
 Périphériques technologiques
IA
Ce robot à pattes de roue du Harbin Institute of Technology a sorti la version 3.0 ! Démystifier sa conception, ses contrôles et ses tests de performances
Périphériques technologiques
IA
Ce robot à pattes de roue du Harbin Institute of Technology a sorti la version 3.0 ! Démystifier sa conception, ses contrôles et ses tests de performances
Ce robot à pattes de roue du Harbin Institute of Technology a sorti la version 3.0 ! Démystifier sa conception, ses contrôles et ses tests de performances

Le
DARPA (U.S. Defence Advanced Research Projects Agency) Robot Challenge (DRC) a lieu tous les deux ans et est parrainé par le ministère américain de la Défense. Le concours espère sélectionner des robots capables d'assumer la responsabilité de dangers tels que l'énergie nucléaire de Fukushima. Plante inaccessible aux humains. Robots pour missions de premiers secours sur site.
Lors du DRC DARPA Robot Challenge 2015, le robot DRC-HUBO de Corée du Sud s'est appuyé sur ses "compétences uniques" pour vaincre 22 autres meilleurs robots de 5 pays et a remporté le championnat, dont de nombreux robots développés par Boston Dynamics à l'époque. Des robots vedettes tels que Atlas et Japan HRP.
DRC-HUBO est un robot qui peut à la fois se tenir debout et s'agenouiller
Dans le domaine de la robotique, L'équilibre de marchea toujours été une lacune insurmontable. C'est aussi la clé de la victoire finale de HUBO : Les roues installées sur ses genoux et ses chevilles peuvent permettre au robot de passer du mode marche au mouvement sur roues. L'équipe « KAIST » qui l'a développé a également remporté à l'époque un grand prix de 2 millions de dollars américains.
L'exploration et le sauvetage dans des environnements dangereux sont des applications importantes du mouvement des jambes des robots. Les robots utilisés pour le sauvetage en cas de catastrophe ou l'exploration sur le terrain doivent souvent avoir la capacité de se déplacer rapidement sur des routes plates et de s'adapter à des terrains complexes. Sur la base de ce problème, une équipe du Laboratoire clé d'État de robotique et de systèmes de l'École de génie mécanique et électrique de l'Institut de technologie de Harbin a développé un système de robot autonome à pattes de roue à entraînement hydraulique hautement maniable et hautement adaptable - le robot WLR-3P. Le robot peut se déplacer rapidement et efficacement sur des routes plates et son adaptabilité est excellente dans des environnements de terrain accidenté.
Cette recherche a été publiée sous le titre de l'article (Design and Control for WLR-3P: A Hydraulic Wheel-Legged Robot) dans Cyborg and Bionic Systems, un nouveau numéro du China Science and Technology Journal Excellence Action Plan High Starting Point.
▍Dévoilement du mystère du robot WLR-3P
Voyons d'abord à quoi ressemble le WLR-3P :

nouveau robot hydraulique à pattes de roue sans tuyau, WLR-3P est capable de sauter et de se déplacer rapidement avec une puissance autonome.
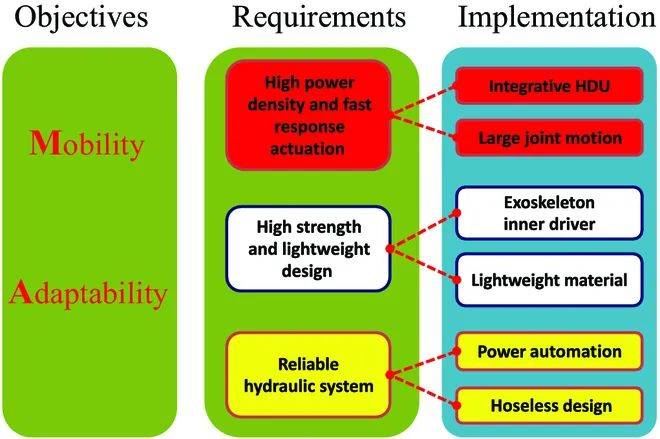
Alors, comment les chercheurs améliorent-ils lamobilité et l’adaptabilité environnementale des robots ? S'appuyant principalement sur cestrois points : (a) densité de puissance élevée et entraînement à réponse rapide, (b) poids léger, grande inertie et haute résistance, (c) système hydraulique fiable.
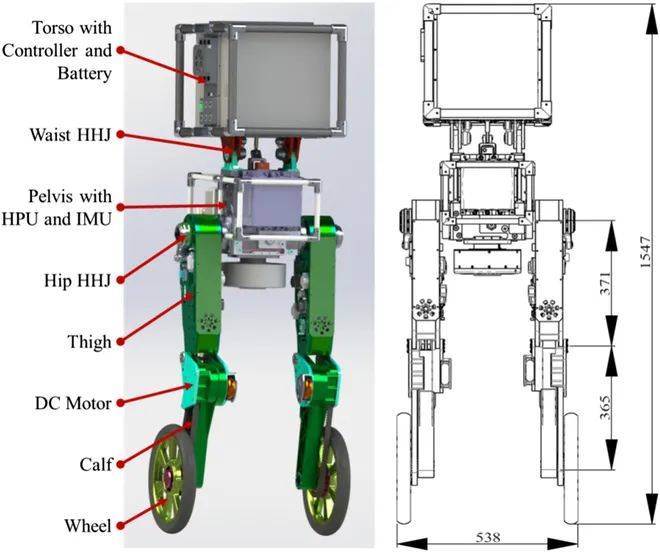
Comme le montre l'image ci-dessus, le WLR-3P dispose de 7 degrés de liberté (DOF) : 3 DOF pour chaque jambe et 1 DOF à la taille. Les trois degrés de liberté de la jambe se situent respectivement sur l'articulation de la hanche, l'articulation du genou et la roue motrice. L'articulation de la hanche et l'articulation du genou sont entraînées par HDU, et la roue motrice est entraînée par un moteur à courant continu.
HDU comprend un servo-cylindre personnalisé à réponse haute fréquence (20 Hz), une servovalve haute performance, un capteur de déplacement et un capteur de force. Le WLR-3P pèse 80 kg et est livré avec un HPU et une batterie intégrés. La hauteur maximale est de 1,55 mètre et la distance entre les deux roues est d'environ 0,54 mètre. De plus, pour des raisons de sécurité, le robot « porte » également un cadre en alliage d'aluminium hybride en fibre de carbone de 1,8 kg
Pourquoi choisir l’hydraulique ? Pour le dire simplement et grossièrement,
Un robot utilisant un dispositif d’entraînement hydraulique intégré a une densité de puissance élevée et une réponse d’entraînement rapide.
▍Stratégie avancée de conception et de contrôle du WLR-3P
Les chercheurs ont pris en compte les facteurs suivants : (a) un rapport puissance/poids élevé, (b) une excellente résistance aux chocs, (c) une réponse haute fréquence pour le contrôle force/position et (d) des propriétés biologiques comparables à celles des humains.
La densité de puissance maximale de l'unité d'entraînement hydraulique de l'articulation du genou (HDU) du WLR-3P peut atteindre environ 7 kW/kg, ce qui est beaucoup plus élevé que les moteurs traditionnels. Contenu réécrit : La densité de puissance maximale de l'unité d'entraînement hydraulique du genou (HDU) du WLR-3P est d'environ 7 kW/kg, dépassant de loin celle des moteurs conventionnels
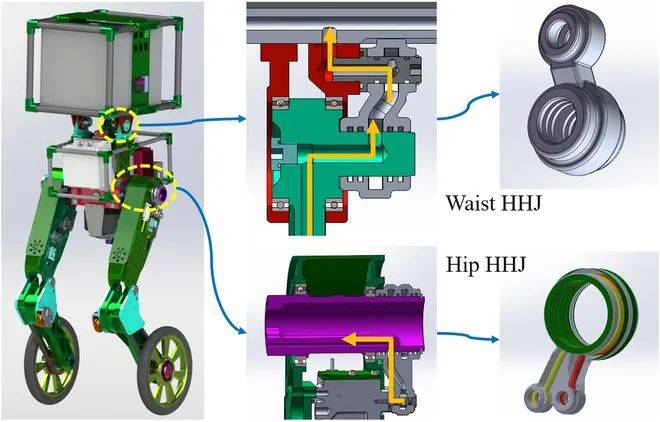
WLR-3P hanche et taille HHJ
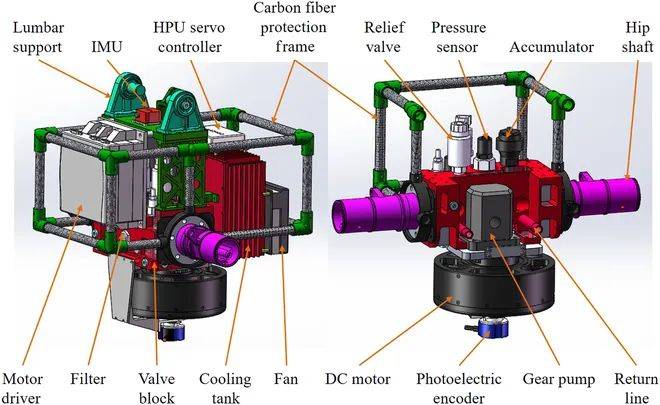
La miniaturisation et l'intégration des groupes hydrauliques (HPU) sont les principales difficultés dans le domaine de la recherche sur les robots hydrauliques, principalement dues à la miniaturisation des pompes et des moteurs ainsi que du chauffage des systèmes. Étant donné que le WLR-3P ne dispose pas d'un grand espace d'installation HPU. Le personnel de R&D a proposé une idée de conception innovante pour réaliser la miniaturisation et l'intégration du HPU.
Tout d'abord, la pompe à engrenages est entraînée par un moteur à rotor externe sur mesure via un micro-accouplement. L'huile haute pression de la pompe passe à travers un micro-accumulateur et un filtre pour fournir la puissance hydraulique requise par le système. Deuxièmement, afin de résoudre le problème de chauffage du système, un réservoir de carburant multifonctionnel intégrant dissipation thermique, filtration et stabilisation de tension a été conçu. Enfin, le HPU peut produire de la puissance hydraulique avec une pression maximale de 21 MPa et un débit de 20 l/min.
La figure ci-dessous montre la structure et la composition du HPU.
La miniaturisation et l'intégration du HPU libèrent le robot des limitations des tuyaux en caoutchouc, rendant le mouvement du robot plus « soyeux ».
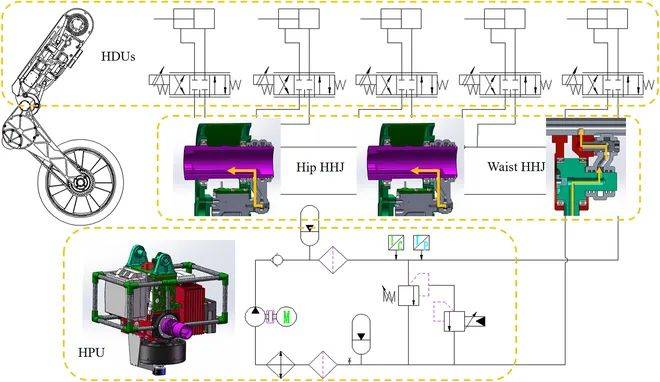
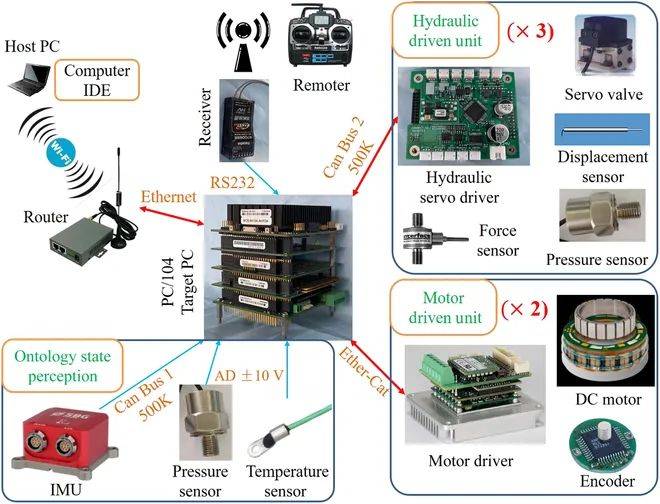
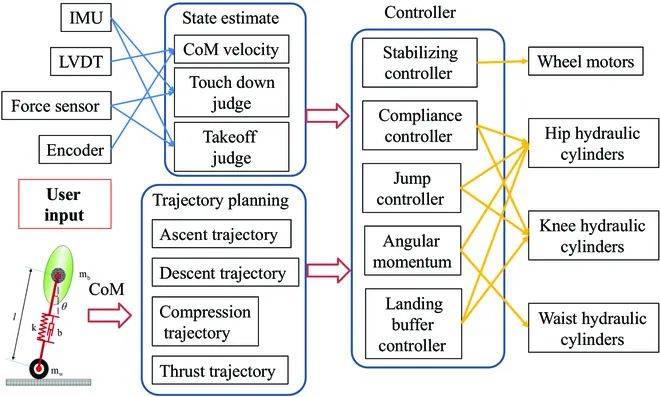
De plus, l'équipe R&D a également proposé
un système de contrôle comprenant un système électrique distribué hiérarchique et une stratégie de contrôle :
Le contenu qui doit être réécrit est : ▍Test d'équilibre et de puissance explosive du WLR-3P
Les chercheurs ont mené des tests autour deperformances équilibrées et puissance explosive. Mouvements rapides et accroupis sont les actions les plus élémentaires pour vérifier les performances d'équilibre du robot à roues. Lors d'un déplacement rapide, le centre de masse (COM) du robot change rapidement dans le sens horizontal, tandis qu'en s'accroupissant, le COM change rapidement dans le sens vertical.
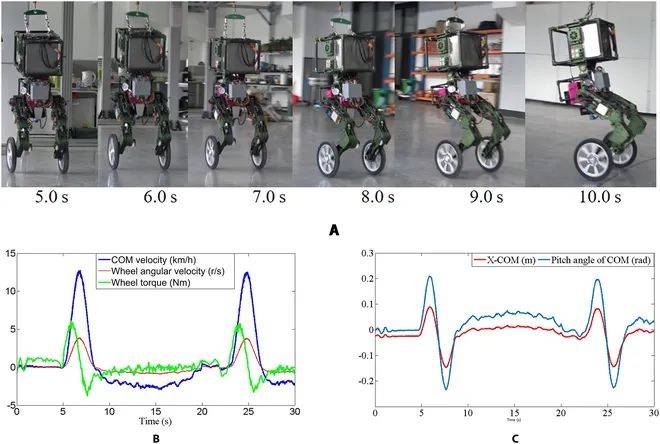
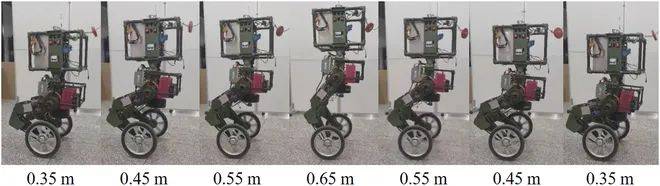
Le test montre que les capacités d'équilibrage horizontal et vertical du WLR-3P sont correctes, ce qui vérifie également la fiabilité du système matériel du robot.
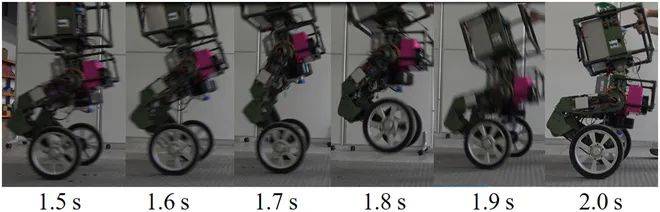
Les résultats expérimentaux montrent que le robot WLR-3P peut atteindre une vitesse de 13,6 km/h et une hauteur de saut de 0,2 m. L'entraînement hydraulique et les réglages structurels du robot sont entièrement certifiés.

plus le poids du robot est léger et plus la puissance explosive du système d'entraînement est forte, plus le robot peut sauter haut. En particulier, plus la proportion du poids des jambes par rapport au poids du corps est faible, plus la force de sortie instantanée et la vitesse de l'articulation du genou sont élevées, ce qui aura un impact plus significatif sur les performances de saut du robot.
Le contenu à réécrire est : ▍Les deux "frères" du WLR-3P
L'équipe a déclaré que même s'il existe encore un certain écart entre les performances réelles et les performances théoriques de conception, cela ouvre également la voie aux travaux futursEn 2017, l'équipe a développé le premier robot hydraulique à pattes de roue WLR-I et a vérifié avec succès sa conception intégrée et ses capacités de mouvement composé. Puis, en 2018, le robot à pattes de roue WLR-II de deuxième génération est sorti, réalisant pour la première fois une conception sans tuyau et démontrant une adaptabilité inattendue au terrain
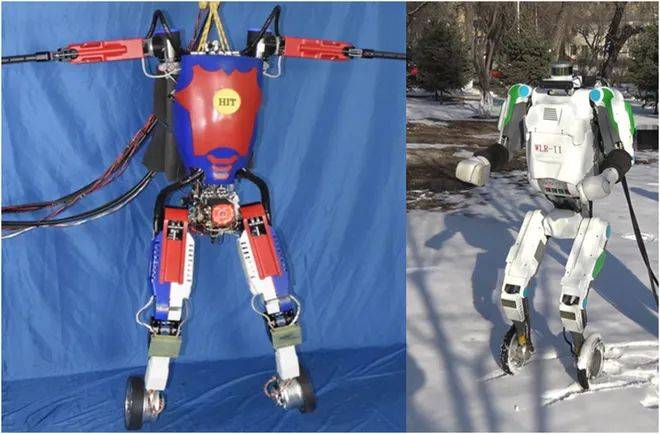
Deux frères effectuent des tests conjoints d'exercices et de mouvement de la neige
Comme le montre l'image ci-dessus, les deux premières générations de robots ont effectivement prouvé leur adaptabilité aux terrains complexes et leur maniabilité sur terrain plat, mais ils sont tous alimentés par des stations de pompage externes. Cette fois, le WLR-3P a apporté des améliorations substantielles basées sur la conception des deux premières générations de robots à pattes de roue. Non seulement améliore la capacité athlétique, mais atteint également l'autonomie de puissance.
Ensuite, l'équipe doit également réfléchir à la manière de faire correspondre la puissance de sortie du HPU et la puissance requise par le HDU. Concernant les exigences en matière de puissance motrice et de mouvement du robot, des problèmes d'ingénierie tels que la dissipation thermique et le bruit doivent être pris en compte. Plus important encore, la miniaturisation et la personnalisation des composants hydrauliques constituent également l’une des futures orientations de recherche.Je dois dire que l'efficacité est trop élevée. Alors sans plus tarder, accroupissez-vous et attendez le quatrième frère WLR.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Xiaohongshu commence à tester le chatbot IA « Da Vinci »
Jan 15, 2024 pm 12:42 PM
Xiaohongshu commence à tester le chatbot IA « Da Vinci »
Jan 15, 2024 pm 12:42 PM
Xiaohongshu s'efforce d'enrichir ses produits en ajoutant davantage de fonctionnalités d'intelligence artificielle. Selon les médias nationaux, Xiaohongshu teste en interne une application d'IA appelée « Davinci » dans son application principale. Il est rapporté que l'application peut fournir aux utilisateurs des services de chat IA tels que des questions et réponses intelligentes, notamment des guides de voyage, des guides gastronomiques, des connaissances géographiques et culturelles, des compétences de vie, une croissance personnelle et une construction psychologique, etc. Selon les rapports, "Davinci" utilise le modèle LLAMA sous le produit Meta A pour la formation, le produit est testé depuis septembre de cette année. Il y a des rumeurs selon lesquelles Xiaohongshu effectuait également un test interne d'une fonction de conversation de groupe par l'IA. Grâce à cette fonction, les utilisateurs peuvent créer ou introduire des personnages IA dans des discussions de groupe, et avoir des conversations et des interactions avec eux. Source de l'image : T.
 Résoudre le problème « erreur : expression primaire attendue avant le jeton ')' » dans le code C++
Aug 27, 2023 pm 12:28 PM
Résoudre le problème « erreur : expression primaire attendue avant le jeton ')' » dans le code C++
Aug 27, 2023 pm 12:28 PM
Résolvez le problème « erreur : expression primaire attendue avant')' jeton » dans le code C++. Dans la programmation C++, nous rencontrons parfois des invites d'erreur, telles que « expression primaire attendue avant')' jeton ». Cette erreur est généralement causée par une syntaxe ou des expressions incorrectes utilisées dans le code, empêchant le compilateur de comprendre la signification du code. Cet article sera
 Pourquoi la connexion réseau dans Win11 est-elle vide ?
Jan 11, 2024 pm 06:21 PM
Pourquoi la connexion réseau dans Win11 est-elle vide ?
Jan 11, 2024 pm 06:21 PM
En essayant de modifier la méthode de connexion réseau, certains utilisateurs ont découvert de manière inattendue que la carte réseau ouverte pendant le processus de commutation était vide, ce qui les empêchait de mener à bien l'opération de commutation. Face à un tel dilemme, comment devons-nous résoudre ce problème ? Que se passe-t-il avec la connexion réseau vide dans Win11 ? 1. Problème de pilote Le pilote de la carte réseau équipé sur l'ordinateur est incompatible avec l'environnement ou la version actuelle ou semble même l'être. trop ancien Solution : Mettez à niveau ou réinstallez le pilote de la carte réseau correspondant. 2. Problème matériel : le matériel de la carte réseau présente des dommages physiques, voire une panne complète. Solution : remplacez le matériel de la carte réseau d'origine. 3. Problème de configuration du système Solution à l’erreur de configuration du système Win11 sur l’ordinateur : nous pouvons.
 Comment désactiver Lenovo Win10 Firewall Introduction à la désactivation de Lenovo Win10 Firewall.
Jul 13, 2023 pm 01:33 PM
Comment désactiver Lenovo Win10 Firewall Introduction à la désactivation de Lenovo Win10 Firewall.
Jul 13, 2023 pm 01:33 PM
Comment désactiver le pare-feu Lenovo Win10 ? Les pare-feu peuvent offrir aux utilisateurs une expérience réseau informatique meilleure et plus sûre. Récemment, certains utilisateurs ont demandé comment désactiver le pare-feu sur les ordinateurs Lenovo Win10. En fait, la méthode est très simple. Jetons un coup d'œil à la méthode de fonctionnement avec l'éditeur ! Introduction à la désactivation du pare-feu Lenovo Win10 1. Cliquez sur Paramètres, entrez « Panneau de configuration » et ouvrez le « Panneau de configuration ». 2. Recherchez « Pare-feu Windows ». 3. Cliquez sur « Activer ou désactiver le pare-feu Windows Defender ». 4. Sélectionnez Fermer et confirmez.
 Compétences en matière de mise en œuvre de fonctions multitâches et de planification C++ dans le développement de systèmes embarqués
Aug 27, 2023 pm 03:42 PM
Compétences en matière de mise en œuvre de fonctions multitâches et de planification C++ dans le développement de systèmes embarqués
Aug 27, 2023 pm 03:42 PM
Compétences en matière de mise en œuvre de fonctions multitâches et de planification C++ dans le développement de systèmes embarqués. Les systèmes embarqués font référence à des systèmes informatiques qui sont intégrés dans d'autres appareils et servent de fonctions spécifiques. Ces systèmes doivent généralement gérer plusieurs tâches simultanément et effectuer une planification flexible des tâches. Dans le développement de systèmes embarqués, C++ est un langage de programmation largement utilisé qui offre de nombreuses fonctionnalités puissantes pour répondre aux besoins de multitâche et de planification. Cet article présentera quelques techniques de C++ pour implémenter le multitâche et la planification dans les systèmes embarqués, et l'expliquera à travers des exemples de code.
 Comment nettoyer le système Win7 lorsque le lecteur C de l'ordinateur est plein
Jul 09, 2023 pm 04:05 PM
Comment nettoyer le système Win7 lorsque le lecteur C de l'ordinateur est plein
Jul 09, 2023 pm 04:05 PM
Après avoir exécuté le système Win7 pendant un certain temps, j'ai constaté que l'espace disque C devenait de plus en plus petit. La taille de l'espace disque C est liée à la vitesse du système. Que doivent faire certains utilisateurs lorsqu’ils se trouvent dans une situation où le lecteur C du système Win7 est soudainement plein ? Laissez-moi vous apprendre à nettoyer le lecteur C sur un ordinateur Windows 7. 1. Faites un clic droit sur le lecteur C - Propriétés, l'écran suivant apparaîtra, cliquez sur Nettoyage de disque. 2. Lorsque l'écran suivant apparaît, vérifiez tout, cliquez sur OK et nettoyez directement. 3. Cliquez avec le bouton droit sur l'ordinateur - Propriétés - Protection du système, cliquez sur Configurer, puis sélectionnez Supprimer. 4. Basculez l'onglet sur Avancé et cliquez sur Paramètres. 5. Définissez la mémoire virtuelle et cliquez sur Modifier. 6. Décochez Gérer automatiquement la taille des fichiers d'échange pour tous les lecteurs, puis sélectionnez le lecteur C, sélectionnez Aucun fichier d'échange et définissez les paramètres de mémoire virtuelle sur
 Où ouvrir le Panneau de configuration Windows 7 Introduction détaillée aux parties d'ouverture du Panneau de configuration Windows 7
Jul 09, 2023 pm 12:45 PM
Où ouvrir le Panneau de configuration Windows 7 Introduction détaillée aux parties d'ouverture du Panneau de configuration Windows 7
Jul 09, 2023 pm 12:45 PM
De nombreux utilisateurs ne savent pas où ouvrir le panneau de configuration de Windows 7. En fait, il est très simple d'ouvrir le panneau de configuration de l'ordinateur Windows 7. Tout d'abord, nous cliquons avec le bouton droit de la souris pour ouvrir la page des propriétés de l'ordinateur. page, vous pouvez voir le panneau de configuration et cliquer pour l'ouvrir. C'est tout. Ouvrez le panneau de configuration de Windows 7 et vous pouvez effectuer une série de paramètres pour rendre le fonctionnement de l'ordinateur plus confortable et plus pratique. Introduction détaillée à l'ouverture du panneau de configuration de Windows 7 1. Cliquez avec le bouton droit sur l'icône du bureau de l'ordinateur 2. Cliquez sur [Propriétés] 3. Cliquez sur [Panneau de configuration] dans le répertoire auquel appartiennent les propriétés de l'ordinateur 4. Vous pouvez ouvrir la page de configuration du panneau de configuration
 Moteur de modèles de fonctions JavaScript : un outil puissant pour générer dynamiquement du HTML
Nov 18, 2023 pm 12:41 PM
Moteur de modèles de fonctions JavaScript : un outil puissant pour générer dynamiquement du HTML
Nov 18, 2023 pm 12:41 PM
Moteur de modèles de fonctions JavaScript : un outil puissant pour générer dynamiquement du HTML. Dans le développement front-end, la génération dynamique de HTML est une exigence courante, par exemple : afficher les résultats de recherche en fonction des informations saisies par l'utilisateur, rendre dynamiquement les pages en fonction des données entrantes. fond, etc Dans le développement front-end traditionnel, nous utilisons généralement la concaténation de chaînes pour générer du code HTML dynamique. Cependant, cette méthode présente de nombreuses limites, telles qu’une mauvaise lisibilité, une maintenance sujette aux erreurs et une maintenance difficile. Le moteur de modèles de fonctions JavaScript peut être très bon
