
 Périphériques technologiques
IA
Une revue des méthodes de planification de bout en bout pour la conduite autonome
Périphériques technologiques
IA
Une revue des méthodes de planification de bout en bout pour la conduite autonome
Une revue des méthodes de planification de bout en bout pour la conduite autonome

Cet article est réimprimé avec l'autorisation du compte public Heart of Autonomous Driving. Veuillez contacter la source originale pour la réimpression
1. Le plan de Woven Planet (filiale de Toyota) : Urban Driver 2021
Bien que cet article. a 21 ans, mais de nombreux nouveaux articles l'utilisent comme base de comparaison, il est donc également nécessaire de comprendre sa méthode
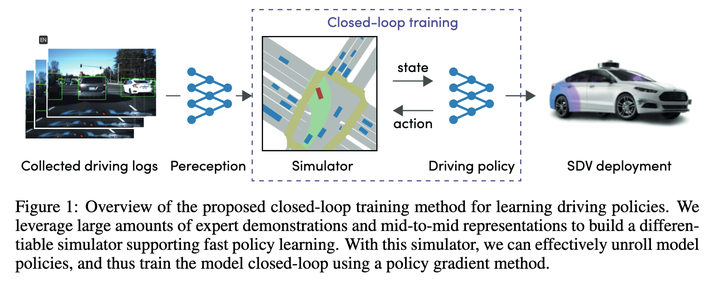
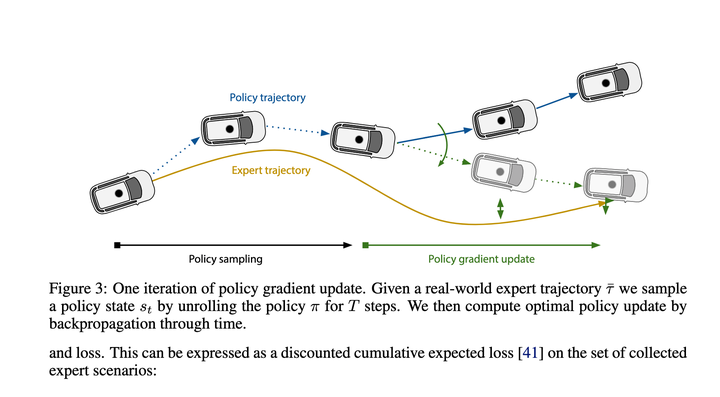
Après un examen approximatif, il utilise principalement les gradients de politique pour apprendre la fonction de cartographie de Etat->Action récente. Avec cette cartographie, la fonction peut déduire l'intégralité de la trajectoire d'exécution étape par étape. La perte finale est de rendre la trajectoire donnée par cette déduction aussi proche que possible de la trajectoire experte.
L'effet devrait être plutôt bon à ce moment-là, il peut donc devenir la base de référence pour de nouveaux algorithmes.
2. Plan 1 de l'Université technologique de Nanyang Planification prédictive conditionnelle du comportement avec apprentissage par renforcement inverse 2023.04
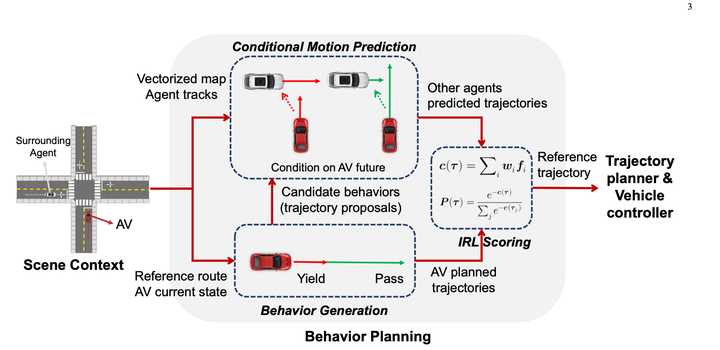
Utilisez d'abord des règles pour énumérer une variété de comportements et générer 10 à 30 trajectoires. (Résultats de prédiction non utilisés)
Utilisez la prédiction conditionnelle pour calculer les résultats de prédiction pour la trajectoire candidate de chaque véhicule hôte, puis utilisez IRL pour noter la trajectoire candidate.
Le modèle de prédiction conjointe conditionnelle ressemble à ceci :
Ce qui est fondamentalement génial avec cette méthode, c'est qu'elle utilise la prédiction conjointe conditionnelle pour compléter des prédictions interactives, donnant à l'algorithme une certaine capacité de jeu.
Mais je pense personnellement que le défaut de l'algorithme est que seulement 10 à 30 trajectoires étaient générées auparavant, et les prédictions n'étaient pas prises en compte lors de la génération des trajectoires, et au final, une de ces trajectoires sera directement sélectionnée comme résultat final après IRL notation, ce qui facilite la tâche pour 10 à 30 situations qui n'étaient pas idéales après avoir pris en compte les prédictions. Cela équivaut à choisir un général parmi les infirmes, et ceux choisis sont toujours des infirmes. Basé sur cette solution, ce sera un bon moyen de résoudre le problème de la qualité de la génération d'échantillons à l'avant. 3. Solution NVIDIA : 2023.02 Planification de politiques structurées en arborescence avec des modèles de comportement appris
Utilisation d'un échantillonnage d'arbre régulier, couche par couche. couche Pour un examen futur, générez une prédiction conditionnelle pour chaque sous-nœud de chaque couche, puis utilisez des règles pour noter les résultats de prédiction et la trajectoire principale du véhicule, et utilisez certaines règles pour éliminer les règles illégales, puis utilisez DP pour générer la trajectoire optimale. à l'avenir, l'idée DP est quelque peu similaire à dp_path_optimizer dans Apollo, mais ajoute une dimension temporelle.
Cependant, comme il y a une dimension supplémentaire, une fois l'expansion trop répétée, l'espace de solution sera toujours grand et le montant du calcul sera trop grand. La méthode écrite dans l'article actuel consiste à éliminer au hasard certains nœuds lorsqu'il y en a. il y a trop de nœuds. Assurez-vous que la quantité de calcul est contrôlable (on dirait que cela signifie que s'il y a trop de nœuds, cela peut être après n niveaux, et l'impact peut être relativement faible)La principale contribution de cet article. consiste à transformer un espace de solution continu en une décision markovienne grâce à ce processus de règle d'échantillonnage arborescent, puis à utiliser dp pour le résoudre.4. Dernier plan conjoint de l'Université technologique de Nanyang et de NVIDIA en octobre 2023 : DTPP : Prédiction conditionnelle conjointe différenciable et évaluation des coûts pour la planification des politiques d'arbres dans la conduite autonome
Le titre est très passionnant :
1. un certain effet de jeu2. Il est différentiable et peut renvoyer tout le gradient afin que les prédictions puissent être entraînées avec IRL. C'est également une condition nécessaire pour pouvoir construire une conduite autonome de bout en bout. Troisièmement, la planification des politiques arborescentes peut avoir certaines capacités de déduction interactives. Après l'avoir lu attentivement, j'ai trouvé cet article très informatif et la méthode très instructive. intelligent.
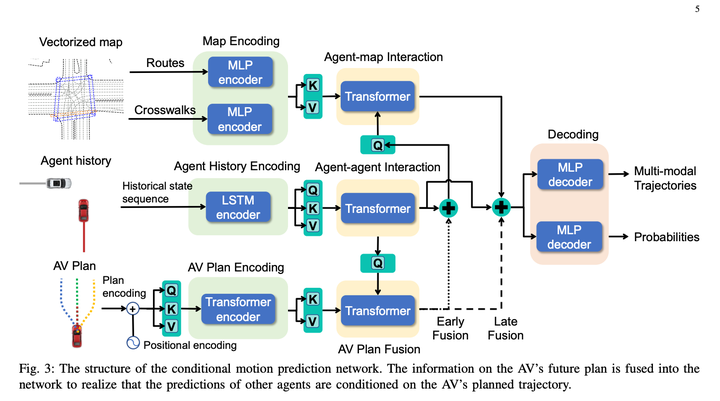
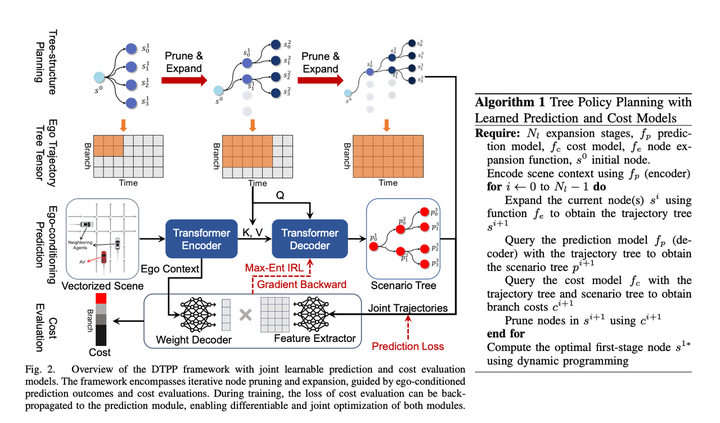 1. Le module de prédiction conditionnelle saisit une trajectoire historique du véhicule principal + une trajectoire rapide + une trajectoire historique du véhicule obstacle, et donne la trajectoire prédite du véhicule principal approchant de la trajectoire rapide et la trajectoire prédite du véhicule obstacle qui est cohérente. avec le comportement du véhicule principal.
1. Le module de prédiction conditionnelle saisit une trajectoire historique du véhicule principal + une trajectoire rapide + une trajectoire historique du véhicule obstacle, et donne la trajectoire prédite du véhicule principal approchant de la trajectoire rapide et la trajectoire prédite du véhicule obstacle qui est cohérente. avec le comportement du véhicule principal.
3. Module de recherche de politiques arborescentes, utilisé pour générer un ensemble de trajectoires candidates
L'algorithme de recherche arborescente est utilisé pour explorer la solution réalisable du véhicule principal. Chaque étape du processus d'exploration prend la trajectoire explorée comme entrée, utilise l'algorithme de prédiction conditionnelle pour générer les trajectoires prédites du véhicule principal et du véhicule obstacle, et appelle le module de notation pour évaluer l'excellence de la trajectoire est médiocre, affectant ainsi la direction de la prochaine recherche de nœuds d'expansion. Grâce à cette méthode, vous pouvez générer certaines trajectoires principales du véhicule qui sont différentes des autres solutions et prendre en compte l'interaction avec le véhicule obstacle lors de la génération des trajectoires.
L'IRL traditionnel crée manuellement de nombreuses fonctionnalités, telles qu'un ensemble de fonctionnalités avant et arrière Diverses caractéristiques des obstacles dans la dimension temporelle de la trajectoire (telles que s, l et ttc relatifs. Dans cet article, afin de rendre le modèle différenciable, le contexte ego MLP de prédiction est directement utilisé pour générer un tableau de poids (taille = 1 *). C), représente implicitement les informations environnementales autour du véhicule hôte, puis utilise MLP pour convertir directement la trajectoire du véhicule hôte + les résultats de prédiction multimodaux correspondants en un tableau de fonctionnalités (taille = C * N, N fait référence au nombre de trajectoires candidates ) , puis les deux matrices sont multipliées pour obtenir le score final de la trajectoire. Ensuite, IRL a laissé les experts marquer les points les plus élevés. Personnellement, je pense que cela peut être dû à l'efficacité du calcul, en rendant le décodeur aussi simple que possible, mais il y a quand même une certaine perte des informations principales du véhicule. Si vous ne faites pas attention à l'efficacité du calcul, vous pouvez utiliser des réseaux plus complexes pour le faire. connecter le contexte de l'ego et les trajectoires prédites, et le niveau d'effet devrait être meilleur ? Ou si vous abandonnez la différentiabilité, vous pouvez toujours envisager d'ajouter des fonctionnalités définies manuellement, ce qui devrait également améliorer l'effet du modèle.
En termes de temps, cette solution utilise une méthode d'un ré-encodage + plusieurs décodages légers, ce qui réduit avec succès les délais de calcul. L'article souligne que le délai peut être compressé à 98 millisecondes
Il appartient aux rangs SOTA parmi les planificateurs basés sur l'apprentissage, et l'effet en boucle fermée est proche du schéma PDM basé sur des règles n°1 de nuplan mentionné dans l'article précédent.
Résumé
En y regardant, je pense que ce paradigme est une bonne idée. Vous pouvez trouver des moyens d'ajuster le processus spécifique au milieu :
- Utilisez le modèle de prédiction pour guider certaines règles afin de générer de l'ego du candidat. trajectoires
- Pour chaque trajectoire, utilisez la prédiction conjointe conditionnelle pour faire des prédictions interactives et générer des prédictions d'agent. Peut améliorer les performances de jeu.
- IRL et d'autres méthodes utilisent les résultats de la prédiction conjointe conditionnelle pour noter la trajectoire précédente du véhicule principal et sélectionner la trajectoire optimale

Le contenu qui doit être réécrit est : Lien original : https://mp.weixin. qq.com/s/ZJtMU3zGciot1g5BoCe9Ow
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Écrit ci-dessus et compréhension personnelle de l'auteur Le Gaussiansplatting tridimensionnel (3DGS) est une technologie transformatrice qui a émergé dans les domaines des champs de rayonnement explicites et de l'infographie ces dernières années. Cette méthode innovante se caractérise par l’utilisation de millions de gaussiennes 3D, ce qui est très différent de la méthode du champ de rayonnement neuronal (NeRF), qui utilise principalement un modèle implicite basé sur les coordonnées pour mapper les coordonnées spatiales aux valeurs des pixels. Avec sa représentation explicite de scènes et ses algorithmes de rendu différenciables, 3DGS garantit non seulement des capacités de rendu en temps réel, mais introduit également un niveau de contrôle et d'édition de scène sans précédent. Cela positionne 3DGS comme un révolutionnaire potentiel pour la reconstruction et la représentation 3D de nouvelle génération. À cette fin, nous fournissons pour la première fois un aperçu systématique des derniers développements et préoccupations dans le domaine du 3DGS.
 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un rôle important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contrôle de la planification en aval. La tâche de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer ! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus tôt possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R : Regardez d’abord l’enquête, p
 Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
0. Écrit à l'avant&& Compréhension personnelle que les systèmes de conduite autonome s'appuient sur des technologies avancées de perception, de prise de décision et de contrôle, en utilisant divers capteurs (tels que caméras, lidar, radar, etc.) pour percevoir l'environnement et en utilisant des algorithmes et des modèles pour une analyse et une prise de décision en temps réel. Cela permet aux véhicules de reconnaître les panneaux de signalisation, de détecter et de suivre d'autres véhicules, de prédire le comportement des piétons, etc., permettant ainsi de fonctionner en toute sécurité et de s'adapter à des environnements de circulation complexes. Cette technologie attire actuellement une grande attention et est considérée comme un domaine de développement important pour l'avenir des transports. . un. Mais ce qui rend la conduite autonome difficile, c'est de trouver comment faire comprendre à la voiture ce qui se passe autour d'elle. Cela nécessite que l'algorithme de détection d'objets tridimensionnels du système de conduite autonome puisse percevoir et décrire avec précision les objets dans l'environnement, y compris leur emplacement,
 Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
L'article de StableDiffusion3 est enfin là ! Ce modèle est sorti il y a deux semaines et utilise la même architecture DiT (DiffusionTransformer) que Sora. Il a fait beaucoup de bruit dès sa sortie. Par rapport à la version précédente, la qualité des images générées par StableDiffusion3 a été considérablement améliorée. Il prend désormais en charge les invites multithèmes, et l'effet d'écriture de texte a également été amélioré et les caractères tronqués n'apparaissent plus. StabilityAI a souligné que StableDiffusion3 est une série de modèles avec des tailles de paramètres allant de 800M à 8B. Cette plage de paramètres signifie que le modèle peut être exécuté directement sur de nombreux appareils portables, réduisant ainsi considérablement l'utilisation de l'IA.
 SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
Titre original : SIMPL : ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Lien article : https://arxiv.org/pdf/2402.02519.pdf Lien code : https://github.com/HKUST-Aerial-Robotics/SIMPL Affiliation de l'auteur : Université des sciences de Hong Kong et technologie Idée DJI Paper : cet article propose une base de référence de prédiction de mouvement (SIMPL) simple et efficace pour les véhicules autonomes. Par rapport au cent agent traditionnel
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
