
 Périphériques technologiques
IA
Ensemble de données synthétiques sur la perception amodale AmodalSynthDrive : une solution innovante pour la conduite autonome
Périphériques technologiques
IA
Ensemble de données synthétiques sur la perception amodale AmodalSynthDrive : une solution innovante pour la conduite autonome
Ensemble de données synthétiques sur la perception amodale AmodalSynthDrive : une solution innovante pour la conduite autonome

- Lien de papier: https://arxiv.org/pdf/2309.06547.pdf
- Dataset Lien: http: //amodalsynthdrive.cs.uni-freiburg.de
abstract
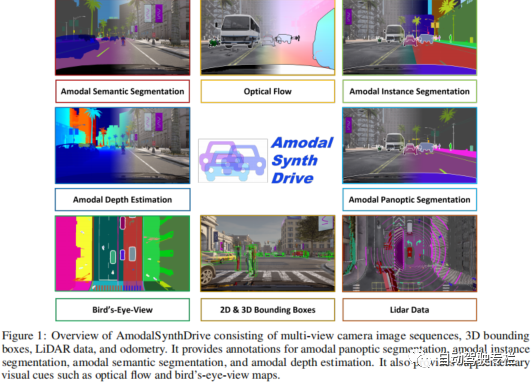
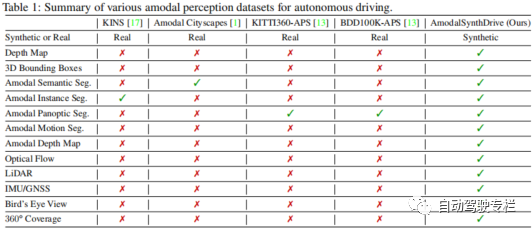
Cet article présente AmodalSynthDrive : un ensemble de données synthétiques de perception amodale pour la conduite autonome. Contrairement aux humains, qui peuvent facilement estimer l’intégralité d’un objet même en présence d’une occlusion partielle, les algorithmes modernes de vision par ordinateur trouvent encore cet aspect extrêmement difficile. L’exploitation de cette perception amodale pour la conduite autonome reste largement inexplorée en raison du manque d’ensembles de données adaptés. La génération de ces ensembles de données est principalement affectée par le coût élevé de l'annotation et par la nécessité d'atténuer les interférences causées par la subjectivité de l'annotateur dans l'étiquetage précis des zones masquées. Pour remédier à ces limitations, cet article présente AmodalSynthDrive, un ensemble de données synthétiques multitâches sur la perception amodale. L'ensemble de données fournit des images de caméra multi-vues, des cadres de délimitation 3D, des données lidar et une odométrie pour 150 séquences de conduite, y compris plus d'un million d'annotations d'objets dans diverses conditions de circulation, météorologiques et d'éclairage. AmodalSynthDrive prend en charge une variété de tâches de compréhension de scène amodale, y compris l'introduction de l'estimation de profondeur amodale pour améliorer la compréhension spatiale. Cet article évalue plusieurs références pour chaque tâche afin d'illustrer les défis et met en place un serveur de référence public.
Principales contributions
Les contributions de cet article sont résumées comme suit :
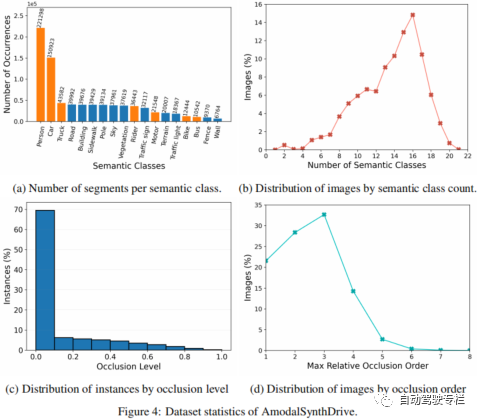
1) Cet article propose l'ensemble de données AmodalSynthDrive, un ensemble de données synthétique complet de perception amodale pour des scénarios de conduite urbaine avec plusieurs sources de données ;
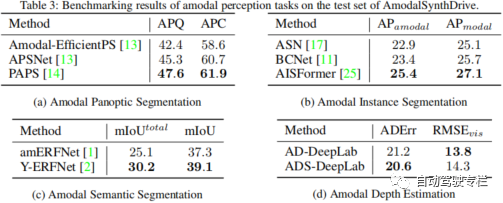
Cet article propose une référence pour les tâches de perception non modale, y compris la segmentation sémantique non modale, la segmentation d'instance non modale et la segmentation panoramique non modale
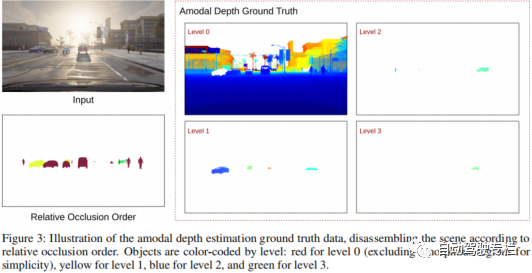
3) Le but de la nouvelle tâche d'estimation de profondeur non modale Dans la promotion d'une meilleure compréhension spatiale. Cet article démontre la faisabilité de cette nouvelle tâche à travers plusieurs références.
Images et tableaux en papier
Résumé
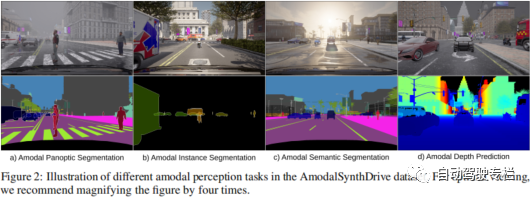
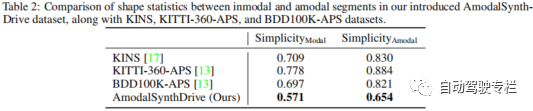
La perception est une tâche clé pour les véhicules autonomes, mais les méthodes actuelles manquent encore de la compréhension amodale nécessaire pour interpréter des scènes de circulation complexes. Par conséquent, cet article propose AmodalSynthDrive, un ensemble de données de perception synthétique multimodale pour la conduite autonome. Avec des images synthétiques et des nuages de points lidar, nous fournissons un ensemble de données complet qui comprend des données annotées de vérité terrain pour les tâches de base de perception amodale et introduisons une nouvelle tâche pour améliorer la compréhension spatiale appelée estimation de la profondeur amodale. Cet article fournit plus de 60 000 ensembles d'images individuels, chacun contenant une segmentation d'instance amodale, une segmentation sémantique amodale, une segmentation panoramique amodale, un flux optique, des cadres de délimitation 2D et 3D, une profondeur amodale et des données relatives aux figures à vol d'oiseau. Grâce à AmodalSynthDrive, cet article fournit diverses bases de référence et estime que ces travaux ouvriront la voie à de nouveaux types de recherche sur la compréhension des scènes amodales dans des environnements urbains dynamiques

Lien original : https://mp.weixin .qq.com /s/7cXqFbMoljcs6dQOLU3SAQ
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Le Bureau à distance ne peut pas authentifier l'identité de l'ordinateur distant
Feb 29, 2024 pm 12:30 PM
Le Bureau à distance ne peut pas authentifier l'identité de l'ordinateur distant
Feb 29, 2024 pm 12:30 PM
Le service Bureau à distance Windows permet aux utilisateurs d'accéder aux ordinateurs à distance, ce qui est très pratique pour les personnes qui doivent travailler à distance. Cependant, des problèmes peuvent survenir lorsque les utilisateurs ne peuvent pas se connecter à l'ordinateur distant ou lorsque Remote Desktop ne peut pas authentifier l'identité de l'ordinateur. Cela peut être dû à des problèmes de connexion réseau ou à un échec de vérification du certificat. Dans ce cas, l'utilisateur devra peut-être vérifier la connexion réseau, s'assurer que l'ordinateur distant est en ligne et essayer de se reconnecter. De plus, s'assurer que les options d'authentification de l'ordinateur distant sont correctement configurées est essentiel pour résoudre le problème. De tels problèmes avec les services Bureau à distance Windows peuvent généralement être résolus en vérifiant et en ajustant soigneusement les paramètres. Le Bureau à distance ne peut pas vérifier l'identité de l'ordinateur distant en raison d'un décalage d'heure ou de date. Veuillez vous assurer que vos calculs
 Publication du classement national CSRankings 2024 en informatique ! La CMU domine la liste, le MIT sort du top 5
Mar 25, 2024 pm 06:01 PM
Publication du classement national CSRankings 2024 en informatique ! La CMU domine la liste, le MIT sort du top 5
Mar 25, 2024 pm 06:01 PM
Les classements majeurs nationaux en informatique 2024CSRankings viennent d’être publiés ! Cette année, dans le classement des meilleures universités CS aux États-Unis, l'Université Carnegie Mellon (CMU) se classe parmi les meilleures du pays et dans le domaine de CS, tandis que l'Université de l'Illinois à Urbana-Champaign (UIUC) a été classé deuxième pendant six années consécutives. Georgia Tech s'est classée troisième. Ensuite, l’Université de Stanford, l’Université de Californie à San Diego, l’Université du Michigan et l’Université de Washington sont à égalité au quatrième rang mondial. Il convient de noter que le classement du MIT a chuté et est sorti du top cinq. CSRankings est un projet mondial de classement des universités dans le domaine de l'informatique initié par le professeur Emery Berger de la School of Computer and Information Sciences de l'Université du Massachusetts Amherst. Le classement est basé sur des objectifs
 Qu'est-ce que e dans l'ordinateur
Aug 31, 2023 am 09:36 AM
Qu'est-ce que e dans l'ordinateur
Aug 31, 2023 am 09:36 AM
Le « e » de l'ordinateur est le symbole de la notation scientifique. La lettre « e » est utilisée comme séparateur d'exposant en notation scientifique, ce qui signifie « multiplié à la puissance 10 ». En notation scientifique, un nombre s'écrit généralement sous la forme M ×. 10^E, où M est un nombre compris entre 1 et 10 et E représente l'exposant.
 Correctif : code d'erreur Microsoft Teams 80090016 Le module de plateforme approuvée de votre ordinateur a échoué
Apr 19, 2023 pm 09:28 PM
Correctif : code d'erreur Microsoft Teams 80090016 Le module de plateforme approuvée de votre ordinateur a échoué
Apr 19, 2023 pm 09:28 PM
<p>MSTeams est la plateforme de confiance pour communiquer, discuter ou appeler avec des coéquipiers et des collègues. Le code d'erreur 80090016 sur MSTeams et le message <strong>Le module de plateforme sécurisée de votre ordinateur a échoué</strong> peuvent entraîner des difficultés de connexion. L'application ne vous permettra pas de vous connecter tant que le code d'erreur n'est pas résolu. Si vous rencontrez de tels messages lors de l'ouverture de MS Teams ou de toute autre application Microsoft, cet article peut vous guider pour résoudre le problème. </p><h2&
 Que signifie ordinateur ?
Aug 15, 2023 am 09:58 AM
Que signifie ordinateur ?
Aug 15, 2023 am 09:58 AM
La signification de cu dans un ordinateur dépend du contexte : 1. Unité de contrôle, dans le processeur central d'un ordinateur, CU est le composant chargé de coordonner et de contrôler l'ensemble du processus informatique 2. Unité de calcul, dans un processeur graphique ou autre ; processeur accéléré, CU est l’unité de base pour le traitement des tâches de calcul parallèles.
 Impossible d'ouvrir l'objet Stratégie de groupe sur cet ordinateur
Feb 07, 2024 pm 02:00 PM
Impossible d'ouvrir l'objet Stratégie de groupe sur cet ordinateur
Feb 07, 2024 pm 02:00 PM
Parfois, le système d'exploitation peut mal fonctionner lors de l'utilisation d'un ordinateur. Le problème que j'ai rencontré aujourd'hui était que lors de l'accès à gpedit.msc, le système indiquait que l'objet de stratégie de groupe ne pouvait pas être ouvert car les autorisations appropriées pouvaient faire défaut. L'objet de stratégie de groupe sur cet ordinateur n'a pas pu être ouvert. Solution : 1. Lors de l'accès à gpedit.msc, le système indique que l'objet de stratégie de groupe sur cet ordinateur ne peut pas être ouvert en raison d'un manque d'autorisations. Détails : Le système ne parvient pas à localiser le chemin spécifié. 2. Une fois que l'utilisateur a cliqué sur le bouton de fermeture, la fenêtre d'erreur suivante apparaît. 3. Vérifiez immédiatement les enregistrements du journal et combinez les informations enregistrées pour découvrir que le problème réside dans le fichier C:\Windows\System32\GroupPolicy\Machine\registry.pol.
 Script Python pour se déconnecter de l'ordinateur
Sep 05, 2023 am 08:37 AM
Script Python pour se déconnecter de l'ordinateur
Sep 05, 2023 am 08:37 AM
À l’ère numérique d’aujourd’hui, l’automatisation joue un rôle essentiel dans la rationalisation et la simplification de diverses tâches. L'une de ces tâches consiste à se déconnecter de l'ordinateur, ce qui est généralement effectué manuellement en sélectionnant l'option de déconnexion dans l'interface utilisateur du système d'exploitation. Mais et si nous pouvions automatiser ce processus à l’aide d’un script Python ? Dans cet article de blog, nous explorerons comment créer un script Python capable de déconnecter votre ordinateur avec seulement quelques lignes de code. Dans cet article, nous passerons en revue le processus étape par étape de création d'un script Python pour vous déconnecter de votre ordinateur. Nous aborderons les conditions préalables nécessaires, discuterons des différentes manières de se déconnecter par programme et fournirons un guide étape par étape pour écrire le script. De plus, nous aborderons les considérations spécifiques à la plate-forme et mettrons en évidence les meilleures pratiques.
 Afin de fournir un nouveau système de référence et d'évaluation de questions-réponses scientifiques et complexes pour les grands modèles, l'UNSW, Argonne, l'Université de Chicago et d'autres institutions ont lancé conjointement le cadre SciQAG.
Jul 25, 2024 am 06:42 AM
Afin de fournir un nouveau système de référence et d'évaluation de questions-réponses scientifiques et complexes pour les grands modèles, l'UNSW, Argonne, l'Université de Chicago et d'autres institutions ont lancé conjointement le cadre SciQAG.
Jul 25, 2024 am 06:42 AM
L'ensemble de données ScienceAI Question Answering (QA) joue un rôle essentiel dans la promotion de la recherche sur le traitement du langage naturel (NLP). Des ensembles de données d'assurance qualité de haute qualité peuvent non seulement être utilisés pour affiner les modèles, mais également évaluer efficacement les capacités des grands modèles linguistiques (LLM), en particulier la capacité à comprendre et à raisonner sur les connaissances scientifiques. Bien qu’il existe actuellement de nombreux ensembles de données scientifiques d’assurance qualité couvrant la médecine, la chimie, la biologie et d’autres domaines, ces ensembles de données présentent encore certaines lacunes. Premièrement, le formulaire de données est relativement simple, et la plupart sont des questions à choix multiples. Elles sont faciles à évaluer, mais limitent la plage de sélection des réponses du modèle et ne peuvent pas tester pleinement la capacité du modèle à répondre aux questions scientifiques. En revanche, les questions et réponses ouvertes
