
 Périphériques technologiques
IA
Améliorer les méthodes de planification de trajectoire pour la conduite autonome dans des environnements incertains
Périphériques technologiques
IA
Améliorer les méthodes de planification de trajectoire pour la conduite autonome dans des environnements incertains
Améliorer les méthodes de planification de trajectoire pour la conduite autonome dans des environnements incertains

Titre de la thèse : « Méthode de planification de trajectoire pour les véhicules autonomes dans des environnements incertains basée sur un contrôle prédictif amélioré des modèles »
Revue publiée : IEEE Transactions on Intelligent Transportation Systems
Date de publication : avril 2023
Ce qui suit, c'est moi Mes propres notes de lecture d'article sont principalement les parties qui, à mon avis, sont les points clés, pas la traduction du texte intégral. Cet article fait suite à l'article précédent et trie la partie vérification expérimentale de cet article. L'article précédent est le suivant : Ce qui suit sont mes propres notes de lecture d'article, principalement les parties qui, à mon avis, sont les points clés, et non la traduction du texte intégral. Cet article fait suite à l'article précédent et trie la partie vérification expérimentale de cet article. L'article précédent est le suivant :
fhwim : Une méthode de planification de trajectoire basée sur un contrôle prédictif de modèle amélioré pour les véhicules autonomes dans des environnements incertains
https://zhuanlan.zhihu.com/p/658708080
1 Vérification par simulation
.(1) Environnement de simulation
Les outils de co-simulation incluent Prescan, PyCharm, Matlab/Simulink, parmi lesquels Prescan est utilisé pour créer des scènes de trafic simulées, et PyCharm (avec réseau neuronal ou pytorch facilement) est utilisé pour écrire le module de prédiction de fusion , Matlab/Simulink (avec la boîte à outils MPC) est utilisé pour construire le module de planification de trajectoire et réaliser le contrôle du véhicule. L'idée globale de sélection des outils est relativement naturelle et raisonnable. Le contrôle horizontal utilisé pour contrôler cette partie est LQR, et le contrôle vertical utilisé PID, qui est également une méthode de contrôle relativement courante. L'encodeur-décodeur LSTM du module de prédiction de fusion utilise du code open source. L'auteur a déclaré qu'il provenait de la référence [31] Comprehensive Review of Neural Network-Based Prediction Intervals and New Advances, mais j'ai vu que cet article avait été publié en 2011. C'est un peu vieux (où était l'encodeur-décodage LSTM en 2011 ?). Je ne sais pas si l'auteur a modifié le code en fonction de cela.
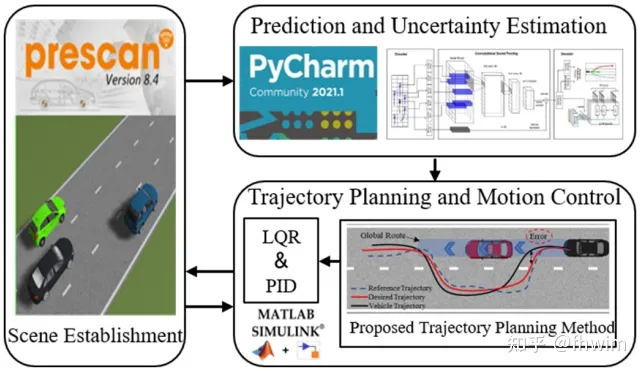
Figure 1 Configuration de l'environnement de simulation
(2) Obtention de l'ensemble MRPI


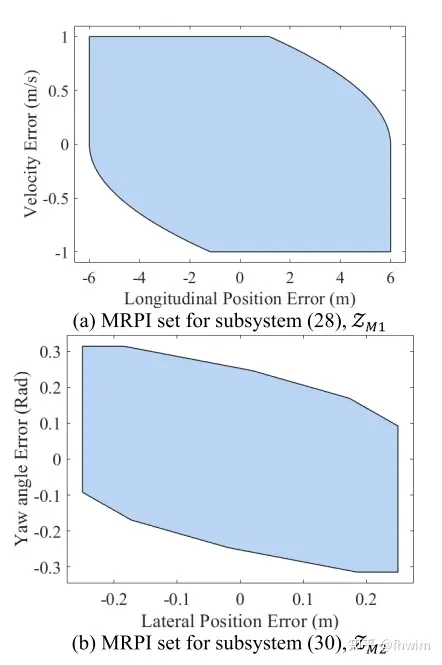
Figure 2 Ensemble MRPI du sous-système
(3) cas 1 : Scène d'obstacle d'évitement
La scène d'évitement d'obstacles statique fait référence à un véhicule d'obstacle à l'arrêt. Le résultat de la planification de la trajectoire est le suivant :
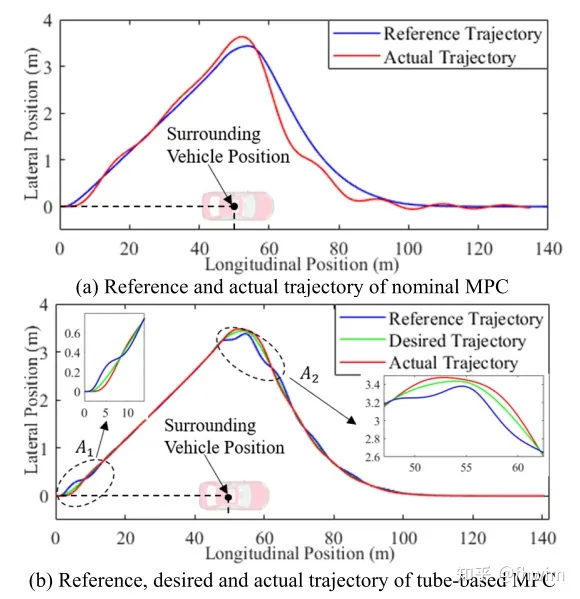
Comparez la méthode MPC générale et la méthode MPC basée sur un pipeline dans la figure 3
Ici, je soupçonne qu'il a une légende. Question, selon l'article précédent, la trajectoire finale de référence s'obtient en additionnant la trajectoire souhaitée et la trajectoire d'ajustement. Parallèlement, lors de l'analyse des résultats, il a également dit que le MPC à base de tube est dans les zones et. dans la figure 3(b). L'erreur est grande Puisque la trajectoire d'ajustement réduit l'erreur, il devrait être conforme à la logique de son article d'échanger les deux légendes de la trajectoire souhaitée et de la trajectoire de référence dans la figure 3(b). b), c'est-à-dire que la ligne verte est la trajectoire de référence finale. La ligne bleue est la trajectoire souhaitée du résultat intermédiaire. Y compris la courbe de vitesse et les courbes d'erreur horizontales et verticales ci-dessous, mais vous pouvez probablement comprendre ce que veut dire l'auteur. La courbe verte dans le MPC à tube est le résultat final, et la courbe bleue est le résultat sans trajectoire d'ajustement.
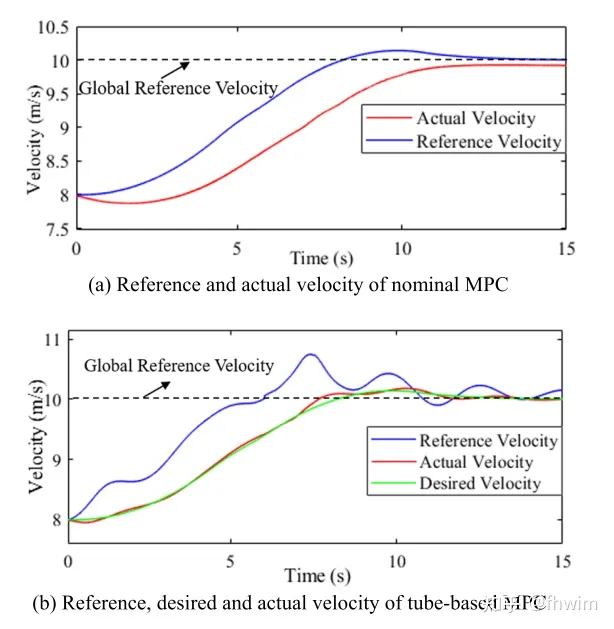
La figure 4 montre la comparaison des changements de vitesse entre la méthode MPC générale et la méthode MPC basée sur un pipeline
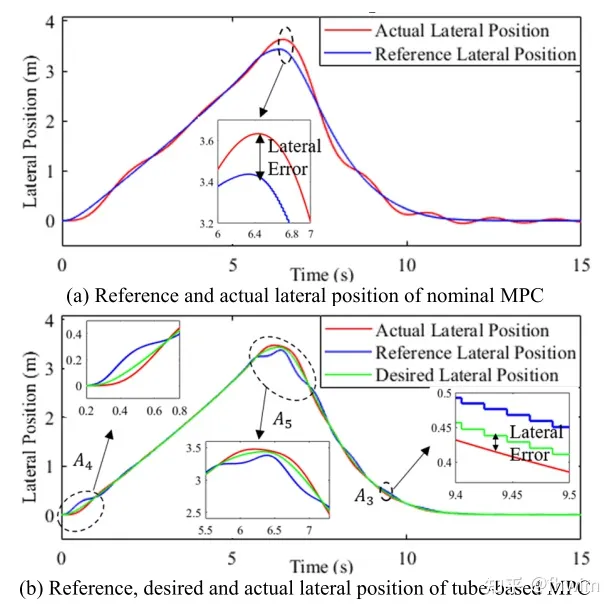
Figure 5 Comparaison des positions latérales
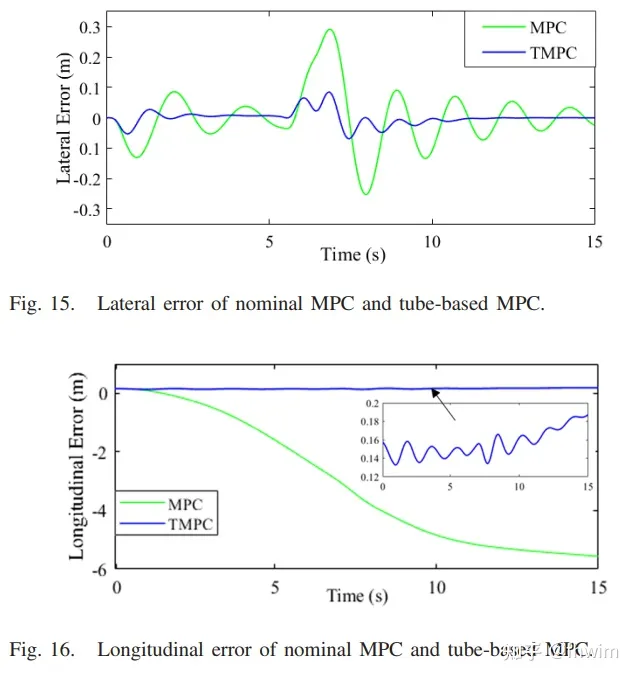
Le contenu qui doit être réécrit est : Comparaison des erreurs horizontales et verticales Figure 6
L'auteur a également comparé la fluidité des changements d'angle du volant, que je n'entrerai pas dans les détails ici. Bref, elle s'est améliorée. Dans le même temps, l'auteur a proposé une base théorique pour le bon effet de l'ajustement de la trajectoire, après l'avoir ajoutée, l'erreur de trajectoire se situe toujours dans l'ensemble MRPI, c'est-à-dire l'écart de suivi du contrôle prédictif du modèle basé sur le tube. (MPC basé sur un tube) est toujours dans l'ensemble MRPI. Le contrôle prédictif du modèle général (MPC) n'a pas de limite dans un environnement incertain, qui peut être très grand
(4) cas 2 : scène d'évitement d'obstacles dynamique
Par rapport à la scène précédente, maintenant la voiture à obstacles commence à bouger. Nous n'entrerons pas dans les détails de la trajectoire globale, des changements de vitesse, des erreurs horizontales et verticales et de la fluidité des changements de volant. Ici, seule une illustration de la trajectoire globale est présentée
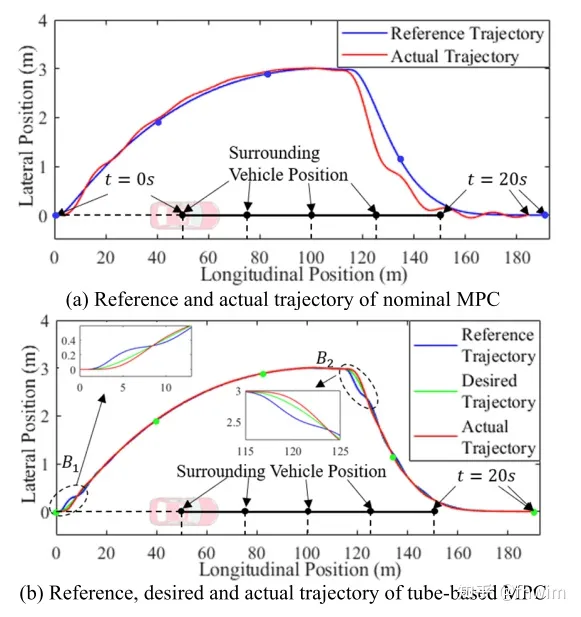
Figure 7 Comparaison de la trajectoire globale entre la méthode MPC générale et la méthode MPC à tube
(5) cas 3 : scène de conduite réelle
Ici, la l'auteur choisit d'utiliser l'ensemble de données NGSIM pour valider votre méthode. Premièrement, les auteurs ont validé la méthode de prédiction de fusion. L'ensemble de données NGSIM contient des données de trajectoire de véhicule, que l'auteur a divisées en trajectoires historiques et trajectoires futures, et a construit un ensemble de formation que l'encodeur-décodeur LSTM doit apprendre. L'auteur a sélectionné 10 000 trajectoires, dont 7 500 ont été utilisées comme ensemble d'entraînement et 2 500 comme ensemble de validation. L'optimiseur prend Adam et fixe le taux d'apprentissage à 0,01. L'effet de prédiction est illustré dans la figure ci-dessous
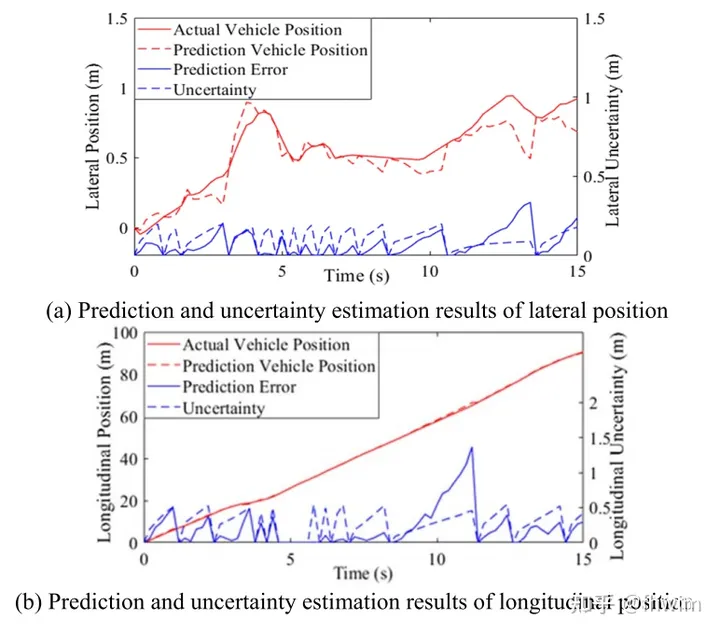
Figure 8 Résultats de la prédiction et de l'incertitude de trajectoire horizontale et verticale
Dans cet article, l'auteur n'a pas utilisé d'indicateurs couramment utilisés dans le domaine de la prédiction de trajectoire, tels que l'ADE, FDE, etc. Je pense que cette approche n'est pas convaincante, mais on peut également comprendre que cet article se concentre sur la planification de trajectoire basée sur un MPC basé sur un tube
Après avoir vérifié la prédiction de trajectoire, une planification de trajectoire a été effectuée pour vérifier davantage le rôle du module de prédiction de trajectoire. . Voici une comparaison. Il y a trois situations :
(a) Quand je connais déjà la véritable trajectoire future de la voiture obstacle, j'effectuerai une planification de trajectoire Cela sert de groupe de contrôle
Quand je ne connais pas l'avenir. trajectoire de la voiture à obstacle, je vais le faire d'abord Prédiction de trajectoire (mais pas calcul de l'incertitude), puis planification de trajectoire
(c) Quand je ne connais pas la trajectoire future de la voiture à obstacle, j'effectue d'abord une prédiction de trajectoire (calcul incertitude), puis planification de la trajectoire
La figure 9 montre les résultats de (a), (b) et (c), correspondant respectivement à la position vraie, aux résultats de prédiction et à la méthode proposée
La méthode proposée est le résultat obtenu par la méthode dans cet article. Vous pouvez voir que la méthode proposée est plus proche de True Position et montre que cette méthode de prédiction de fusion (en particulier le calcul de l'incertitude) est efficace.
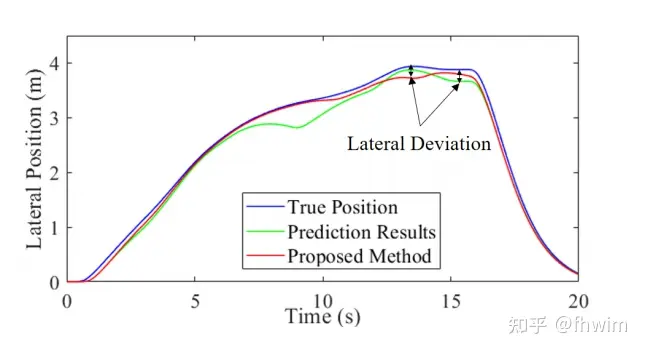
Figure 9 Comparaison de trois méthodes pour vérifier le module de prédiction de trajectoire
Ici vous pouvez trouver que le cas 1 et le cas 2 vérifient la partie planification de trajectoire La partie prédiction de trajectoire devant le contrôle prédictif du modèle général (MPC) et le pipeline. MPC basé sur un pipeline est le même, cette comparaison peut illustrer le rôle du MPC basé sur un pipeline. Le cas 3 consiste à vérifier le module de prédiction de trajectoire. Vous pouvez voir que deux types de vérification ont été effectués. Le premier type consiste à comparer directement la trajectoire prédite et la trajectoire réelle, et le deuxième type consiste d'abord à connaître la trajectoire future/à prédire la trajectoire future (sans calculer l'incertitude)/à prédire la trajectoire future (calculer l'incertitude), puis à effectuer la trajectoire planification. En utilisant la position réelle comme norme, les effets de la méthode de prédiction de trajectoire avec calcul d'incertitude et de la méthode de prédiction de trajectoire sans calcul d'incertitude sont comparés. Les idées de vérification pour ces deux modules sont encore très claires
2. Vérification expérimentale de véhicules réels
Le véhicule utilisé dans l'expérience est montré dans l'image ci-dessous :
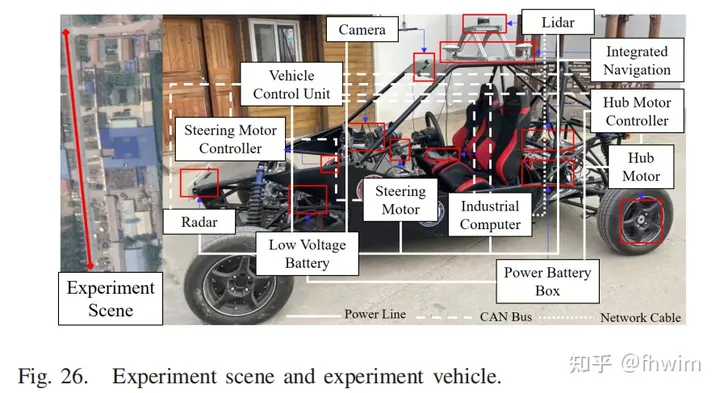
Le contenu qui doit être réécrit est : le véhicule utilisé dans l'expérience Image 10
L'auteur a également fourni les paramètres du véhicule expérimental et les paramètres de l'ordinateur et des capteurs utilisés dans l'expérience :
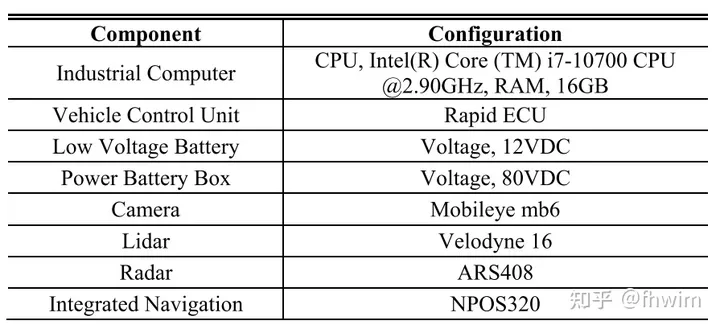
Le contenu qui doit être réécrit est : Figure 11 Le les paramètres de l'ordinateur et des capteurs
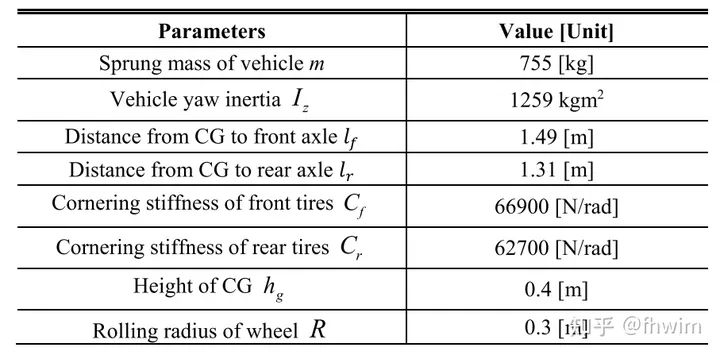
doivent être réécrits Le contenu est : Paramètres du véhicule expérimental, Figure 12
Par souci de sécurité, la scène expérimentale mise en place par l'auteur est la même que le cas d'expérience de simulation 1. Il s'agit d'une scène d'évitement d'obstacles statiques. Il est préférable de comparer la trajectoire globale, les changements de vitesse, les erreurs horizontales et verticales, et la douceur des changements de volant, qui ne sera pas décrite en détail.
3. Résumé de lecture
Tout d'abord, l'idée de l'article concerne le module de prédiction de trajectoire avec calcul d'incertitude et le module de planification de trajectoire basé sur MPC à tube. Parmi eux, le module de planification de trajectoire est le contenu principal. Je suis très satisfait de cette forme modulaire car elle applique véritablement la prédiction de trajectoire à la planification de trajectoire. La sortie de prédiction est utilisée comme entrée de planification, et le module de planification détermine uniquement un seuil de sécurité pour le module de prédiction, et le couplage entre les deux modules est faible. En d'autres termes, le module de prédiction peut être remplacé par d'autres méthodes dans la mesure où il peut fournir les résultats de prédiction de la trajectoire et de l'incertitude de la voiture à obstacles. À l’avenir, des réseaux de neurones plus avancés pourraient être envisagés pour prédire directement les trajectoires et les incertitudes. Dans l'ensemble, le processus de cet algorithme de prédiction de fusion est un peu compliqué, mais je pense que l'idée de l'article est très bonne. Les idées et la charge de travail de simulation et d'essais réels de véhicules sont également satisfaisantes
Deuxièmement, quelques erreurs de bas niveau ont été découvertes lors de la lecture de l'article. Par exemple, dans la partie encodeur-décodeur LSTM, la sortie LSTM est le point de trajectoire de la future étape, qui est également écrit dans la formule, mais dans le texte il est écrit comme .

Figure 13 Quelques erreurs dans la partie codeur-décodeur LSTM
Puis dans la partie expérience de simulation, lors du calcul de l'ensemble MRPI, il est dit que le système (21), c'est-à-dire le système d'erreurs, est divisé en sous-systèmes (32) et (34), mais en fait dans les sous-systèmes (30) et (32), ces petites erreurs n'affectent pas la méthode globale mais affecteront également l'expérience de lecture du lecteur.

Figure 14 Partie d'expérience de simulation MRPI Définir le texte original
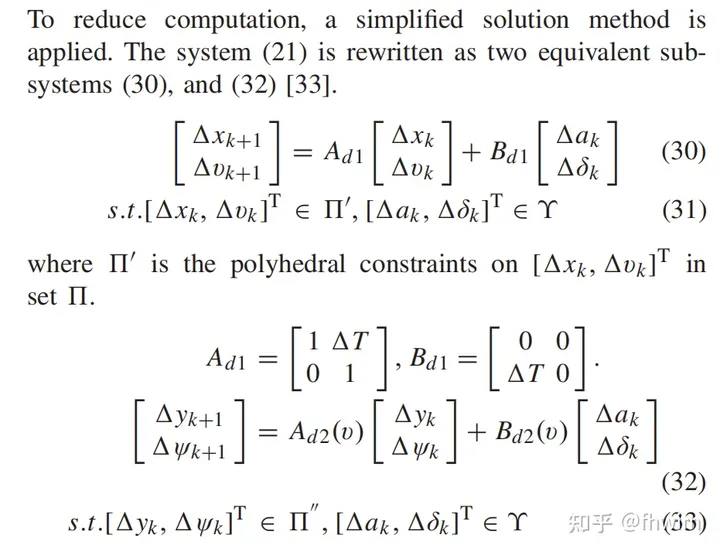
Le système d'erreur de la figure 15 est divisé en sous-systèmes (30) et (32)

Lien du texte original : https://mp .weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Écrit ci-dessus et compréhension personnelle de l'auteur Le Gaussiansplatting tridimensionnel (3DGS) est une technologie transformatrice qui a émergé dans les domaines des champs de rayonnement explicites et de l'infographie ces dernières années. Cette méthode innovante se caractérise par l’utilisation de millions de gaussiennes 3D, ce qui est très différent de la méthode du champ de rayonnement neuronal (NeRF), qui utilise principalement un modèle implicite basé sur les coordonnées pour mapper les coordonnées spatiales aux valeurs des pixels. Avec sa représentation explicite de scènes et ses algorithmes de rendu différenciables, 3DGS garantit non seulement des capacités de rendu en temps réel, mais introduit également un niveau de contrôle et d'édition de scène sans précédent. Cela positionne 3DGS comme un révolutionnaire potentiel pour la reconstruction et la représentation 3D de nouvelle génération. À cette fin, nous fournissons pour la première fois un aperçu systématique des derniers développements et préoccupations dans le domaine du 3DGS.
 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
0. Écrit à l'avant&& Compréhension personnelle que les systèmes de conduite autonome s'appuient sur des technologies avancées de perception, de prise de décision et de contrôle, en utilisant divers capteurs (tels que caméras, lidar, radar, etc.) pour percevoir l'environnement et en utilisant des algorithmes et des modèles pour une analyse et une prise de décision en temps réel. Cela permet aux véhicules de reconnaître les panneaux de signalisation, de détecter et de suivre d'autres véhicules, de prédire le comportement des piétons, etc., permettant ainsi de fonctionner en toute sécurité et de s'adapter à des environnements de circulation complexes. Cette technologie attire actuellement une grande attention et est considérée comme un domaine de développement important pour l'avenir des transports. . un. Mais ce qui rend la conduite autonome difficile, c'est de trouver comment faire comprendre à la voiture ce qui se passe autour d'elle. Cela nécessite que l'algorithme de détection d'objets tridimensionnels du système de conduite autonome puisse percevoir et décrire avec précision les objets dans l'environnement, y compris leur emplacement,
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un rôle important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contrôle de la planification en aval. La tâche de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer ! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus tôt possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R : Regardez d’abord l’enquête, p
 Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
L'article de StableDiffusion3 est enfin là ! Ce modèle est sorti il y a deux semaines et utilise la même architecture DiT (DiffusionTransformer) que Sora. Il a fait beaucoup de bruit dès sa sortie. Par rapport à la version précédente, la qualité des images générées par StableDiffusion3 a été considérablement améliorée. Il prend désormais en charge les invites multithèmes, et l'effet d'écriture de texte a également été amélioré et les caractères tronqués n'apparaissent plus. StabilityAI a souligné que StableDiffusion3 est une série de modèles avec des tailles de paramètres allant de 800M à 8B. Cette plage de paramètres signifie que le modèle peut être exécuté directement sur de nombreux appareils portables, réduisant ainsi considérablement l'utilisation de l'IA.
 SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
Titre original : SIMPL : ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Lien article : https://arxiv.org/pdf/2402.02519.pdf Lien code : https://github.com/HKUST-Aerial-Robotics/SIMPL Affiliation de l'auteur : Université des sciences de Hong Kong et technologie Idée DJI Paper : cet article propose une base de référence de prédiction de mouvement (SIMPL) simple et efficace pour les véhicules autonomes. Par rapport au cent agent traditionnel
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
