
 Périphériques technologiques
IA
Analyse de l'état du marché et des tendances de développement de l'industrie chinoise des robots humanoïdes en 2023. Le marché des applications passera de domaines segmentés à des domaines à usage général.
Périphériques technologiques
IA
Analyse de l'état du marché et des tendances de développement de l'industrie chinoise des robots humanoïdes en 2023. Le marché des applications passera de domaines segmentés à des domaines à usage général.
Analyse de l'état du marché et des tendances de développement de l'industrie chinoise des robots humanoïdes en 2023. Le marché des applications passera de domaines segmentés à des domaines à usage général.

Principales sociétés cotées dans l'industrie des robots humanoïdes : (01810.HK);(002472.SZ);(688160.SH);(603728.SH);(300660.SZ);(300969.SZ);(688017 .SH );(002896.SZ);(300124.SZ);Machine-outil Qinchuan (000837.SZ);(300718.SZ);(002338.SZ);(002747.SZ) etc.
Données principales de cet article : Chaîne industrielle de l'industrie humanoïde en Chine, répartition de la valeur des pièces de base des humanoïdes en Chine, espace de localisation des pièces de base des robots humanoïdes en Chine
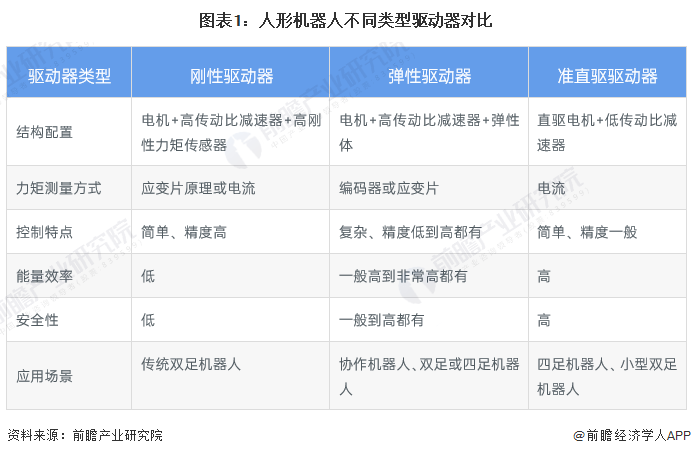
La solution à entraînement quasi-direct devrait devenir le premier choix pour certaines articulations
La solution actuelle utilise une structure d'actionneur rigide traditionnelle, caractérisée par une grande précision, mais la densité de puissance ne peut pas atteindre le niveau des muscles biologiques, la résistance aux chocs est moyenne et elle ne convient pas aux environnements géographiques complexes. En plus des actionneurs rigides, il existe également des actionneurs élastiques, un entraînement quasi-direct et d'autres solutions. L'algorithme de contrôle sera complexe et la précision est moyenne, mais la sécurité et l'efficacité sont considérablement améliorées. est utilisé plus fréquemment dans certaines solutions de chiens à quatre pattes et de robots humanoïdes.
Par rapport aux solutions d'entraînement rigides (moteur couple sans cadre + réducteur + capteur de force + encodeur), les solutions d'entraînement quasi-direct utilisent principalement des moteurs à entraînement direct avec des encodeurs magnétiques à réducteur planétaire à faible rapport de réduction, sans avoir besoin de capteurs de force coûteux directement dans la boucle de courant. réalise le contrôle de la force, il convient donc aux occasions qui nécessitent une précision de contrôle de force élevée, une réponse rapide et une résistance aux chocs. À l'heure actuelle, le robot étranger Artemis de l'UCLA a développé indépendamment quatre modules d'entraînement quasi direct pour les articulations de la hanche.
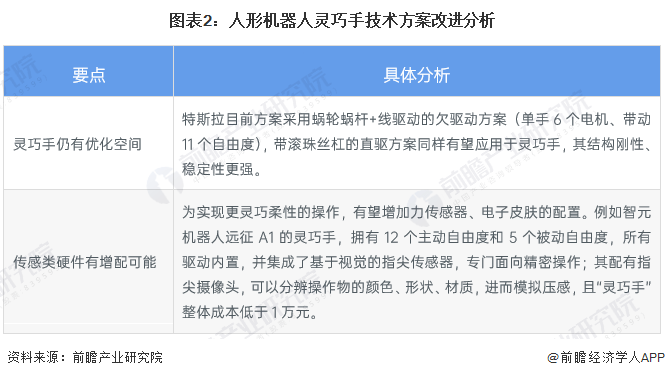
Des mains adroites devraient améliorer la dextérité grâce à des méthodes de transmission et de conduite améliorées
Actuellement, la main adroite de Tesla utilise une solution d'entraînement à vis sans fin, mais la main adroite a un plan de configuration plus riche. Selon la méthode de conduite, il couvre le schéma entièrement entraîné et sous-entraîné. Le système sous-entraîné est couramment utilisé. Le nombre de moteurs est inférieur aux degrés de liberté communs. Le système est de petite taille et léger. , peu coûteux et présente les avantages de la flexibilité pour résister aux impacts externes ; selon la transmission mécanique En termes de mode, il peut également être divisé en bielle, engrenage à vis sans fin, vis à billes et entraînement par courroie.
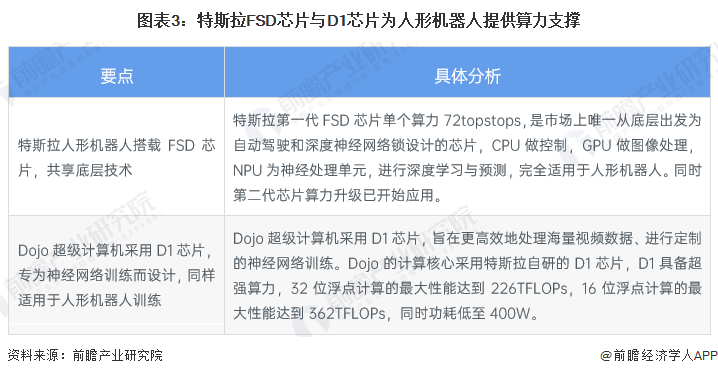
L'innovation et les progrès dans la technologie des puces favorisent le développement de robots humanoïdes
Les robots humanoïdes doivent intégrer une variété de capteurs, d'actionneurs, de systèmes de vision par ordinateur, de reconnaissance vocale et de contrôle et d'autres équipements, et doivent concevoir des algorithmes complexes de planification et de contrôle des mouvements. Ces dispositifs et algorithmes nécessitent des puces dotées d'une forte puissance de calcul, d'une faible consommation d'énergie, d'une petite taille et d'une intégration élevée. Par conséquent, en tant que composant central d’un robot humanoïde, la puce détermine directement les performances et les fonctionnalités du robot. En outre, la puce peut également améliorer les performances et l'efficacité du robot grâce à l'accélération matérielle, aux calculs de réseaux neuronaux, etc., et réaliser des fonctions de niveau supérieur, telles que la reconnaissance faciale, la traduction vocale, l'analyse émotionnelle, etc. Par conséquent, l’innovation et les progrès dans la technologie des puces favoriseront le développement de l’industrie des robots humanoïdes.
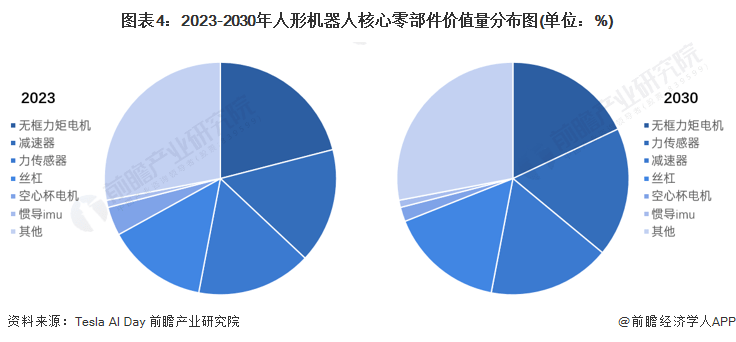
Les moteurs couple, les réducteurs et les capteurs de force sans cadre conserveront une valeur élevée
Selon les données du Tesla AI Day, en prenant Tesla Optimus comme exemple, les trois principaux composants de base des robots humanoïdes en valeur en 2023 sont les moteurs couple sans cadre, les réducteurs et les capteurs de force et en 2030, les moteurs couple sans cadre représenteront la valeur ; le rapport des capteurs de force et des réducteurs a augmenté, et la part en valeur des capteurs de force et des réducteurs a augmenté, et les capteurs de force dépasseront les réducteurs et occuperont la deuxième place, la part combinée des trois dépassant toujours 50 %.
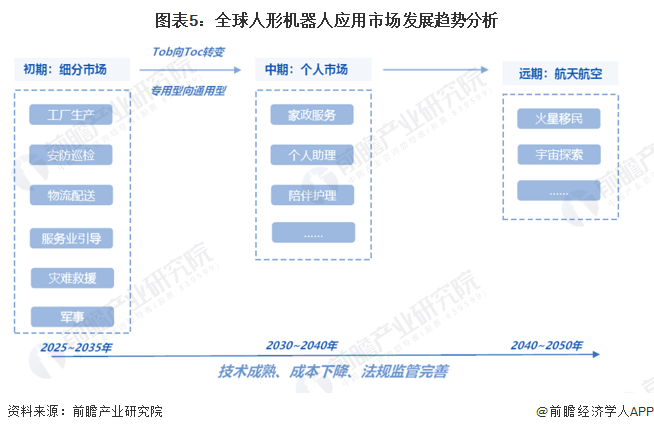
Le marché des applications pour robots humanoïdes passera des domaines de niche aux applications générales
En ce qui concerne la conduite autonome, il a fallu plus de 5 ans pour passer de la L1 à la L3, et la conduite entièrement autonome de la L5 prendra encore du temps. La maturité des robots humanoïdes est également progressive. Ils peuvent d'abord être commercialisés dans des segments de marché tels que la production en usine, les inspections de sécurité, la distribution logistique, l'orientation dans le secteur des services, le sauvetage, l'armée, etc. puis évoluent progressivement vers des robots à usage général, convertis de Tob en Toc, entrant dans des marchés tels que celui de l'entretien ménager. Dans un avenir plus lointain, les robots humanoïdes devraient être utilisés dans le domaine aérospatial.
Pour une recherche et une analyse plus détaillées de cette industrie, veuillez consulter le Prospective Industry Research Institute.
Dans le même temps, le Qianzhan Industry Research Institute propose également des conseils et d'autres solutions. La citation du contenu de cet article dans toute divulgation d'informations publiques telles que les prospectus et les rapports annuels de l'entreprise nécessite l'autorisation formelle de l'Institut de recherche industrielle de Qianzhan.
Une analyse plus approfondie de l'industrie est disponible dans [Foresight Economist APP], et vous pouvez également communiquer et interagir avec plus de 500 économistes/chercheurs principaux de l'industrie.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 J'ai essayé le codage d'ambiance avec Cursor Ai et c'est incroyable!
Mar 20, 2025 pm 03:34 PM
J'ai essayé le codage d'ambiance avec Cursor Ai et c'est incroyable!
Mar 20, 2025 pm 03:34 PM
Le codage des ambiances est de remodeler le monde du développement de logiciels en nous permettant de créer des applications en utilisant le langage naturel au lieu de lignes de code sans fin. Inspirée par des visionnaires comme Andrej Karpathy, cette approche innovante permet de dev
 Top 5 Genai Lunets de février 2025: GPT-4.5, Grok-3 et plus!
Mar 22, 2025 am 10:58 AM
Top 5 Genai Lunets de février 2025: GPT-4.5, Grok-3 et plus!
Mar 22, 2025 am 10:58 AM
Février 2025 a été un autre mois qui change la donne pour une IA générative, nous apportant certaines des mises à niveau des modèles les plus attendues et de nouvelles fonctionnalités révolutionnaires. De Xai's Grok 3 et Anthropic's Claude 3.7 Sonnet, à Openai's G
 Comment utiliser YOLO V12 pour la détection d'objets?
Mar 22, 2025 am 11:07 AM
Comment utiliser YOLO V12 pour la détection d'objets?
Mar 22, 2025 am 11:07 AM
Yolo (vous ne regardez qu'une seule fois) a été un cadre de détection d'objets en temps réel de premier plan, chaque itération améliorant les versions précédentes. La dernière version Yolo V12 introduit des progrès qui améliorent considérablement la précision
 Chatgpt 4 o est-il disponible?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o est-il disponible?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 est actuellement disponible et largement utilisé, démontrant des améliorations significatives dans la compréhension du contexte et la génération de réponses cohérentes par rapport à ses prédécesseurs comme Chatgpt 3.5. Les développements futurs peuvent inclure un interg plus personnalisé
 Google & # 039; s Gencast: Prévision météorologique avec Mini démo Gencast
Mar 16, 2025 pm 01:46 PM
Google & # 039; s Gencast: Prévision météorologique avec Mini démo Gencast
Mar 16, 2025 pm 01:46 PM
Gencast de Google Deepmind: une IA révolutionnaire pour les prévisions météorologiques Les prévisions météorologiques ont subi une transformation spectaculaire, passant des observations rudimentaires aux prédictions sophistiquées alimentées par l'IA. Gencast de Google Deepmind, un terreau
 Quelle IA est la meilleure que Chatgpt?
Mar 18, 2025 pm 06:05 PM
Quelle IA est la meilleure que Chatgpt?
Mar 18, 2025 pm 06:05 PM
L'article traite des modèles d'IA dépassant Chatgpt, comme Lamda, Llama et Grok, mettant en évidence leurs avantages en matière de précision, de compréhension et d'impact de l'industrie. (159 caractères)
 O1 vs GPT-4O: le nouveau modèle Openai est-il meilleur que GPT-4O?
Mar 16, 2025 am 11:47 AM
O1 vs GPT-4O: le nouveau modèle Openai est-il meilleur que GPT-4O?
Mar 16, 2025 am 11:47 AM
O1'S O1: Une vague de cadeaux de 12 jours commence par leur modèle le plus puissant à ce jour L'arrivée de décembre apporte un ralentissement mondial, les flocons de neige dans certaines parties du monde, mais Openai ne fait que commencer. Sam Altman et son équipe lancent un cadeau de don de 12 jours
 Comment utiliser Mistral OCR pour votre prochain modèle de chiffon
Mar 21, 2025 am 11:11 AM
Comment utiliser Mistral OCR pour votre prochain modèle de chiffon
Mar 21, 2025 am 11:11 AM
Mistral OCR: révolutionner la génération de la récupération avec une compréhension du document multimodal Les systèmes de génération (RAG) (RAG) de la récupération ont considérablement avancé les capacités d'IA, permettant à de vastes magasins de données pour une responsabilité plus éclairée
