
 Périphériques technologiques
IA
Explication détaillée de l'évitement d'obstacles, de la planification de trajectoire et de la technologie de contrôle pour les véhicules autonomes
Périphériques technologiques
IA
Explication détaillée de l'évitement d'obstacles, de la planification de trajectoire et de la technologie de contrôle pour les véhicules autonomes
Explication détaillée de l'évitement d'obstacles, de la planification de trajectoire et de la technologie de contrôle pour les véhicules autonomes

1 Introduction
Les systèmes de transport intelligents résolvent des problèmes difficiles d'autonomie et de sécurité dans des environnements complexes, ils attirent donc particulièrement l'attention des chercheurs. Les principaux modules du concept de véhicule autonome sont la perception, la planification et le contrôle.
En fait, la perception consiste en une modélisation et une localisation de l'environnement. Ils s’appuient respectivement sur des capteurs externes et corporels. Ensuite, la planification vise à générer une trajectoire optimale basée sur les informations véhiculées par les résultats de détection afin d'atteindre une destination donnée. Enfin, le module de contrôle est dédié au suivi de la trajectoire générée en commandant les actionneurs du véhicule.
Cet article présentera chaque module du processus pour la situation spécifique d'évitement des obstacles. L'intégration de ces tâches dans une architecture globale est la principale contribution de cet article. Le module de perception garantit que l'environnement est décrit sur la base d'une représentation en grille précise. L'utilisation de cartes de grille d'occupation (OGM) est particulièrement pratique pour éviter les obstacles, car elles peuvent identifier les espaces carrossables et localiser les objets statiques et dynamiques dans la scène. La pose de l'objet à éviter est ensuite utilisée au niveau de la planification du chemin, qui génère des trajectoires et des profils de vitesse basés sur la fonction paramétrée sigmoïde et l'horizon roulant présentés dans [1]. Le profil de courbure obtenu est considéré comme le chemin de référence pour guider le module de contrôle. Ce niveau fournit au véhicule l'angle de braquage approprié basé sur un contrôleur de guidage latéral qui utilise le centre d'impact (CoP) au lieu du centre de gravité classique. Le contrôleur proposé est basé sur des actions de rétroaction anticipée et de retour d'état robuste pour réduire l'impact des perturbations sur les erreurs latérales et assurer la stabilité latérale, respectivement [2].
Le document est organisé comme suit : La partie II présente l'approche globale, qui contient les différents modules qui seront mis en œuvre pour éviter les obstacles. La troisième partie présente la méthode de détection dynamique d'objets basée sur l'occupation d'une grille de confiance. La section 4 explique l'algorithme d'évitement d'obstacles basé sur la fonction sigmoïde paramétrée et l'horizon roulant. La section 5 détaille la conception du contrôleur basée sur un couplage direct avec une rétroaction d'état robuste. La section 6 décrit la plateforme expérimentale et les résultats de cette méthode expérimentale. Enfin, la section 7 conclut l'article.
2 Stratégie d'évitement d'obstacles
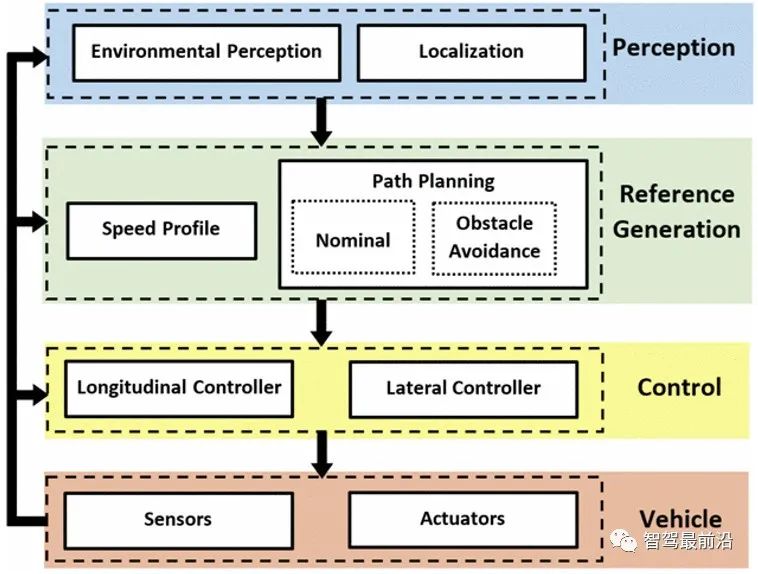
Cette section présente le titre de la stratégie globale d'évitement d'obstacles basée sur trois modules, comme le montre la figure 1. Cette section présente brièvement chaque niveau.
 Photos
Photos
Figure 1 Stratégie d'évitement d'obstacles
A Module de perception
Percevoir correctement et efficacement l'environnement est obligatoire pour les véhicules autonomes. Cette recherche se concentre principalement sur la perception de l'environnement pour extraire les emplacements d'objets statiques/dynamiques et les chemins praticables sur la base de capteurs de détection externes. La position du véhicule non prise en compte dans la partie positionnement est considérée comme connue et fiable. L'une des méthodes les plus courantes pour extraire des informations sur les routes et les objets environnants est la « Grille d'occupation » (OG). Il peut être utilisé dans diverses applications telles que l'évitement de collision, la fusion de capteurs, le suivi de cibles et la localisation et la cartographie simultanées (SLAM) [3]. L'idée de base de OG est de représenter le graphe de l'environnement sous forme de champs de variables aléatoires binaires uniformément espacés, chaque variable représentant s'il y a un obstacle à cet endroit dans l'environnement [4]. Il peut être généré sous de nombreuses formes pour gérer les mesures de capteurs bruyantes et incertaines étant donné une attitude connue du véhicule. Dans cet article, OG est défini par la théorie des croyances proposée par Dempster et Shafer [5][6] car elle modélise l'incertitude, l'imprécision et les parties inconnues et permet également de gérer les conflits dans la fusion de données. La partie 3 donne plus de détails.
B. Module de génération de trajectoire de référence
Ce module est dédié à la définition de la trajectoire et de la courbe de vitesse correspondante à suivre par le véhicule. Le planificateur reçoit la zone carrossable et les emplacements des obstacles du module de perception. Sur la base de ces informations, des trajectoires géométriques et des courbes de vitesse peuvent être générées. Cet article se concentre sur les stratégies de planification de chemin. Cette section vise à fournir une trajectoire nominale d'un point de départ à un point final en fonction de la zone de conduite perçue.
Lorsqu'un obstacle est détecté, la deuxième trajectoire (trajectoire d'évitement d'obstacle) est calculée pour assurer la sécurité et le confort des passagers du véhicule autonome, et ajoutée à la trajectoire nominale après évitement. Cette trajectoire d'évitement peut être obtenue par planification locale puisqu'elle ne concerne qu'une petite partie de la trajectoire nominale. Pour réduire le coût de calcul de l'algorithme de génération de trajectoire, la méthode de l'horizon roulant est adoptée, comme décrit dans [1], dont le travail est étendu dans cet article, voir la section IV. Ces trajectoires (nominales et évitement d'obstacles) peuvent alors être considérées comme des références pour les modules de contrôle (principalement les contrôleurs latéraux).
C.Module de contrôle
Le module de commande se compose de deux parties principales : des contrôleurs longitudinaux et latéraux, assurant le contrôle automatique de la conduite. L’accent principal ici est mis sur les contrôleurs latéraux pour gérer l’évitement des obstacles. En effet, l'angle de braquage approprié est fourni par le contrôleur latéral pour suivre la trajectoire souhaitée donnée par le module de génération de référence. Le suivi de la trajectoire souhaitée peut être obtenu en réduisant deux erreurs de suivi, à savoir l'erreur latérale et l'erreur de cap. Parmi les stratégies de guidage latéral géométrique et dynamique présentes dans la littérature [7], une approche dynamique basée sur le Centre de Collision (CoP) est adoptée ici [8]. Le choix dépend des performances de cette méthode de contrôle. Le CoP est un point géométrique situé devant le centre de gravité (CoG) du véhicule qui prédit les erreurs de position latérale. On peut alors s’attendre à un meilleur suivi de trajectoire. D'un autre côté, puisque le mouvement du CoP est découplé de la force latérale du pneu arrière [9], comme le montre la section V, l'équation de la dynamique latérale devient moins complexe.
2 Détection dynamique d'obstacles basée sur une grille dynamique
OG est une représentation qui subdivise l'espace de manière multidimensionnelle en unités, et chaque unité stocke la connaissance de son statut d'occupation [4]. Aujourd’hui, OG est largement utilisé car des ressources plus puissantes sont disponibles pour gérer sa complexité informatique. La construction de maillages a été appliquée en dimensions multiples (2D, 2.5D et 3D) [10], où chaque état de cellule est décrit selon une forme sélectionnée. Le plus courant est le cadre bayésien, qui a été adopté pour la première fois par Elfes [4] et a ensuite subi de nombreuses extensions pour devenir le célèbre filtre d'occupation bayésien (BOF) [11]. D'autres travaux proposent un formalisme basé sur la théorie de Dempster-Shafer, également connue sous le nom de théorie de l'évidence, qui est décrite ultérieurement.
A. Utilisation de la théorie des croyances
Réduite à la théorie des probabilités, la théorie des croyances fournit une représentation adéquate des défauts des données et des sources et est donc adaptée à la perception en ITS. Il fournit une large gamme d'opérateurs de fusion capables de gérer ces propriétés en fonction de l'application. Certaines recherches sur la construction d'OG à l'aide du cadre Belief peuvent être trouvées dans [12], [13]. Ce travail est issu des recherches de [13], qui ont proposé une méthode de détection d'objets en mouvement et de détermination de l'espace pilotable basée sur les conflits résultants. A cet effet, une trame d'identification est définie pour inclure l'état d'une cellule considérée comme libre (F) ou occupée (O). La boîte de reconnaissance est Ω={F, O}. Le cadre d'ensemble de puissance de référence contient toutes les combinaisons possibles des hypothèses suivantes : 2Ω= {∅,F,O,{F,O}}. Afin d'exprimer la croyance en chaque état, la fonction de masse m(.) représente le conflit m(∅), l'état libre m(F), l'état occupé m(O) et l'état inconnu m({F,O }) respectivement.
B. Modèle de capteur
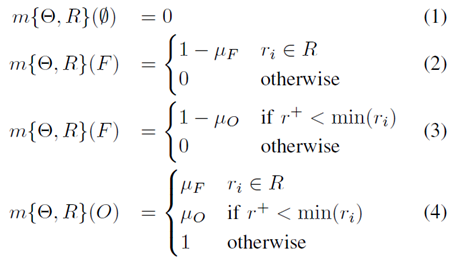
Fondamentalement, le modèle de capteur permet de calculer la fonction de qualité de l'état correspondant à la métrique. Dans notre application, le capteur à utiliser est un LIDAR 3D multi-écho (voir Section VI). Les données d'entrée comprendront une plage ri basée sur un point pi et un angle θi. A partir de cet ensemble de données, une grille de balayage (SG) en coordonnées polaires est construite. Chaque ligne de SG correspond à un secteur angulaire Θ=[θ-, θ+] défini dans RxΘ. La plage de la cellule est R=[r-,r+] ce qui signifie que chaque cellule est définie par une paire de masses m{Θ,R}. La masse A∈Ω correspondant à chaque proposition se trouve ici [13] :
 photo
photo
où μF et μO correspondent respectivement à la probabilité de fausse alarme et de détection manquée du capteur. Pour plus de simplicité, ces fonctions de masse, m(O), m(F) et m(Θ), seront illustrées.
 Photos
Photos
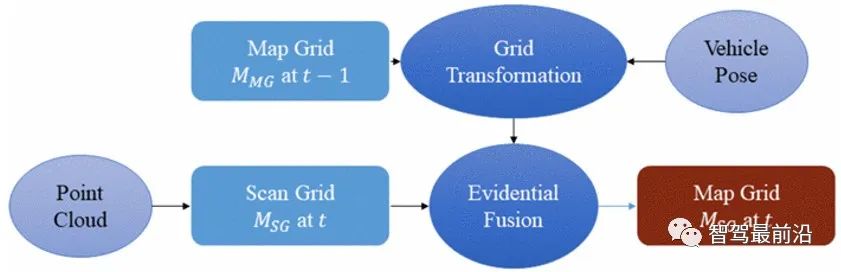
Figure 2 Construction de la grille de carte (MG)
La figure 2 montre le processus de construction et de mise à jour de la MG à l'aide du nuage de points de capteur fourni à l'instant t. Cette mise à jour est effectuée sur la base d'une fusion de preuves multi-grilles. C'est la partie la plus intéressante du processus, car elle laisse le temps de mettre à jour la grille de la carte et d'évaluer l'état de l'unité. Parmi les différents opérateurs de la théorie des croyances, la règle de combinaison de Dempster-Shafer est utilisée :

où mmG,t et mmG,t-1 représentent respectivement la qualité de la grille cartographique et de la grille numérisée au temps t. . L'opérateur est défini comme :

où
produit le résultat mMG,t(A) qui définit l'état de chaque cellule, qui dépend de l'état précédent et de la nouvelle métrique. La masse produite selon chaque état se trouve être la suivante [13] :
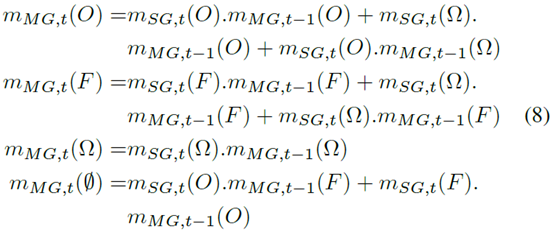
Fondamentalement, cette propriété montre la dissonance entre t-1 et t. Une incohérence se produit lorsqu'une unité passe de Libre à Occupée ou vice versa. Ainsi, la détection de conflits peut conduire à l’évaluation de cellules dynamiques. Les conflits permettent de marquer les cellules occupées qui changent d'état en fonction de deux types de conflits :

où

Le processus de fusion normalise la qualité de l'état par le conflit total, mais pensez à utiliser ces informations pour marquer le unité mobile qui définit l'objet dynamique. Chaque pose détectée est ensuite utilisée comme entrée pour la génération de trajectoire dans la section suivante.
4 Génération de trajectoire
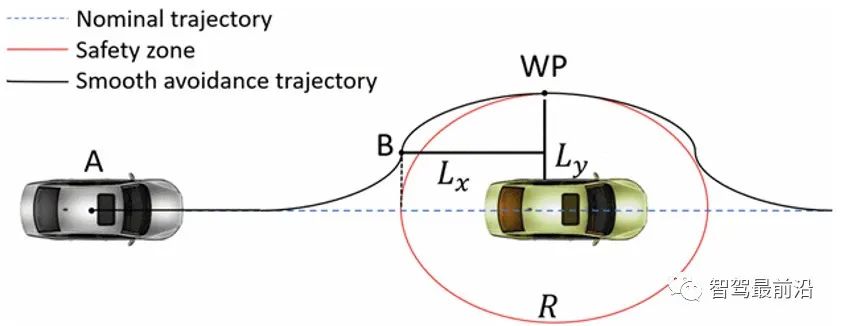
Cette section est dédiée à la planification de chemin, c'est-à-dire à la création d'une trajectoire géométrique (suivant des points de coordonnées) Ai(xi,yi). Puisque cet article vise à vérifier la faisabilité de l’architecture d’évitement proposée, la courbe de vitesse et le contrôle longitudinal associé ne sont pas pris en compte. Comme mentionné dans la section 2, le module de planification de chemin a deux objectifs : générer une trajectoire nominale globale basée sur les points d'origine et d'arrivée, et générer une trajectoire locale pour éviter de détecter des obstacles. Ici, l’accent est mis sur la génération de trajectoires d’évitement. Cette trajectoire d'évitement doit respecter les normes de sécurité, notamment les distances longitudinales et latérales aux obstacles. Ces distances peuvent être égales, créant une zone de sécurité circulaire autour de l'obstacle, comme récemment suggéré dans [1]. Cet article propose une généralisation de la méthode en considérant la situation globale où les normes de sécurité horizontales et verticales sont différentes.
Afin d'obtenir la forme géométrique de la trajectoire, il existe plusieurs méthodes mathématiques basées sur des fonctions telles que les courbes Clothoïdes, les courbes de Bézier ou les splines [14], [15]. Une revue exhaustive de toutes ces méthodes géométriques est donnée dans [16]. Ces méthodes présentent des caractéristiques intéressantes (fluidité, sélection de la meilleure trajectoire parmi un ensemble de candidats, etc.), mais elles peuvent être coûteuses en calcul. Parmi elles, la fonction sigmoïde représente un juste compromis entre fluidité et coût de calcul. L'approche considérée recommande d'utiliser cette méthode mathématique en conjonction avec un ordonnanceur Horizon natif pour réduire les coûts de calcul. Les avantages de cette approche de planification sont discutés en détail dans [1]. Ce planificateur local prend en compte les informations sur les obstacles détectés provenant de la grille d'occupation pour définir des manœuvres d'évitement en douceur appropriées et un retour à la trajectoire nominale.
A. Évitement géométrique
La figure 3 montre différentes trajectoires : trajectoire nominale, zone de sécurité et trajectoire finale d'évitement en douceur. La définition de la zone de sécurité R est la première étape après la détection d'un obstacle. Cette zone n'est pas navigable pour éviter les collisions dues à la proximité d'obstacles. Les axes semi-grands et semi-mineurs des ellipses Lx et Ly, respectivement, sont les critères de sécurité qui définissent la zone. Une fois définies, des trajectoires d’évitement peuvent être conçues. Pour assurer le confort des passagers, des caractéristiques basées sur la forme en S ont été choisies. Sur la figure 3, A fait référence au point de départ (c'est-à-dire le centre de gravité du véhicule du moi), B est le point de flambage du sigmoïde et WP est le point de départ à atteindre. La douceur C() peut être ajustée pour que la trajectoire évitée puisse être définie comme

Pour obtenir un algorithme robuste lorsque les obstacles se déplacent, l'ensemble du processus est répété pour chaque échantillon vectoriel horizontal (identifier la zone de sécurité et Calculer les waypoints en fonction de la fonction sigmoïde).
 Photos
Photos
Figure 3 Planification de trajectoire
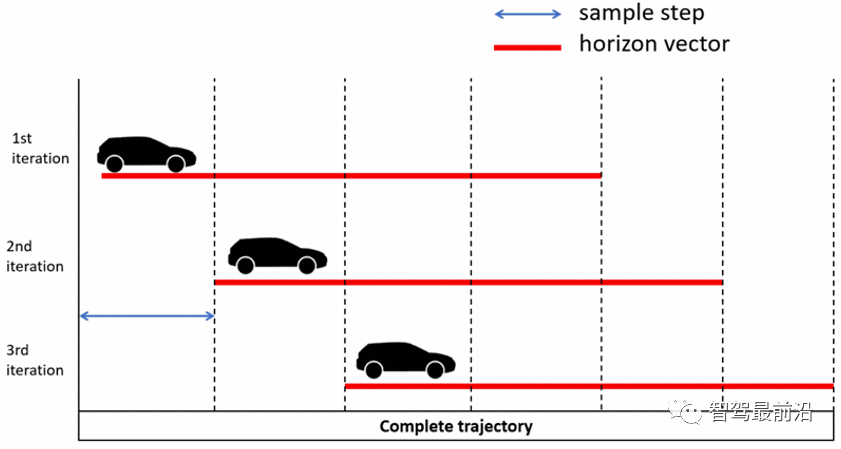
B. Planification horizontale
Afin de réduire le coût de calcul de l'algorithme, un planificateur local est utilisé. Il ne suit pas toute la trajectoire d’évitement d’obstacles, mais est divisé en plusieurs parties. Les trajectoires locales sont calculées pour chaque échantillon à ce niveau discret, réduisant ainsi le coût de calcul et rendant l'algorithme robuste aux obstacles dynamiques. Deux paramètres peuvent être paramétrés : la taille de l'échantillon et la longueur horizontale. Cette dernière dépend des capteurs de perception équipés (contraintes matérielles) et de la vitesse du véhicule (horizon roulant). Les exemples d'étapes représentent la subdivision de la trajectoire en segments locaux. L’ensemble du principe est résumé dans la figure 4.
 Photos
Photos
Image 4 Planification de l'Horizon
Lorsque le véhicule atteint l'étape d'échantillonnage suivante, l'horizon local sera à nouveau calculé. Comme on peut le constater, il existe une partie commune entre les deux itérations qui permet à l’algorithme de gérer les obstacles dynamiques. Comme pour le domaine temporel discret, le choix de la taille de l’échantillon nécessite un compromis entre précision et coût de calcul. L'algorithme itère jusqu'à ce que le vecteur horizon atteigne la fin de la trajectoire complète, c'est à dire lorsque les capteurs de perception couvrent toutes les subdivisions de la trajectoire. Cette trajectoire géométrique constitue l'entrée de l'étage de contrôle du guidage.
5 Conception du contrôleur
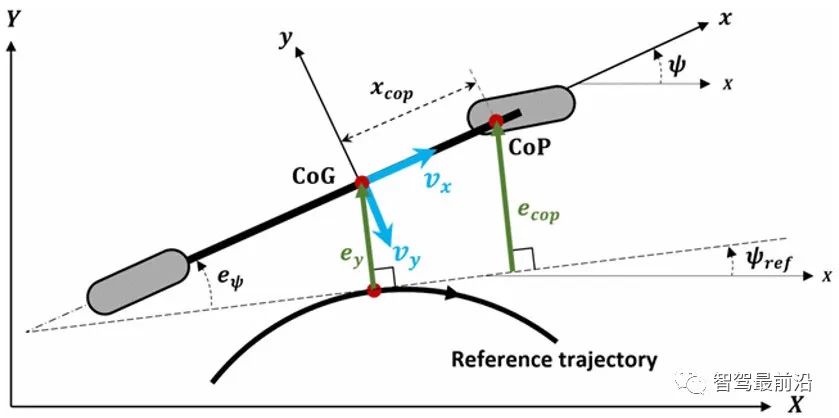
Cette section présente la conception du contrôleur latéral utilisée dans le module de commande illustré à la figure 1. Le guidage latéral vise à réduire deux types d'erreurs, à savoir l'erreur latérale, la distance entre le CoG du véhicule et la trajectoire de référence, et l'erreur de cap, la distance entre l'axe longitudinal du véhicule et la trajectoire de référence, comme le montre la figure 5 :
 Photo
Photo
Figure 5 Erreurs latérales et de cap
Ici, au lieu de l'erreur latérale CoG classique, il est recommandé d'utiliser l'erreur latérale lorsque le CoP est défini comme [9] :

entre CoP et CoG La distance xcop dépend uniquement de la configuration du véhicule :

où m et Iz sont la masse du véhicule et l'inertie de lacet, et lf est la distance entre le CoG et l'essieu avant. Il ressort de (12) que l’erreur latérale CoP ecop est supérieure à l’erreur latérale ey sur la figure 5. De cette façon, on peut s’attendre à des erreurs de position latérale et à un meilleur suivi de trajectoire. Contrairement aux contrôleurs classiques basés sur le CoG (Center of Gravity), le Centre d'Impact (CoP) est ici utilisé comme point géométrique sur le véhicule. Le principal avantage du CoP est la complexité réduite des équations de dynamique latérale, puisque les forces latérales du pneu arrière n'affectent pas le mouvement du CoP [9].
Basé sur le modèle planaire du vélo [17] et en utilisant les erreurs de suivi (11) et (12), le modèle d'erreur de suivi utilisé pour concevoir le contrôleur de navigation latérale CoP est :

où le vecteur d'état  , δf est l'angle de rotation de la roue avant,
, δf est l'angle de rotation de la roue avant,  car le terme de perturbation inclut la vitesse angulaire de lacet attendue et l'accélération angulaire de lacet.
car le terme de perturbation inclut la vitesse angulaire de lacet attendue et l'accélération angulaire de lacet.
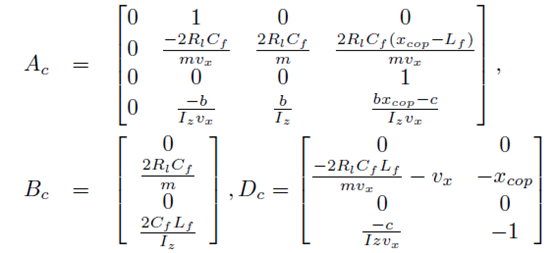 Photo
Photo



Lr est la distance entre le CoG et l'essieu arrière, Cf et Cr sont la rigidité en virage des pneus avant et arrière. Notez que Cr n'est pas dans la deuxième rangée de Ac. Par conséquent, l'utilisation de CoP peut réduire le nombre de paramètres incertains.
Le contrôleur latéral calcule le δf approprié afin de garantir que l'erreur du vecteur d'état converge vers zéro. De plus, puisque la dynamique du modèle d'erreur de poursuite est affectée par wref, le contrôleur doit également assurer un niveau d'atténuation de son influence. Afin d'atteindre ces objectifs, un contrôleur latéral couplé par feedforward à un retour d'état robuste est proposé [2] :
 picture
picture
LFF et KFB sont respectivement les gains de feedforward et de feedback robuste. Les actions de rétroaction visent à éliminer partiellement les effets du vecteur wref. L’avantage du CoP est que le feedback obtenu ne nécessite pas de connaissance de Cr. L'action de retour d'état assure une convergence exponentielle du vecteur d'erreur vers zéro et atténue l'influence du vecteur wref. Ce problème de contrôle robuste peut être exprimé en utilisant des inégalités matricielles linéaires (LMI) comme le montre [2].
6 Résultats expérimentaux
A. La plateforme expérimentale ARTEMIPS est un véhicule de test automatique équipé de multiples capteurs : IMU (Inertial Measurement Unit) RT-3002 de haute précision utilisant la technologie DGPS, 2 scanners laser IBEO LUX 2D 4 couches, 2 scanners lasers VLP-16 Velodyne3D et caméra haute portée MANTA-G125 (voir Figure 6)). Le RT-3002 est utilisé comme capteur de référence pour les mesures de position, de vitesse, d'accélération et de direction. Le scanner LUX permet une détection à distance (sous forme d'un nuage de points à 4 couches) à l'avant et à l'arrière de la voiture. VLP-16 est utilisé pour compléter la détection de l'environnement des deux côtés de la voiture (ils fournissent des nuages de points à 16 couches et ont une vue panoramique à 360°). ARTEMIPS est également équipé de 3 actionneurs et de 2 servomoteurs intégrés MAC-141 pour contrôler le volant et la pédale de frein, ainsi que d'un système NI-daq multifonctionnel pour la navigation dans le moteur de la voiture. Tous les capteurs et actionneurs sont liés à un ordinateur embarqué exécutant la solution logicielle RTMaps d'Intempora. Il s'agit d'une plateforme dédiée aux systèmes multi-capteurs et multi-actionneurs. Figure 6 Plateforme expérimentale ARTEMIPS et son référentiel B. Résultats expérimentaux Pour des raisons de lisibilité, un seul d'entre eux est obtenu en considérant la situation d'évitement d'obstacles. Un protocole expérimental est utilisé pour évaluer les performances de l'architecture proposée. Ce test est réalisé à une vitesse constante vx=10km/h. Des nuages de points ont été utilisés pour la construction d'OG selon la méthode décrite dans la partie III sur la base d'ensembles de données enregistrés à partir de quatre scanners laser. La figure 7 montre la scène environnante et les objets à éviter. La fusion temporelle de OG met en évidence le conflit dans la description des unités dynamiques. Un algorithme de clustering hiérarchique (issu de la boîte à outils Statistics and Machine Learning de MATLAB) a été appliqué pour construire des objets dynamiques. Ils sont illustrés à la figure 8. via un cadre de délimitation 3D. Les coordonnées affichées correspondent à l'attitude du véhicule basée sur les données GPS. Les objets à éviter sont les objets rouges. On peut noter qu’en raison de la sensibilité de la méthode aux erreurs de positionnement, certains résultats de détection erronés peuvent être trouvés. Figure 7 Séquence pour le test d'évitement d'obstacles Figure 9 Afficher . Comme vous pouvez le voir sur l'image supérieure gauche, la ligne de trajectoire nominale coupe la position de l'objet, tandis que le chemin rouge résultant évite les obstacles. On constate également que le contrôleur latéral assure un bon suivi de trajectoire et évite la détection d'obstacles entre 13 s et 20 s. Pendant cet intervalle de temps, le contrôleur génère un angle de braquage qui passe de valeurs positives à négatives pour éviter les obstacles et garantir une petite somme d'erreurs de suivi. Figure 9 Résultats du contrôleur de direction Cet article propose un schéma dynamique d'évitement d'obstacles basé sur trois niveaux de perception, de planification de chemin et de guidage de contrôle. La détection dynamique des obstacles est effectuée sur la base de la grille d'occupation des preuves. La planification de chemin est basée sur la fonction sigmoïde pour générer des trajectoires fluides afin d'éviter de détecter des obstacles. En fin de compte, le véhicule suit la trajectoire de référence générée par le véhicule grâce à une stratégie basée sur le contrôle latéral au centre de la collision. Les résultats expérimentaux sur notre véhicule d'essai montrent que cette méthode est efficace pour éviter les obstacles. Les travaux futurs comprendront la prise en compte des stratégies de positionnement et l'évaluation de l'approche dans des situations plus complexes. Références Photos Photos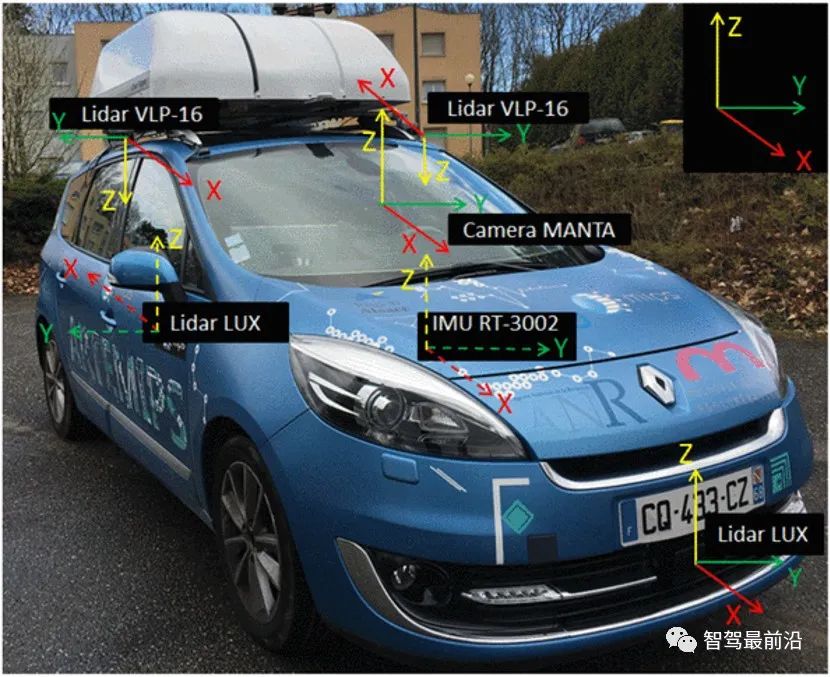 Photos
Photos  Photos
Photos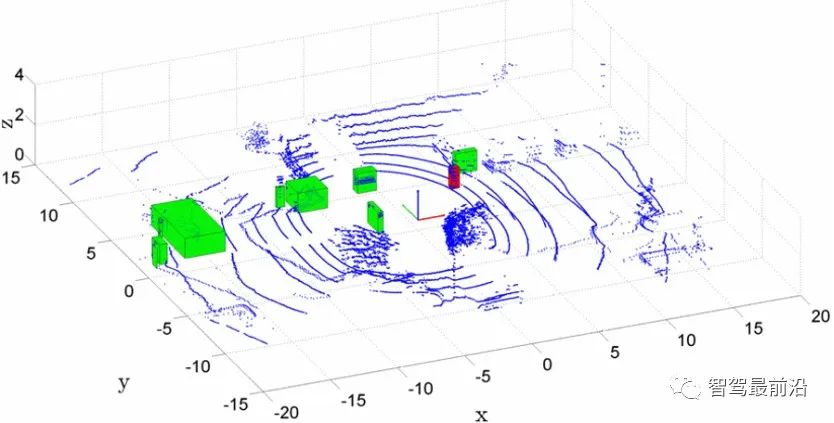 7 Conclusion
7 Conclusion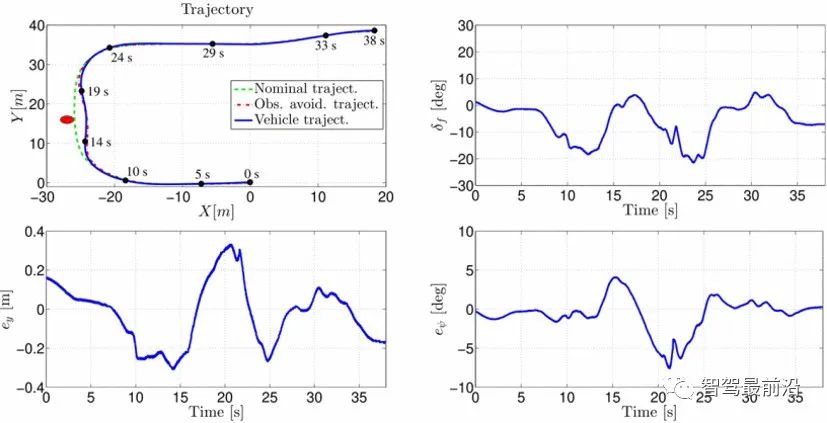
Photos
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Écrit ci-dessus et compréhension personnelle de l'auteur Le Gaussiansplatting tridimensionnel (3DGS) est une technologie transformatrice qui a émergé dans les domaines des champs de rayonnement explicites et de l'infographie ces dernières années. Cette méthode innovante se caractérise par l’utilisation de millions de gaussiennes 3D, ce qui est très différent de la méthode du champ de rayonnement neuronal (NeRF), qui utilise principalement un modèle implicite basé sur les coordonnées pour mapper les coordonnées spatiales aux valeurs des pixels. Avec sa représentation explicite de scènes et ses algorithmes de rendu différenciables, 3DGS garantit non seulement des capacités de rendu en temps réel, mais introduit également un niveau de contrôle et d'édition de scène sans précédent. Cela positionne 3DGS comme un révolutionnaire potentiel pour la reconstruction et la représentation 3D de nouvelle génération. À cette fin, nous fournissons pour la première fois un aperçu systématique des derniers développements et préoccupations dans le domaine du 3DGS.
 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
0. Écrit à l'avant&& Compréhension personnelle que les systèmes de conduite autonome s'appuient sur des technologies avancées de perception, de prise de décision et de contrôle, en utilisant divers capteurs (tels que caméras, lidar, radar, etc.) pour percevoir l'environnement et en utilisant des algorithmes et des modèles pour une analyse et une prise de décision en temps réel. Cela permet aux véhicules de reconnaître les panneaux de signalisation, de détecter et de suivre d'autres véhicules, de prédire le comportement des piétons, etc., permettant ainsi de fonctionner en toute sécurité et de s'adapter à des environnements de circulation complexes. Cette technologie attire actuellement une grande attention et est considérée comme un domaine de développement important pour l'avenir des transports. . un. Mais ce qui rend la conduite autonome difficile, c'est de trouver comment faire comprendre à la voiture ce qui se passe autour d'elle. Cela nécessite que l'algorithme de détection d'objets tridimensionnels du système de conduite autonome puisse percevoir et décrire avec précision les objets dans l'environnement, y compris leur emplacement,
 Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
L'article de StableDiffusion3 est enfin là ! Ce modèle est sorti il y a deux semaines et utilise la même architecture DiT (DiffusionTransformer) que Sora. Il a fait beaucoup de bruit dès sa sortie. Par rapport à la version précédente, la qualité des images générées par StableDiffusion3 a été considérablement améliorée. Il prend désormais en charge les invites multithèmes, et l'effet d'écriture de texte a également été amélioré et les caractères tronqués n'apparaissent plus. StabilityAI a souligné que StableDiffusion3 est une série de modèles avec des tailles de paramètres allant de 800M à 8B. Cette plage de paramètres signifie que le modèle peut être exécuté directement sur de nombreux appareils portables, réduisant ainsi considérablement l'utilisation de l'IA.
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un rôle important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contrôle de la planification en aval. La tâche de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer ! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus tôt possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R : Regardez d’abord l’enquête, p
 SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
Titre original : SIMPL : ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Lien article : https://arxiv.org/pdf/2402.02519.pdf Lien code : https://github.com/HKUST-Aerial-Robotics/SIMPL Affiliation de l'auteur : Université des sciences de Hong Kong et technologie Idée DJI Paper : cet article propose une base de référence de prédiction de mouvement (SIMPL) simple et efficace pour les véhicules autonomes. Par rapport au cent agent traditionnel
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
