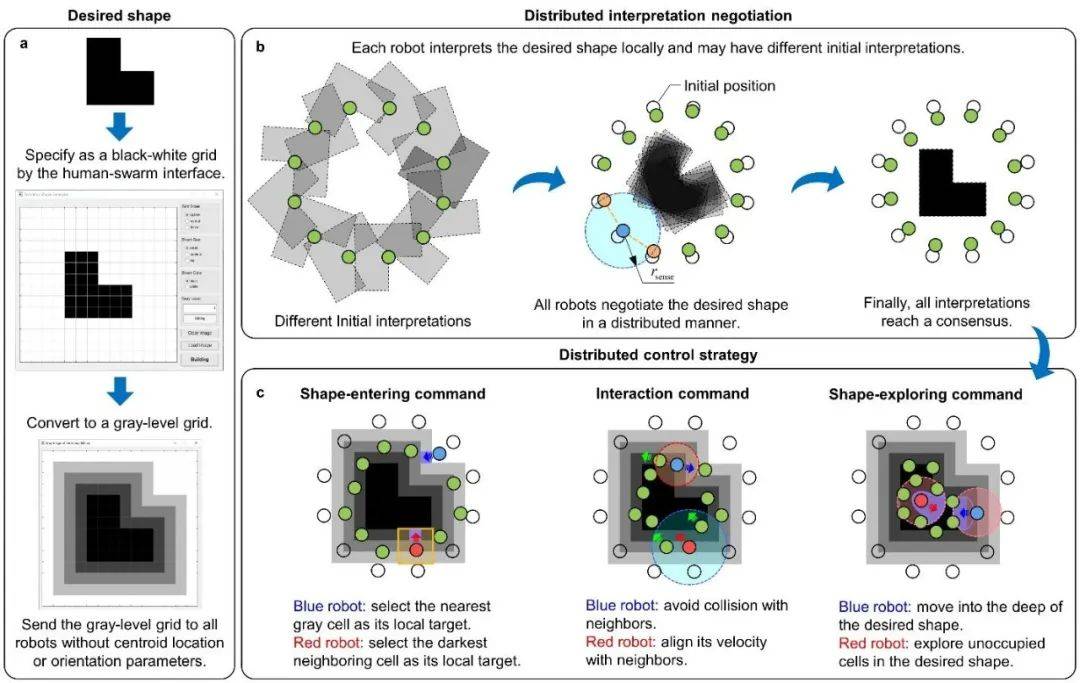
La stratégie d'exploration « désintéressée » se compose de trois parties. La première partie est le système d'interaction humain-cluster, qui est utilisé pour formuler la formation géométrique requise par les personnes. La deuxième partie est un algorithme de négociation distribuée. Tous les robots négocient les paramètres euclidiens de la formation cible, y compris la position et la direction, avec leurs voisins environnants de manière distribuée. La troisième et la plus importante partie est l’algorithme de contrôle de formation distribué. L'algorithme de contrôle se compose de trois instructions de contrôle. La première est la commande d'entrée en formation, qui consiste à introduire le robot dans la formation cible. La seconde est la commande d'exploration de formation, qui est utilisée pour explorer la zone réalisable au sein de la formation via le mécanisme Mean-Shift. Le troisième est la commande interactive, utilisée pour éviter les collisions et aligner la vitesse entre les robots.
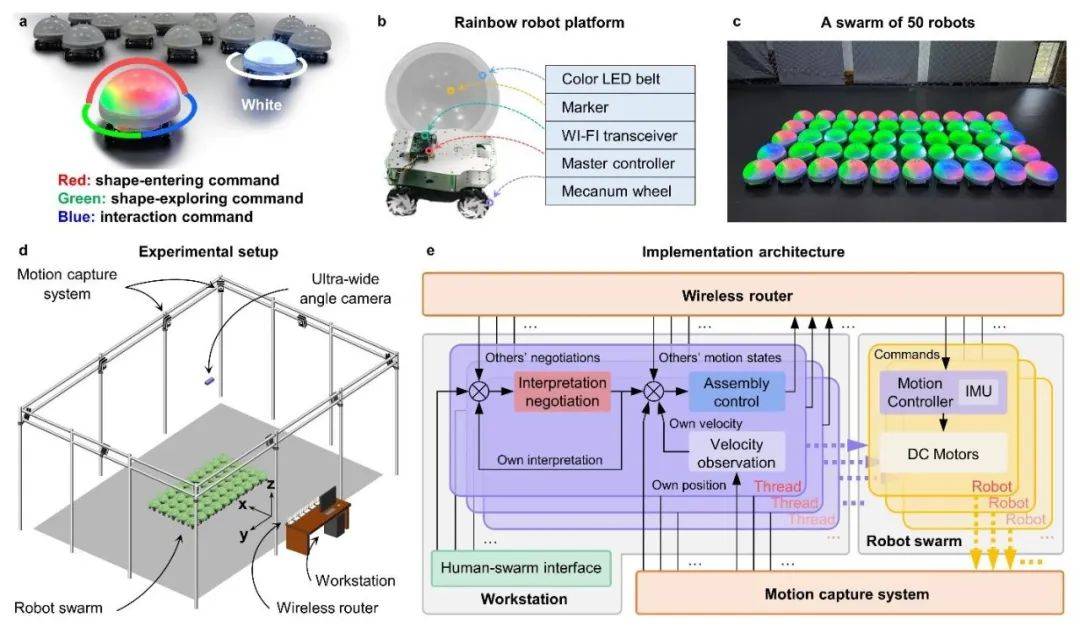
contenant 50 robots au sol. Des expériences pertinentes ont été menées avec le support d'un système de capture de mouvement en intérieur et mises en œuvre de manière parallèle et distribuée multithread.
▍Les clusters de robots effectuent diverses tâches : ils possèdent une collaboration efficace et des capacités de contrôle autonomes
La stratégie d'exploration « altruiste » peutcontrôler l'auto-organisation du robot pour former des formes complexes non convexes. Par exemple, une formation en « flocon de neige » avec de riches branches. Grâce à cette stratégie, le cluster de robots peut réaliser avec précision la formation sans tomber dans un optimal local. De plus, les essaims de robots peuvent ainsi former différentes formations non convexes et passer en douceur d’une forme à une autre.
L'efficacité de la stratégie d'exploration « altruiste » est des dizaines de fois supérieure à celle des derniers travaux de recherche, et cette amélioration sera encore renforcée à mesure que la taille du cluster augmente.
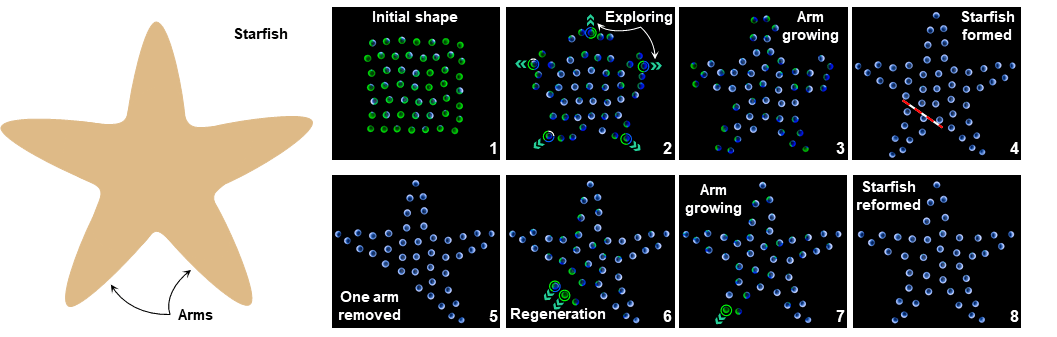
Parce qu'elle n'est pas limitée par des problèmes tels que l'attribution des cibles et les changements dans le nombre de robots, la stratégie d'exploration « altruiste » possède des capacités adaptatives. Par exemple, lorsque certains robots sont retirés du cluster, l'ensemble du système ne nécessite aucune détection de pannes ni aucun contrôle tolérant aux pannes et peut se reformer de manière transparente en formation, ce qui confère à l'ensemble du système un certain degré de capacité de « régénération ».
Une autre caractéristique de la stratégie d'exploration « altruiste » est la capacité de suivre des formations variant dans le temps. Une application importante consiste à réaliser une manipulation collaborative de plusieurs robots. Dans ce processus, d'une part, le robot doit maintenir la formation et, d'autre part, il doit suivre le leader pour réaliser le mouvement de la formation, réalisant ainsi un transport coordonné des marchandises.
De plus, la stratégie d'exploration « altruiste » peut être utilisée pour explorer des environnements complexes. Par exemple, vous pouvez simuler une foule de personnes entrant dans une pièce par une entrée étroite sans rester coincé à l’entrée. Il convient de souligner que Cet exemple explique de manière vivante la stratégie d'exploration « désintéressée ». C'est très similaire à la scène de vie des personnes entrant dans l'ascenseur : si beaucoup de gens veulent entrer dans l'ascenseur, Si une personne est "égoïste", alors elle cessera de bouger après être entrée dans l'ascenseur car elle a atteint son objectif . Cependant, cela bloquera l’entrée à ceux qui se trouvent derrière vous. Si cette personne est "altruiste", alors elle prendra l'initiative d'entrer à l'intérieur, afin que les personnes derrière puissent entrer en douceur.
Un autre exemple est qu'il peut être utilisé pour explorer des labyrinthes complexes. Bien qu'il existe de nombreuses structures non convexes telles que des coins dans le labyrinthe, cette stratégie permet toujours d'obtenir une couverture complète du labyrinthe sans tomber dans l'optimum local en raison de sa bonne explorabilité.
▍Conclusion
L'idée de l'algorithme proposé dans cet article est très simple, mais c'est une idée si simplequi résout un problème important auquel on est confronté depuis longtemps dans le contrôle de la formation de clusters. À l'avenir, les capacités de perception de la plate-forme robotique pourront être encore étendues pour rendre l'ensemble du système plus intelligent et permettre l'émergence de comportements en essaim véritablement similaires à ceux d'organismes hautement intelligents.
▍Source de l'article
G. Sun, R. Zhou, Z. Ma, Y. Li, R. Groß, Z. Chen et S. Zhao*, "Exploration du décalage moyen dans l'assemblage de forme d'essaims de robots", Nature Communications, vol. , pp. 3476, 2023. https://doi.org/10.1038/s41467-023-39251-5
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
















![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



