
 Périphériques technologiques
IA
Le drone Swift utilise la technologie de l'IA pour vaincre les meilleurs joueurs humains lors d'un événement FPV
Périphériques technologiques
IA
Le drone Swift utilise la technologie de l'IA pour vaincre les meilleurs joueurs humains lors d'un événement FPV
Le drone Swift utilise la technologie de l'IA pour vaincre les meilleurs joueurs humains lors d'un événement FPV

L'intelligence artificielle a une nouvelle fois vaincu le champion du monde humain, cette fois dans les courses de drones.
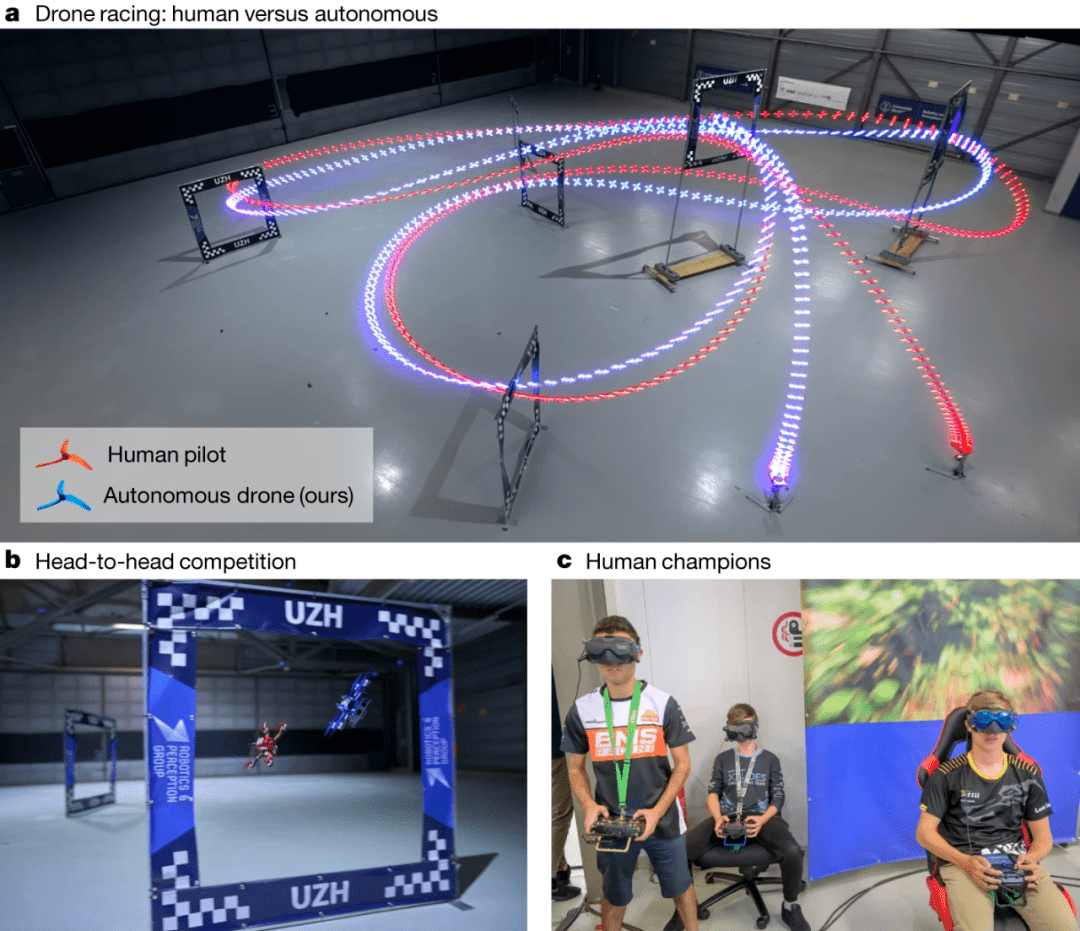
Cette réalisation majeure a été publiée dans les magazines "Nature" et "Science Robotics" par une équipe d'ingénieurs de l'Université de Zurich en Suisse. Après la première course contre un drone IA en 2011, aucun drone autonome ne pouvait battre un pilote humain jusqu'à l'arrivée de Swift. Swift a vaincu des joueurs humains champions du monde, dont le champion du monde 2019 de la Drone Racing League Alex Vanover, le double champion MultiGP International Open Thomas Bitmatta et le triple champion national suisse Marvin Schaepper
Dans le domaine virtuel, l'intelligence artificielle a vaincu les humains dans des jeux tels que les échecs, les dames, le Go et StarCraft. Maintenant, pour la première fois, il a également réussi à vaincre des humains dans un défi physique
Ce paragraphe a été réécrit comme suit : Ce jeu a été réalisé par un drone « First Person View » (FPV) équipé d'une caméra haute résolution. Un article a été publié dans le magazine Science Robotics détaillant la victoire historique remportée par l'équipe de développement du drone Swift. Dans une compétition acharnée avec trois drones concurrents, ce drone a remporté 15 des 25 défis. La personne en charge du projet a déclaré : « Nos résultats marquent la première fois qu'un robot piloté par l'IA bat des humains dans un événement d'expérience réel conçu pour les humains et dirigé par des humains. »

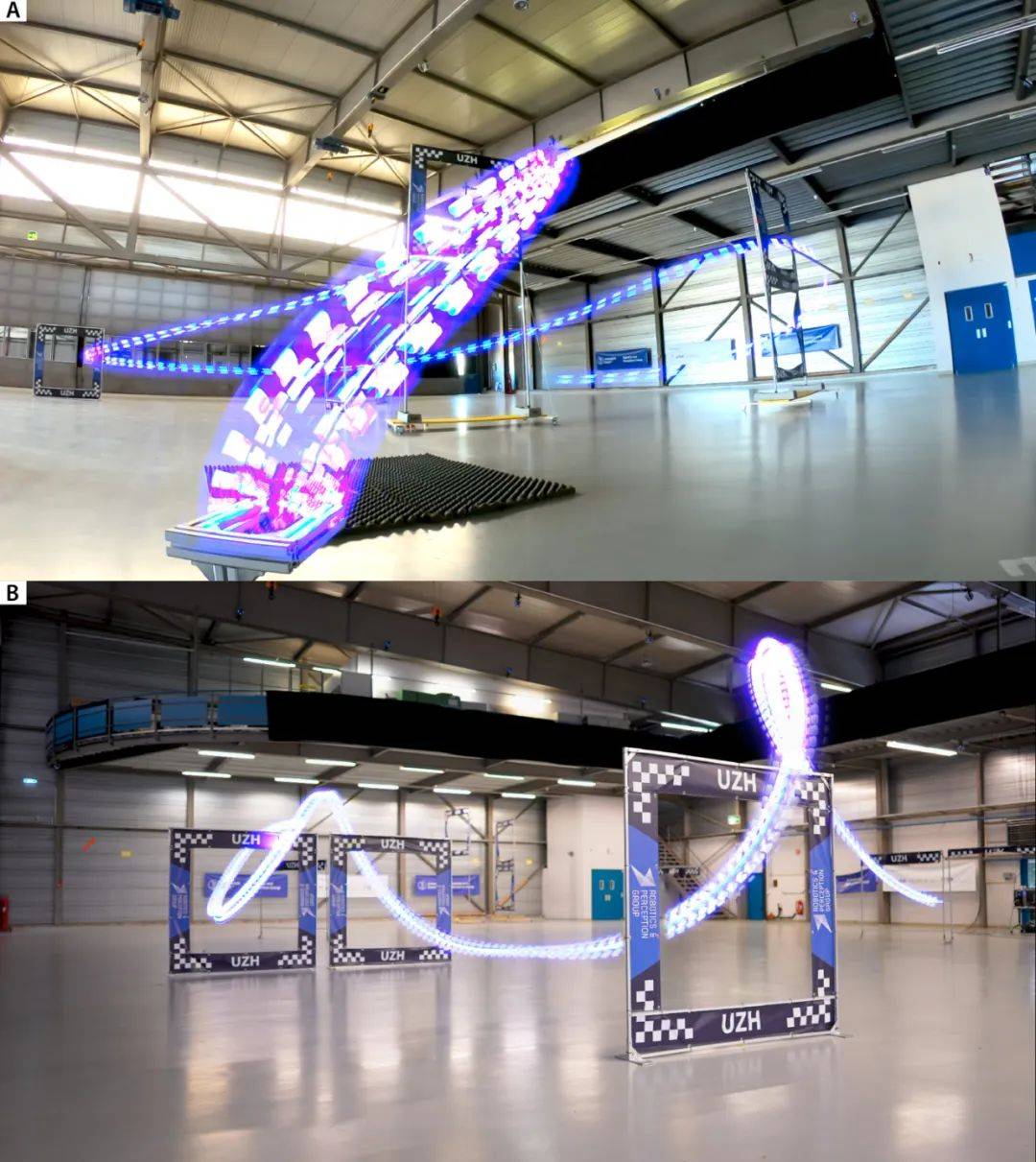
Dans cette course de drones, l'opérateur humain contrôle le drone via la piste 3D grâce à la caméra embarquée. L'innovation du système Swift réside dans la capacité de mapper l'état du drone aux commandes permettant d'ajuster la poussée et la vitesse de rotation. Cette réalisation constitue une étape importante dans le domaine de la robotique mobile et de l’intelligence artificielle.

Introduction à la technologie Swift
Swift est un quadricoptère contrôlé de manière autonome à l'aide uniquement de capteurs et d'ordinateurs embarqués. L'avion se compose de deux modules clés :
- Le système de perception convertit les informations visuelles et inertielles de grande dimension en représentations de basse dimension ;
- Stratégie de contrôle, ingère la représentation de basse dimension générée par le système de perception et génère des commandes de contrôle.
- Parmi eux, la stratégie de contrôle est représentée par un réseau neuronal à action directe et entraînée à l'aide d'un apprentissage par renforcement profond (RL) sur politique sans modèle
Compte tenu des différences de détection et de dynamique entre la simulation et le monde réel, l'optimisation des stratégies uniquement en simulation entraînera de moins bonnes performances réelles du drone. Par conséquent, l'équipe de recherche a décidé d'estimer un modèle de bruit empirique non paramétrique à l'aide de données collectées à partir de systèmes physiques
Les résultats de recherche montrent que ces modèles empiriques de bruit jouent un rôle positif dans le transfert réussi des stratégies de contrôle de la simulation à la réalité
Plus précisément, Swift convertit les lectures des capteurs de l'avion en commandes de contrôle. Ce processus de conversion comprend deux parties :
(1) Stratégie d'observation pour affiner les informations visuelles et inertielles de grande dimension en un codage de basse dimension spécifique à une tâche ;
(2) Stratégie de contrôle, convertir le codage en commandes de drone.Sur les 10 pertes enregistrées par Swift, 40 % étaient dues à des collisions avec des adversaires, 40 % étaient dues à des collisions avec des portes de compétition et 20 % étaient dues au fait d'être plus lents que les drones contrôlés par l'homme. Dans l'ensemble, Swift a remporté le plus de courses contre des drones contrôlés par l'homme, et a également établi le record de course le plus rapide, battant le meilleur temps d'un drone contrôlé par l'homme (A. Vanover) d'une demi-douzaine de secondes.
Bien que le Swift soit globalement plus rapide que tous les drones contrôlés par l'homme, il n'est pas plus rapide sur chaque segment de la piste.
Une analyse minutieuse réalisée par l'équipe de recherche a révélé que : lors du décollage, Swift a un temps de réaction plus court et décolle en moyenne 120 millisecondes plus tôt que les pilotes humains ; Swift accélère également plus rapidement et entre dans la première porte de compétition à une vitesse plus élevée. Dans les virages serrés, les mouvements du Swift sont plus serrés.
L'équipe de recherche a également proposé l'hypothèse selon laquelle Swift optimise les trajectoires sur des échelles de temps plus longues que les opérateurs humains. On sait qu’un apprentissage par renforcement sans modèle peut être réalisé en optimisant les récompenses à long terme. En comparaison, les opérateurs humains disposent d’un délai plus court pour planifier les mouvements et ne peuvent prédire qu’une seule porte de compétition dans le futur
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Classement des drones DJI 2024 : chaque modèle a été vendu à plus de 50 000 exemplaires, lequel avez-vous utilisé ?
Dec 16, 2023 pm 05:33 PM
Classement des drones DJI 2024 : chaque modèle a été vendu à plus de 50 000 exemplaires, lequel avez-vous utilisé ?
Dec 16, 2023 pm 05:33 PM
Bonjour, bonjour ! Je suis Yuan Haha, faites attention, du contenu plus passionnant vous attend. Avec les progrès continus de la technologie des drones, nous pouvons désormais acheter l'une des caméras 4K les plus importantes et les plus fiables avec un budget de plusieurs milliers de yuans. Des temps inimaginables il y a des années. Grâce aux efforts continus de DJI, Autel et d'autres sociétés, ce rêve est devenu une réalité. Le drone de choix est DJI Mavic 3 Pro. Ce drone offre non seulement un enregistrement ultra haute définition, mais offre également une excellente fréquence d'images et une longue durée de vie. durée de vie de la batterie. En plus de mon expérience personnelle, j’ai compilé quelques autres drones parmi lesquels vous pouvez choisir, sur la base de critiques positives sur le Web. Jetons maintenant un coup d’œil à ces options intéressantes. Meilleur drone dans l’ensemble : DJIMavic 3Pr.
 Essaims de drones : une technologie révolutionnaire pour les applications de défense
Nov 14, 2023 pm 08:53 PM
Essaims de drones : une technologie révolutionnaire pour les applications de défense
Nov 14, 2023 pm 08:53 PM
Résumé : Le Swarming est une technologie révolutionnaire qui implique le déploiement collaboratif de plusieurs systèmes sans pilote dans plusieurs domaines (terre, mer, air, espace). Les développements dans les nouvelles technologies de microélectronique, de guidage, de navigation, de capteurs et d’intelligence artificielle permettent aux microdrones à faible coût d’effectuer des missions difficiles. Lorsqu’ils sont combinés à de nouveaux processus de prise de décision, au suivi des cibles, aux technologies de communication et aux algorithmes, les essaims peuvent avoir un impact énorme sur le champ de bataille. Il peut également être utilisé pour fournir des capacités de surveillance continues et indétectables ainsi que des capacités de défense critiques, telles que l’interception de missiles de croisière. Cet article décrit les activités de recherche européennes dans le domaine de l’essaimage et approfondit les implications importantes qu’elles peuvent avoir pour la défense. Mots clés : drone, capacité autonome, suivi de cible,
 Le plus grand avion de transport sans pilote produit dans le pays a effectué avec succès son vol inaugural : équipé du moteur AEP100-A de China Aviation Engineering Group
Aug 23, 2024 am 07:32 AM
Le plus grand avion de transport sans pilote produit dans le pays a effectué avec succès son vol inaugural : équipé du moteur AEP100-A de China Aviation Engineering Group
Aug 23, 2024 am 07:32 AM
Selon les informations publiées sur ce site Web le 22 août, China Aviation Engine Group Co., Ltd. a publié aujourd'hui à 6 h 28 une annonce officielle concernant le turbopropulseur de 900 kilowatts AEP100-A, développé de manière totalement indépendante par China Aviation Industry. Corporation, a propulsé le grand avion de transport sans pilote SA750U dans le Shaanxi. Premier vol réussi. Selon certaines informations, le turbopropulseur AEP100-A a été conçu par l'Institut chinois de recherche en ingénierie aérospatiale et fabriqué dans le Sud. Il a la capacité de s'adapter aux températures et aux plateaux élevés. Il utilise une conception aérodynamique tridimensionnelle et une technologie de conception d'unités pour fournir. puissance pour les avions tout en améliorant l’économie de carburant. Améliorer l’efficacité opérationnelle globale de l’avion. La série de turbopropulseurs AEP100 peut être équipée d'avions polyvalents de 2 à 6 tonnes ou de véhicules aériens sans pilote de 3 à 10 tonnes, et ses performances globales ont atteint le niveau avancé international du même niveau actuellement en service. Ce site a signalé plus tôt
 Apple publie le package Swift open source pour le cryptage homomorphe, déployé dans iOS 18
Jul 31, 2024 pm 01:10 PM
Apple publie le package Swift open source pour le cryptage homomorphe, déployé dans iOS 18
Jul 31, 2024 pm 01:10 PM
Selon l'actualité du 31 juillet, Apple a publié hier (30 juillet) un communiqué de presse annonçant le lancement d'un nouveau package Swift open source (swift-homomorphic-encryption) permettant le cryptage homomorphe dans le langage de programmation Swift. Remarque : Le chiffrement homomorphe (HE) fait référence à un algorithme de chiffrement qui satisfait aux propriétés d'opération homomorphe du texte chiffré. Autrement dit, une fois les données chiffrées de manière homomorphe, des calculs spécifiques sont effectués sur le texte chiffré et les résultats de calcul du texte chiffré obtenus sont traités en même temps. Le texte en clair après le décryptage de l'état équivaut à effectuer directement le même calcul sur les données en texte en clair, obtenant ainsi « l'invisibilité » des données. La technologie de cryptage homomorphe peut calculer les données cryptées sans divulguer les données non cryptées sous-jacentes au processus opérationnel.
 Une idée entrepreneuriale d'IA adaptée aux programmeurs
Apr 09, 2024 am 09:01 AM
Une idée entrepreneuriale d'IA adaptée aux programmeurs
Apr 09, 2024 am 09:01 AM
Bonjour à tous, je m'appelle Casson. De nombreux amis programmeurs souhaitent participer au développement de leurs propres produits d’IA. Nous pouvons diviser la forme du produit en quatre quadrants en fonction du « degré d'automatisation des processus » et du « degré d'application de l'IA ». Parmi eux : le degré d'automatisation des processus mesure "la part du processus de service du produit qui nécessite une intervention manuelle" et le degré d'application de l'IA mesure "la proportion d'application de l'IA dans le produit". Premièrement, limiter la capacité de l'IA à traiter un Application d'image AI, et l'utilisateur la transmet via l'application. Le processus de service complet peut être complété en interagissant avec l'interface utilisateur, ce qui entraîne un degré élevé d'automatisation. Dans le même temps, le « traitement d'images IA » s'appuie fortement sur les capacités de l'IA, de sorte que son application est élevée. Le deuxième quadrant est le domaine conventionnel du développement d'applications, tel que le développement d'applications de gestion des connaissances, d'applications de gestion du temps et d'automatisation élevée des processus.
 le premier avion de transport sans pilote à grande échelle de Chine avec une charge supérieure à 3 tonnes, le « SA750U », a effectué avec succès son vol inaugural, avec des systèmes et des matériaux produits dans le pays
Aug 23, 2024 am 07:31 AM
le premier avion de transport sans pilote à grande échelle de Chine avec une charge supérieure à 3 tonnes, le « SA750U », a effectué avec succès son vol inaugural, avec des systèmes et des matériaux produits dans le pays
Aug 23, 2024 am 07:31 AM
Selon les informations de ce site du 22 août, selon le compte public officiel de "Shanhe Huayu", à 6h28 aujourd'hui, le gros avion de transport sans pilote SA750U développé indépendamment par Sunward Huayu Aviation Technology et complété par la coordination stratégique de Sunward Star Des compagnies aériennes ont décollé de Jingbian, Xi'an. Le centre d'essais expérimentaux de drones a effectué avec succès son premier vol. ▲ Source photo Compte public officiel "Shanhe Huayu", identique à celui ci-dessous. Selon les rapports, pendant le test en vol de 40 minutes, tous les équipements du système de l'avion ont fonctionné normalement et étaient en bon état. les performances étaient conformes aux spécifications de conception. Après avoir effectué les sujets de vol prévus. Ensuite, l'avion est revenu en douceur et le premier vol a été un succès complet. Le SA750U est le premier avion de transport sans pilote à grande échelle de Chine avec une charge de plus de 3 tonnes. Il n'a fallu que 2 ans et 8 mois à la société Shanhe Huayu pour terminer l'ensemble du processus, depuis la conception jusqu'au premier vol réussi du premier avion.
 Le drone Wing Loong reprend son envol et devient une station de base aérienne au Gansu
Dec 21, 2023 am 08:13 AM
Le drone Wing Loong reprend son envol et devient une station de base aérienne au Gansu
Dec 21, 2023 am 08:13 AM
Le drone Wing Loong-2H s'est de nouveau rendu dans le comté de Jishishan, dans la province du Gansu, pour effectuer des tâches de secours en cas de catastrophe telles que la reconnaissance des catastrophes et le soutien aux communications d'urgence. Ce type de drone est appelé « station de base aérienne » et peut restaurer en continu les réseaux de signaux du réseau public de China Mobile, China Unicom et Telecom, restaurer de manière directionnelle 50 kilomètres carrés de communications sur le réseau public et établir un réseau de communication audio et vidéo couvrant 15 000 habitants. kilomètres carrés. Le Wing Loong-2H s'est bien comporté lors du sauvetage en cas de fortes pluies de 2021 à Zhengzhou, Henan et lors du tremblement de terre de Luding en 2022 dans le Sichuan, et a terminé avec succès la mission. Source originale : CCTV Military Weibo.
 Drones de la série Domestic Wing Loong : écrire un nouveau chapitre dans les applications multi-domaines, couvrant de nombreux domaines tels que la météorologie, l'urgence et la sécurité
Dec 01, 2023 pm 05:47 PM
Drones de la série Domestic Wing Loong : écrire un nouveau chapitre dans les applications multi-domaines, couvrant de nombreux domaines tels que la météorologie, l'urgence et la sécurité
Dec 01, 2023 pm 05:47 PM
Selon Science and Technology Daily, le 28 novembre, sur le site de drones AVIC à Zigong, Sichuan, la Société de l'industrie aéronautique de Chine a organisé une journée portes ouvertes sur le thème « Le dragon ailé d'une grande puissance parcourt le monde » pour présenter des drones à grande échelle produits dans le pays. Réalisations en matière de développement de drones haut de gamme et de construction industrielle. Après plus de dix ans de développement, la série de produits UAV « Ptérosaure » produits dans le pays et développés indépendamment par AVIC UAV a formé un pedigree. Le Wing Loong-2 est apparu à la journée portes ouvertes de l'entreprise publique et a effectué une démonstration en vol. Le Wing Loong-2 est un système de drone polyvalent à moyenne et haute endurance développé par l'industrie aéronautique. Il dispose de capacités d'exécution de missions toute la journée, par tous les temps, sur tous les territoires et dans plusieurs scénarios. Ce système de drone est le premier système de drone à turbopropulseur à grande échelle produit dans le pays. Il présente une disposition aérodynamique, une structure de carrosserie et une structure de carrosserie avancées.
