
 Périphériques technologiques
IA
Relever les défis des tests d'automatisation des logiciels de robots mobiles
Périphériques technologiques
IA
Relever les défis des tests d'automatisation des logiciels de robots mobiles
Relever les défis des tests d'automatisation des logiciels de robots mobiles

Nous explorerons les complexités de l'automatisation des robots pour maisons mobiles et nous concentrerons sur les défis uniques liés à la mise en place pour surmonter diverses limitations afin de garantir aux utilisateurs un démarrage en douceur

Dans un article précédent, j'ai expliqué comment utiliser la technologie April Tag pour automatiser les robots domestiques. Un énorme défi lorsqu’il s’agit d’automatiser des robots domestiques ou d’autres robots est la configuration de l’appareil. Dans le monde des appareils, des téléphones et des applications mobiles, les appareils sont généralement connectés à l'appareil hôte via USB, et l'appareil est toujours connecté à une source d'alimentation. Cependant, pour tester des robots, un défi unique se pose : comment effectuer les tests pendant que le robot est en mouvement. Parce qu'il ne peut pas être connecté au périphérique hôte via une connexion filaire physique. Alors, comment devrions-nous vérifier l’expérience de déballage ? Ne vous inquiétez pas, je vais l'expliquer dans cet article
Complexités et défis
Après vous avoir donné une brève introduction aux différents défis de la phase de configuration dans les tests d'automatisation de bot, permettez-moi d'approfondir d'autres défis
bot Être en déplacement et ne pas avoir de connexion physique filaire avec l'appareil hôte. Cela peut être possible pour certains tests au niveau des composants, mais pas pour les tests de bout en bout (E2E).
L'expérience prête à l'emploi se produit lorsque l'appareil n'est pas connecté au WiFi. Comment l’appareil hôte interagit-il avec l’appareil lorsqu’il est neuf ? Il s'agit d'une situation très courante lors des tests quotidiens des robots
Lorsqu'une erreur ou une exception se produit dans le robot, des opérations de récupération sont nécessaires. L'objectif principal des tests automatisés est de découvrir les problèmes logiciels et matériels potentiels du robot. Si nous rencontrons un problème, comment devons-nous signaler et récupérer l'appareil ?
La batterie du robot est sur le point de s'épuiser et nous avons besoin d'une source d'alimentation fiable pour charger le robot
Il est très important d'étendre la même configuration à plusieurs environnements de laboratoire et domestiques. En effet, nous ne pouvons pas simplement signer ou tester le bot dans un seul environnement
Abordons ces problèmes par ordre chronologique. Il peut être réécrit comme suit : Résolvons ces problèmes dans l'ordre chronologique
Utilisation du robot par défaut du Raspberry Pi
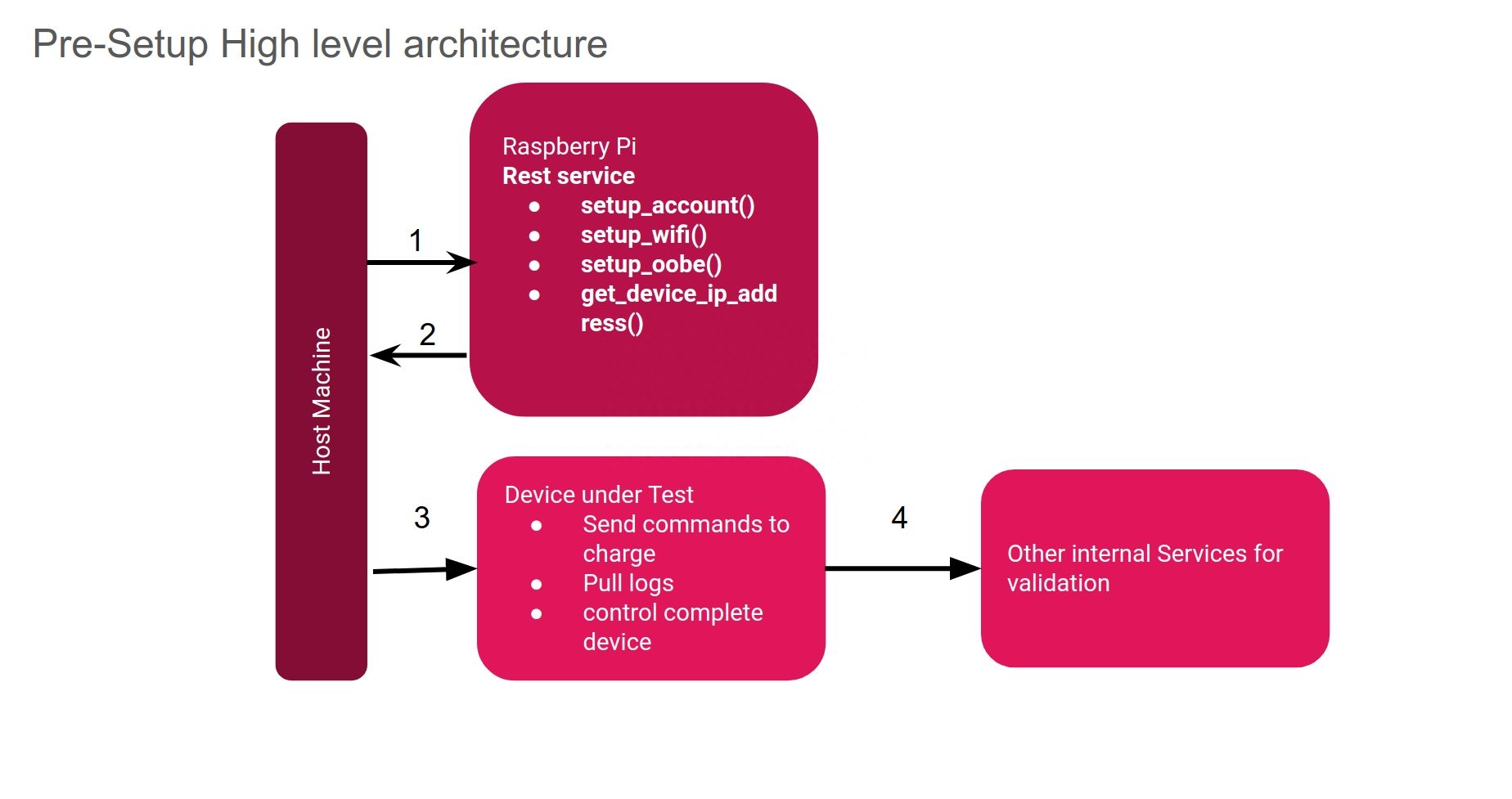
L'important est de résoudre ce problème. Prenons le cas d'un robot situé dans un laboratoire d'automatisation de tests. Il existe un périphérique hôte connecté au réseau interne de l'entreprise qui est utilisé pour envoyer et recevoir des commandes et accéder à divers codes sources, outils internes et infrastructures. Nous connecterons un Raspberry Pi à l'appareil et exécuterons un service REST sur le Raspberry Pi pour communiquer avec l'appareil hôte et l'appareil. Vous trouverez ci-dessous une illustration montrant la configuration
Robot prédéfini utilisant Raspberry Pi
Résolution du cas d'utilisation de l'expérience prête à l'emploi
Voyons maintenant comment préconfigurer l'environnement de test avec Raspberry Pi . Ensuite, nous explorerons comment résoudre le problème de l'appareil qui ne parvient pas à se connecter au Wifi lorsqu'il est prêt à l'emploi
Quel est le rôle des services RESTful sur le Raspberry Pi ? Quels points de terminaison un service RESTful doit-il contenir ?
- Flashez l'appareil
- Terminez OOBE
- Configurez le wifi, etc.
- Obtenez l'adresse IP du DUT
Il nous est maintenant très facile de connecter l'appareil via sans fil et l'appareil est prêt pour nos tests Soyez prêt
pour récupérer votre robot en cas d'erreur ou d'exception
C'est une situation très courante. Ne soyez pas submergé ou frustré par ce genre de questions. À ce stade, nous devons utiliser les composants de bas niveau de l’appareil pour ramener l’appareil à son emplacement d’origine. Par exemple, comme je l'ai mentionné dans mon article précédent avec diverses piles logicielles, nous avons besoin d'accéder à la plate-forme ou à la couche de mobilité pour ramener le robot à sa position d'origine. C'est la chose la plus délicate et la plus difficile à faire, alors utilisez une autre technologie comme April Tag ou d'autres systèmes externes pour faire reculer l'appareil. Cela m'amène à ma prochaine question, qui est de remettre l'appareil sur la station de chargement en vue du prochain test
Adaptation à plusieurs environnements de test
L'utilisation de commandes de bas niveau peut améliorer la fiabilité lors de la remise en place de l'appareil sur le station de chargement. Taux d'échec inférieur et efficacité supérieure à l'utilisation de commandes de mouvement ou de navigation de haut niveau et de pilotes de plate-forme ou de couche de mobilité
Conseils de configuration étendus pour plusieurs environnements de test :
- Gardez la configuration simple. Ne compliquez pas trop et ne sur-concevez pas la solution.
- Possède une image Raspberry Pi déployable afin que tout nouveau Raspberry Pi puisse être facilement chargé.
- Placez le code de test dans le référentiel distant. Les déplacer sur site ne sera pas évolutif.
L'automatisation robotique n'est pas une affaire simple et nécessite en fin de compte beaucoup de travail de conception et la prise en compte d'autres options disponibles sur le marché. Il n’existe pas de solution unique adaptée à toutes les situations. Avant d'adopter la solution finale, je recommande de réaliser une preuve de concept
Alternatives
Compte tenu de la nature et de la complexité des problèmes auxquels nous sommes confrontés, une question courante est de savoir s'il existe des alternatives. Bref, la réponse est oui. Nous pouvons tester efficacement en utilisant des émulateurs/émulateurs pour couvrir la plupart des cas d'utilisation que nous décrivons, mais rien ne remplace les tests d'appareils réels
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Que pensez-vous de furmark ? - Comment furmark est-il considéré comme qualifié ?
Mar 19, 2024 am 09:25 AM
Que pensez-vous de furmark ? - Comment furmark est-il considéré comme qualifié ?
Mar 19, 2024 am 09:25 AM
Que pensez-vous de furmark ? 1. Définissez le « Mode d'exécution » et le « Mode d'affichage » dans l'interface principale, ajustez également le « Mode de test » et cliquez sur le bouton « Démarrer ». 2. Après avoir attendu un moment, vous verrez les résultats du test, y compris divers paramètres de la carte graphique. Comment Furmark est-il qualifié ? 1. Utilisez une machine à pâtisserie Furmark et vérifiez les résultats pendant environ une demi-heure. Elle oscille essentiellement autour de 85 degrés, avec une valeur maximale de 87 degrés et une température ambiante de 19 degrés. Grand châssis, 5 ports de ventilateur de châssis, deux à l'avant, deux en haut et un à l'arrière, mais un seul ventilateur est installé. Tous les accessoires ne sont pas overclockés. 2. Dans des circonstances normales, la température normale de la carte graphique doit être comprise entre « 30 et 85 ℃ ». 3. Même en été, lorsque la température ambiante est trop élevée, la température normale est de « 50 à 85 ℃.
 L'Ameca deuxième génération est là ! Il peut communiquer couramment avec le public, ses expressions faciales sont plus réalistes et il peut parler des dizaines de langues.
Mar 04, 2024 am 09:10 AM
L'Ameca deuxième génération est là ! Il peut communiquer couramment avec le public, ses expressions faciales sont plus réalistes et il peut parler des dizaines de langues.
Mar 04, 2024 am 09:10 AM
Le robot humanoïde Ameca est passé à la deuxième génération ! Récemment, lors de la Conférence mondiale sur les communications mobiles MWC2024, le robot le plus avancé au monde, Ameca, est à nouveau apparu. Autour du site, Ameca a attiré un grand nombre de spectateurs. Avec la bénédiction de GPT-4, Ameca peut répondre à divers problèmes en temps réel. "Allons danser." Lorsqu'on lui a demandé si elle avait des émotions, Ameca a répondu avec une série d'expressions faciales très réalistes. Il y a quelques jours à peine, EngineeredArts, la société britannique de robotique derrière Ameca, vient de présenter les derniers résultats de développement de l'équipe. Dans la vidéo, le robot Ameca a des capacités visuelles et peut voir et décrire toute la pièce et des objets spécifiques. Le plus étonnant, c'est qu'elle peut aussi
 Le premier robot capable d'accomplir de manière autonome des tâches humaines apparaît, avec cinq doigts flexibles et rapides, et de grands modèles prennent en charge l'entraînement dans l'espace virtuel
Mar 11, 2024 pm 12:10 PM
Le premier robot capable d'accomplir de manière autonome des tâches humaines apparaît, avec cinq doigts flexibles et rapides, et de grands modèles prennent en charge l'entraînement dans l'espace virtuel
Mar 11, 2024 pm 12:10 PM
Cette semaine, FigureAI, une entreprise de robotique investie par OpenAI, Microsoft, Bezos et Nvidia, a annoncé avoir reçu près de 700 millions de dollars de financement et prévoit de développer un robot humanoïde capable de marcher de manière autonome au cours de la prochaine année. Et l’Optimus Prime de Tesla a reçu à plusieurs reprises de bonnes nouvelles. Personne ne doute que cette année sera celle de l’explosion des robots humanoïdes. SanctuaryAI, une entreprise canadienne de robotique, a récemment lancé un nouveau robot humanoïde, Phoenix. Les responsables affirment qu’il peut accomplir de nombreuses tâches de manière autonome, à la même vitesse que les humains. Pheonix, le premier robot au monde capable d'accomplir des tâches de manière autonome à la vitesse d'un humain, peut saisir, déplacer et placer avec élégance chaque objet sur ses côtés gauche et droit. Il peut identifier des objets de manière autonome
 Comment l'IA peut-elle rendre les robots plus autonomes et adaptables ?
Jun 03, 2024 pm 07:18 PM
Comment l'IA peut-elle rendre les robots plus autonomes et adaptables ?
Jun 03, 2024 pm 07:18 PM
Dans le domaine de la technologie de l’automatisation industrielle, il existe deux points chauds récents qu’il est difficile d’ignorer : l’intelligence artificielle (IA) et Nvidia. Ne changez pas le sens du contenu original, affinez le contenu, réécrivez le contenu, ne continuez pas : « Non seulement cela, les deux sont étroitement liés, car Nvidia ne se limite pas à son unité de traitement graphique d'origine (GPU ), il étend son GPU. La technologie s'étend au domaine des jumeaux numériques et est étroitement liée aux technologies émergentes d'IA "Récemment, NVIDIA a conclu une coopération avec de nombreuses entreprises industrielles, notamment des sociétés d'automatisation industrielle de premier plan telles qu'Aveva, Rockwell Automation, Siemens. et Schneider Electric, ainsi que Teradyne Robotics et ses sociétés MiR et Universal Robots. Récemment, Nvidiahascoll
 Après 2 mois, le robot humanoïde Walker S peut plier les vêtements
Apr 03, 2024 am 08:01 AM
Après 2 mois, le robot humanoïde Walker S peut plier les vêtements
Apr 03, 2024 am 08:01 AM
Rédacteur en chef du Machine Power Report : Wu Xin La version domestique de l'équipe robot humanoïde + grand modèle a accompli pour la première fois la tâche d'exploitation de matériaux flexibles complexes tels que le pliage de vêtements. Avec le dévoilement de Figure01, qui intègre le grand modèle multimodal d'OpenAI, les progrès connexes des pairs nationaux ont attiré l'attention. Hier encore, UBTECH, le « stock numéro un de robots humanoïdes » en Chine, a publié la première démo du robot humanoïde WalkerS, profondément intégré au grand modèle de Baidu Wenxin, présentant de nouvelles fonctionnalités intéressantes. Maintenant, WalkerS, bénéficiant des capacités de grands modèles de Baidu Wenxin, ressemble à ceci. Comme la figure 01, WalkerS ne se déplace pas, mais se tient derrière un bureau pour accomplir une série de tâches. Il peut suivre les commandes humaines et plier les vêtements
 Rejoignez une nouvelle aventure Xianxia ! Le pré-téléchargement de 'Zhu Xian 2' 'Wuwei Test' est maintenant disponible
Apr 22, 2024 pm 12:50 PM
Rejoignez une nouvelle aventure Xianxia ! Le pré-téléchargement de 'Zhu Xian 2' 'Wuwei Test' est maintenant disponible
Apr 22, 2024 pm 12:50 PM
Le « Test d'inaction » du nouveau MMORPG féerique fantastique « Zhu Xian 2 » sera lancé le 23 avril. Quel genre de nouvelle histoire d'aventure féerique se produira sur le continent Zhu Xian des milliers d'années après l'œuvre originale ? Le monde immortel des six royaumes, une académie à plein temps pour cultiver des immortels, une vie libre pour cultiver des immortels et toutes sortes de divertissements dans le monde immortel attendent que les amis immortels l'explorent en personne ! Le pré-téléchargement "Wuwei Test" est maintenant ouvert. Les amis fées peuvent accéder au site officiel pour télécharger. Vous ne pouvez pas vous connecter au serveur de jeu avant le lancement du serveur. Le code d'activation peut être utilisé après le pré-téléchargement et l'installation. est terminé. "Zhu Xian 2" "Inaction Test" horaires d'ouverture : 23 avril 10h00 - 6 mai 23h59 Le nouveau chapitre d'aventure de conte de fées de la suite orthodoxe de Zhu Xian "Zhu Xian 2" est basé sur le roman "Zhu Xian" comme un modèle basé sur la vision du monde de l'œuvre originale, l'arrière-plan du jeu est défini.
 Mar 22, 2024 pm 08:51 PM
Mar 22, 2024 pm 08:51 PM
Les 10 robots humanoïdes suivants façonnent notre avenir : 1. ASIMO : Développé par Honda, ASIMO est l'un des robots humanoïdes les plus connus. Mesurant 4 pieds de haut et pesant 119 livres, ASIMO est équipé de capteurs avancés et de capacités d'intelligence artificielle qui lui permettent de naviguer dans des environnements complexes et d'interagir avec les humains. La polyvalence d'ASIMO le rend adapté à une variété de tâches, allant de l'assistance aux personnes handicapées à la réalisation de présentations lors d'événements. 2. Pepper : Créé par Softbank Robotics, Pepper vise à être un compagnon social pour les humains. Avec son visage expressif et sa capacité à reconnaître les émotions, Pepper peut participer à des conversations, aider dans les commerces de détail et même fournir un soutien pédagogique. Poivrons
 Le robot de balayage et de nettoyage Cloud Whale Xiaoyao 001 a un « cerveau » ! Expérience |
Apr 26, 2024 pm 04:22 PM
Le robot de balayage et de nettoyage Cloud Whale Xiaoyao 001 a un « cerveau » ! Expérience |
Apr 26, 2024 pm 04:22 PM
Les robots de balayage et de nettoyage sont l’un des appareils électroménagers intelligents les plus populaires auprès des consommateurs ces dernières années. La commodité d'utilisation qu'il apporte, voire l'absence d'opération, permet aux paresseux de libérer leurs mains, permettant aux consommateurs de « se libérer » des tâches ménagères quotidiennes et de consacrer plus de temps à ce qu'ils aiment. Une qualité de vie améliorée sous une forme déguisée. Surfant sur cet engouement, presque toutes les marques d'électroménager du marché fabriquent leurs propres robots de balayage et de nettoyage, rendant l'ensemble du marché des robots de balayage et de nettoyage très vivant. Cependant, l'expansion rapide du marché entraînera inévitablement un danger caché : de nombreux fabricants utiliseront la tactique de la mer de machines pour occuper rapidement plus de parts de marché, ce qui entraînera de nombreux nouveaux produits sans aucun point de mise à niveau. ce sont des modèles de "matriochka". Ce n'est pas une exagération. Cependant, tous les robots de balayage et de nettoyage ne sont pas
