
 Périphériques technologiques
IA
Apprentissage automatique | Tutoriel concis PyTorch, partie 2
Périphériques technologiques
IA
Apprentissage automatique | Tutoriel concis PyTorch, partie 2
Apprentissage automatique | Tutoriel concis PyTorch, partie 2

Après l'article précédent"PyTorch Concise Tutorial Part 1", continuez à apprendre le perceptron multicouche, le réseau neuronal convolutif et LSTMNet.
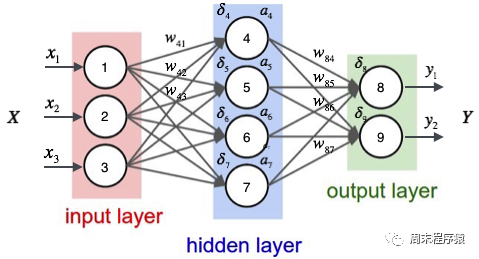
1. Perceptron multicouche
Le perceptron multicouche est un simple réseau neuronal et une base importante pour l'apprentissage profond. Il surmonte les limitations des modèles linéaires en ajoutant une ou plusieurs couches cachées au réseau. Le schéma spécifique est le suivant :
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistdef build_model(input_dim, output_dim):return torch.nn.Sequential(torch.nn.Linear(input_dim, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, output_dim, bias=False),)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples, n_features = trX.size()n_classes = 10model = build_model(n_features, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.Adam(model.parameters())batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1) Le code ci-dessus est similaire au code d'un réseau neuronal monocouche. La différence est que build_model construit un modèle de réseau neuronal contenant trois couches linéaires et deux activations ReLU. fonctions :
- Ajoutez la première couche linéaire au modèle. Le nombre d'entités d'entrée de cette couche est input_dim et le nombre d'entités de sortie est de 512
- Ajoutez ensuite une fonction d'activation ReLU et une couche Dropout pour améliorer les capacités non linéaires ; du modèle et éviter le surajustement Combiné ;
- Ajoutez une deuxième couche linéaire au modèle, le nombre d'entités d'entrée de cette couche est de 512 et le nombre d'entités de sortie est de 512
- Puis ajoutez une fonction d'activation ReLU et une ; Couche d'abandon ;
- Ajouter une troisième couche linéaire au modèle Une couche linéaire, le nombre d'entités d'entrée de cette couche est de 512 et le nombre d'entités de sortie est output_dim, qui est le nombre de catégories de sortie du modèle ; (2) Qu'est-ce que la fonction d'activation ReLU ? La fonction d'activation ReLU (Rectified Linear Unit) est une fonction d'activation couramment utilisée dans l'apprentissage profond et les réseaux de neurones. L'expression mathématique de la fonction ReLU est : f(x) = max(0, x), où x est la valeur d'entrée. La caractéristique de la fonction ReLU est que lorsque la valeur d'entrée est inférieure ou égale à 0, la sortie est 0 ; lorsque la valeur d'entrée est supérieure à 0, la sortie est égale à la valeur d'entrée. En termes simples, la fonction ReLU supprime la partie négative à 0 et laisse la partie positive inchangée. Le rôle de la fonction d'activation ReLU dans le réseau neuronal est d'introduire des facteurs non linéaires afin que le réseau neuronal puisse s'adapter à des relations non linéaires complexes. En même temps, la fonction ReLU a une vitesse de calcul et une vitesse de convergence rapides par rapport aux autres fonctions d'activation (telles que). comme Sigmoïde ou Tanh).
(3) Qu'est-ce que la couche Dropout ? La couche d'abandon est une technique utilisée dans les réseaux de neurones pour éviter le surajustement. Pendant le processus d'entraînement, la couche Dropout définira aléatoirement la sortie de certains neurones sur 0, c'est-à-dire "éliminera" ces neurones. Le but est de réduire l'interdépendance entre les neurones et ainsi d'améliorer la capacité de généralisation du réseau.
(4)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY))) Enfin , le cycle d'entraînement en cours, la valeur de perte et les acc sont imprimés. Le résultat du code ci-dessus est le suivant :
...Epoch 91, cost = 0.011129, acc = 98.45%Epoch 92, cost = 0.007644, acc = 98.58%Epoch 93, cost = 0.011872, acc = 98.61%Epoch 94, cost = 0.010658, acc = 98.58%Epoch 95, cost = 0.007274, acc = 98.54%Epoch 96, cost = 0.008183, acc = 98.43%Epoch 97, cost = 0.009999, acc = 98.33%Epoch 98, cost = 0.011613, acc = 98.36%Epoch 99, cost = 0.007391, acc = 98.51%Epoch 100, cost = 0.011122, acc = 98.59%
On peut voir que la même classification finale des données a une précision supérieure à celle du réseau neuronal monocouche (98,59 % > 97,68). %).
2. Réseau neuronal convolutif
Le réseau neuronal convolutif (CNN) est un algorithme d'apprentissage en profondeur. Lorsqu'une matrice est saisie, CNN peut faire la distinction entre les parties importantes et sans importance (attribuer des poids). Par rapport à d'autres tâches de classification, CNN ne nécessite pas de prétraitement élevé des données. Tant qu'il est entièrement formé, il peut apprendre les caractéristiques de la matrice. La figure suivante montre le processus :
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()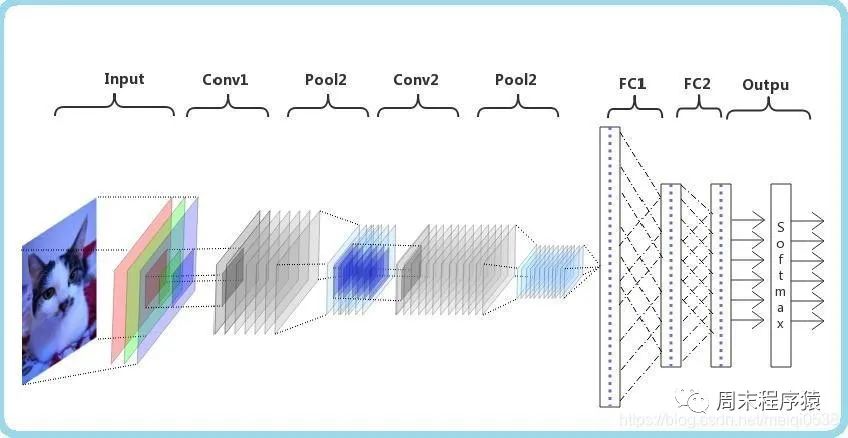 (1) Le code ci-dessus définit une classe nommée ConvNet, qui hérite de la classe torch.nn.Module et représente un réseau neuronal convolutif dans la méthode __init__ Deux sous-modules conv et fc sont définis, représentant respectivement la couche convolutive et la couche entièrement connectée. Dans le sous-module conv, nous définissons deux couches convolutives (torch.nn.Conv2d), deux couches de pooling maximum (torch.nn.MaxPool2d), deux fonctions d'activation ReLU (torch.nn.ReLU) et une couche Dropout (torch.nn. Abandonner). Dans le sous-module fc, deux couches linéaires (torch.nn.Linear), une fonction d'activation ReLU et une couche Dropout sont définies
(1) Le code ci-dessus définit une classe nommée ConvNet, qui hérite de la classe torch.nn.Module et représente un réseau neuronal convolutif dans la méthode __init__ Deux sous-modules conv et fc sont définis, représentant respectivement la couche convolutive et la couche entièrement connectée. Dans le sous-module conv, nous définissons deux couches convolutives (torch.nn.Conv2d), deux couches de pooling maximum (torch.nn.MaxPool2d), deux fonctions d'activation ReLU (torch.nn.ReLU) et une couche Dropout (torch.nn. Abandonner). Dans le sous-module fc, deux couches linéaires (torch.nn.Linear), une fonction d'activation ReLU et une couche Dropout sont définies
La couche de pooling joue un rôle important dans CNN, et ses principaux objectifs sont les suivants : :
- 降低维度:池化层通过对输入特征图(Feature maps)进行局部区域的下采样操作,降低了特征图的尺寸。这样可以减少后续层中的参数数量,降低计算复杂度,加速训练过程;
- 平移不变性:池化层可以提高网络对输入图像的平移不变性。当图像中的某个特征发生小幅度平移时,池化层的输出仍然具有相似的特征表示。这有助于提高模型的泛化能力,使其能够在不同位置和尺度下识别相同的特征;
- 防止过拟合:通过减少特征图的尺寸,池化层可以降低模型的参数数量,从而降低过拟合的风险;
- 增强特征表达:池化操作可以聚合局部区域内的特征,从而强化和突出更重要的特征信息。常见的池化操作有最大池化(Max Pooling)和平均池化(Average Pooling),分别表示在局部区域内取最大值或平均值作为输出;
(3)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.047302, acc = 99.22%Epoch 92, cost = 0.049026, acc = 99.22%Epoch 93, cost = 0.048953, acc = 99.13%Epoch 94, cost = 0.045235, acc = 99.12%Epoch 95, cost = 0.045136, acc = 99.14%Epoch 96, cost = 0.048240, acc = 99.02%Epoch 97, cost = 0.049063, acc = 99.21%Epoch 98, cost = 0.045373, acc = 99.23%Epoch 99, cost = 0.046127, acc = 99.12%Epoch 100, cost = 0.046864, acc = 99.10%
可以看出最后相同的数据分类,准确率比多层感知机要高(99.10% > 98.59%)。
3、LSTMNet
LSTMNet是使用长短时记忆网络(Long Short-Term Memory, LSTM)构建的神经网络,核心思想是引入了一个名为"记忆单元"的结构,该结构可以在一定程度上保留长期依赖信息,LSTM中的每个单元包括一个输入门(input gate)、一个遗忘门(forget gate)和一个输出门(output gate),这些门的作用是控制信息在记忆单元中的流动,以便网络可以学习何时存储、更新或输出有用的信息。
import numpy as npimport torchfrom torch import optim, nnfrom data_util import load_mnistclass LSTMNet(torch.nn.Module):def __init__(self, input_dim, hidden_dim, output_dim):super(LSTMNet, self).__init__()self.hidden_dim = hidden_dimself.lstm = nn.LSTM(input_dim, hidden_dim)self.linear = nn.Linear(hidden_dim, output_dim, bias=False)def forward(self, x):batch_size = x.size()[1]h0 = torch.zeros([1, batch_size, self.hidden_dim])c0 = torch.zeros([1, batch_size, self.hidden_dim])fx, _ = self.lstm.forward(x, (h0, c0))return self.linear.forward(fx[-1])def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)train_size = len(trY)n_classes = 10seq_length = 28input_dim = 28hidden_dim = 128batch_size = 100epochs = 100trX = trX.reshape(-1, seq_length, input_dim)teX = teX.reshape(-1, seq_length, input_dim)trX = np.swapaxes(trX, 0, 1)teX = np.swapaxes(teX, 0, 1)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)model = LSTMNet(input_dim, hidden_dim, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)for i in range(epochs):cost = 0.num_batches = train_size // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[:, start:end, :], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%" %(i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上这段代码通用的部分就不解释了,具体说LSTMNet类:
- self.lstm = nn.LSTM(input_dim, hidden_dim)创建一个LSTM层,输入维度为input_dim,隐藏层维度为hidden_dim;
- self.linear = nn.Linear(hidden_dim, output_dim, bias=False)创建一个线性层(全连接层),输入维度为hidden_dim,输出维度为output_dim,并设置不使用偏置项(bias);
- h0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的隐藏状态h0,全零张量,形状为[1, batch_size, hidden_dim];
- c0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的细胞状态c0,全零张量,形状为[1, batch_size, hidden_dim];
- fx, _ = self.lstm.forward(x, (h0, c0))将输入数据x以及初始隐藏状态h0和细胞状态c0传入LSTM层,得到LSTM层的输出fx;
- return self.linear.forward(fx[-1])将LSTM层的输出传入线性层进行计算,得到最终输出。这里fx[-1]表示取LSTM层输出的最后一个时间步的数据;
(2)print("第%d轮,损失值=%f,准确率=%.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))。打印出当前训练轮次的信息,其中包括损失值和准确率,以上代码的输出结果如下:
Epoch 91, cost = 0.000468, acc = 98.57%Epoch 92, cost = 0.000452, acc = 98.57%Epoch 93, cost = 0.000437, acc = 98.58%Epoch 94, cost = 0.000422, acc = 98.57%Epoch 95, cost = 0.000409, acc = 98.58%Epoch 96, cost = 0.000396, acc = 98.58%Epoch 97, cost = 0.000384, acc = 98.57%Epoch 98, cost = 0.000372, acc = 98.56%Epoch 99, cost = 0.000360, acc = 98.55%Epoch 100, cost = 0.000349, acc = 98.55%
4、辅助代码
两篇文章的from data_util import load_mnist的data_util.py代码如下:
import gzip
import os
import urllib.request as request
from os import path
import numpy as np
DATASET_DIR = 'datasets/'
MNIST_FILES = ["train-images-idx3-ubyte.gz", "train-labels-idx1-ubyte.gz", "t10k-images-idx3-ubyte.gz", "t10k-labels-idx1-ubyte.gz"]
def download_file(url, local_path):
dir_path = path.dirname(local_path)
if not path.exists(dir_path):
print("创建目录'%s' ..." % dir_path)
os.makedirs(dir_path)
print("从'%s'下载中 ..." % url)
request.urlretrieve(url, local_path)
def download_mnist(local_path):
url_root = "http://yann.lecun.com/exdb/mnist/"
for f_name in MNIST_FILES:
f_path = os.path.join(local_path, f_name)
if not path.exists(f_path):
download_file(url_root + f_name, f_path)
def one_hot(x, n):
if type(x) == list:
x = np.array(x)
x = x.flatten()
o_h = np.zeros((len(x), n))
o_h[np.arange(len(x)), x] = 1
return o_h
def load_mnist(ntrain=60000, ntest=10000, notallow=True):
data_dir = os.path.join(DATASET_DIR, 'mnist/')
if not path.exists(data_dir):
download_mnist(data_dir)
else:
# 检查所有文件
checks = [path.exists(os.path.join(data_dir, f)) for f in MNIST_FILES]
if not np.all(checks):
download_mnist(data_dir)
with gzip.open(os.path.join(data_dir, 'train-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trX = loaded[16:].reshape((60000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 'train-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trY = loaded[8:].reshape((60000))
with gzip.open(os.path.join(data_dir, 't10k-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teX = loaded[16:].reshape((10000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 't10k-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teY = loaded[8:].reshape((10000))
trX /= 255.
teX /= 255.
trX = trX[:ntrain]
trY = trY[:ntrain]
teX = teX[:ntest]
teY = teY[:ntest]
if onehot:
trY = one_hot(trY, 10)
teY = one_hot(teY, 10)
else:
trY = np.asarray(trY)
teY = np.asarray(teY)
return trX, teX, trY, teYCe qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 15 outils d'annotation d'images gratuits open source recommandés
Mar 28, 2024 pm 01:21 PM
15 outils d'annotation d'images gratuits open source recommandés
Mar 28, 2024 pm 01:21 PM
L'annotation d'images est le processus consistant à associer des étiquettes ou des informations descriptives à des images pour donner une signification et une explication plus profondes au contenu de l'image. Ce processus est essentiel à l’apprentissage automatique, qui permet d’entraîner les modèles de vision à identifier plus précisément les éléments individuels des images. En ajoutant des annotations aux images, l'ordinateur peut comprendre la sémantique et le contexte derrière les images, améliorant ainsi la capacité de comprendre et d'analyser le contenu de l'image. L'annotation d'images a un large éventail d'applications, couvrant de nombreux domaines, tels que la vision par ordinateur, le traitement du langage naturel et les modèles de vision graphique. Elle a un large éventail d'applications, telles que l'assistance aux véhicules pour identifier les obstacles sur la route, en aidant à la détection. et le diagnostic des maladies grâce à la reconnaissance d'images médicales. Cet article recommande principalement de meilleurs outils d'annotation d'images open source et gratuits. 1.Makesens
 Cet article vous amènera à comprendre SHAP : explication du modèle pour l'apprentissage automatique
Jun 01, 2024 am 10:58 AM
Cet article vous amènera à comprendre SHAP : explication du modèle pour l'apprentissage automatique
Jun 01, 2024 am 10:58 AM
Dans les domaines de l’apprentissage automatique et de la science des données, l’interprétabilité des modèles a toujours été au centre des préoccupations des chercheurs et des praticiens. Avec l'application généralisée de modèles complexes tels que l'apprentissage profond et les méthodes d'ensemble, la compréhension du processus décisionnel du modèle est devenue particulièrement importante. Explainable AI|XAI contribue à renforcer la confiance dans les modèles d'apprentissage automatique en augmentant la transparence du modèle. L'amélioration de la transparence des modèles peut être obtenue grâce à des méthodes telles que l'utilisation généralisée de plusieurs modèles complexes, ainsi que les processus décisionnels utilisés pour expliquer les modèles. Ces méthodes incluent l'analyse de l'importance des caractéristiques, l'estimation de l'intervalle de prédiction du modèle, les algorithmes d'interprétabilité locale, etc. L'analyse de l'importance des fonctionnalités peut expliquer le processus de prise de décision du modèle en évaluant le degré d'influence du modèle sur les fonctionnalités d'entrée. Estimation de l’intervalle de prédiction du modèle
 Transparent! Une analyse approfondie des principes des principaux modèles de machine learning !
Apr 12, 2024 pm 05:55 PM
Transparent! Une analyse approfondie des principes des principaux modèles de machine learning !
Apr 12, 2024 pm 05:55 PM
En termes simples, un modèle d’apprentissage automatique est une fonction mathématique qui mappe les données d’entrée à une sortie prédite. Plus précisément, un modèle d'apprentissage automatique est une fonction mathématique qui ajuste les paramètres du modèle en apprenant à partir des données d'entraînement afin de minimiser l'erreur entre la sortie prédite et la véritable étiquette. Il existe de nombreux modèles dans l'apprentissage automatique, tels que les modèles de régression logistique, les modèles d'arbre de décision, les modèles de machines à vecteurs de support, etc. Chaque modèle a ses types de données et ses types de problèmes applicables. Dans le même temps, il existe de nombreux points communs entre les différents modèles, ou il existe une voie cachée pour l’évolution du modèle. En prenant comme exemple le perceptron connexionniste, en augmentant le nombre de couches cachées du perceptron, nous pouvons le transformer en un réseau neuronal profond. Si une fonction noyau est ajoutée au perceptron, elle peut être convertie en SVM. celui-ci
 Identifier le surapprentissage et le sous-apprentissage grâce à des courbes d'apprentissage
Apr 29, 2024 pm 06:50 PM
Identifier le surapprentissage et le sous-apprentissage grâce à des courbes d'apprentissage
Apr 29, 2024 pm 06:50 PM
Cet article présentera comment identifier efficacement le surajustement et le sous-apprentissage dans les modèles d'apprentissage automatique grâce à des courbes d'apprentissage. Sous-ajustement et surajustement 1. Surajustement Si un modèle est surentraîné sur les données de sorte qu'il en tire du bruit, alors on dit que le modèle est en surajustement. Un modèle surajusté apprend chaque exemple si parfaitement qu'il classera mal un exemple inédit/inédit. Pour un modèle surajusté, nous obtiendrons un score d'ensemble d'entraînement parfait/presque parfait et un score d'ensemble/test de validation épouvantable. Légèrement modifié : "Cause du surajustement : utilisez un modèle complexe pour résoudre un problème simple et extraire le bruit des données. Parce qu'un petit ensemble de données en tant qu'ensemble d'entraînement peut ne pas représenter la représentation correcte de toutes les données."
 L'évolution de l'intelligence artificielle dans l'exploration spatiale et l'ingénierie des établissements humains
Apr 29, 2024 pm 03:25 PM
L'évolution de l'intelligence artificielle dans l'exploration spatiale et l'ingénierie des établissements humains
Apr 29, 2024 pm 03:25 PM
Dans les années 1950, l’intelligence artificielle (IA) est née. C’est à ce moment-là que les chercheurs ont découvert que les machines pouvaient effectuer des tâches similaires à celles des humains, comme penser. Plus tard, dans les années 1960, le Département américain de la Défense a financé l’intelligence artificielle et créé des laboratoires pour poursuivre son développement. Les chercheurs trouvent des applications à l’intelligence artificielle dans de nombreux domaines, comme l’exploration spatiale et la survie dans des environnements extrêmes. L'exploration spatiale est l'étude de l'univers, qui couvre l'ensemble de l'univers au-delà de la terre. L’espace est classé comme environnement extrême car ses conditions sont différentes de celles de la Terre. Pour survivre dans l’espace, de nombreux facteurs doivent être pris en compte et des précautions doivent être prises. Les scientifiques et les chercheurs pensent qu'explorer l'espace et comprendre l'état actuel de tout peut aider à comprendre le fonctionnement de l'univers et à se préparer à d'éventuelles crises environnementales.
 Implémentation d'algorithmes d'apprentissage automatique en C++ : défis et solutions courants
Jun 03, 2024 pm 01:25 PM
Implémentation d'algorithmes d'apprentissage automatique en C++ : défis et solutions courants
Jun 03, 2024 pm 01:25 PM
Les défis courants rencontrés par les algorithmes d'apprentissage automatique en C++ incluent la gestion de la mémoire, le multithread, l'optimisation des performances et la maintenabilité. Les solutions incluent l'utilisation de pointeurs intelligents, de bibliothèques de threads modernes, d'instructions SIMD et de bibliothèques tierces, ainsi que le respect des directives de style de codage et l'utilisation d'outils d'automatisation. Des cas pratiques montrent comment utiliser la bibliothèque Eigen pour implémenter des algorithmes de régression linéaire, gérer efficacement la mémoire et utiliser des opérations matricielles hautes performances.
 IA explicable : Expliquer les modèles IA/ML complexes
Jun 03, 2024 pm 10:08 PM
IA explicable : Expliquer les modèles IA/ML complexes
Jun 03, 2024 pm 10:08 PM
Traducteur | Revu par Li Rui | Chonglou Les modèles d'intelligence artificielle (IA) et d'apprentissage automatique (ML) deviennent aujourd'hui de plus en plus complexes, et le résultat produit par ces modèles est une boîte noire – impossible à expliquer aux parties prenantes. L'IA explicable (XAI) vise à résoudre ce problème en permettant aux parties prenantes de comprendre comment fonctionnent ces modèles, en s'assurant qu'elles comprennent comment ces modèles prennent réellement des décisions et en garantissant la transparence des systèmes d'IA, la confiance et la responsabilité pour résoudre ce problème. Cet article explore diverses techniques d'intelligence artificielle explicable (XAI) pour illustrer leurs principes sous-jacents. Plusieurs raisons pour lesquelles l’IA explicable est cruciale Confiance et transparence : pour que les systèmes d’IA soient largement acceptés et fiables, les utilisateurs doivent comprendre comment les décisions sont prises
 Cinq écoles d'apprentissage automatique que vous ne connaissez pas
Jun 05, 2024 pm 08:51 PM
Cinq écoles d'apprentissage automatique que vous ne connaissez pas
Jun 05, 2024 pm 08:51 PM
L'apprentissage automatique est une branche importante de l'intelligence artificielle qui donne aux ordinateurs la possibilité d'apprendre à partir de données et d'améliorer leurs capacités sans être explicitement programmés. L'apprentissage automatique a un large éventail d'applications dans divers domaines, de la reconnaissance d'images et du traitement du langage naturel aux systèmes de recommandation et à la détection des fraudes, et il change notre façon de vivre. Il existe de nombreuses méthodes et théories différentes dans le domaine de l'apprentissage automatique, parmi lesquelles les cinq méthodes les plus influentes sont appelées les « Cinq écoles d'apprentissage automatique ». Les cinq grandes écoles sont l’école symbolique, l’école connexionniste, l’école évolutionniste, l’école bayésienne et l’école analogique. 1. Le symbolisme, également connu sous le nom de symbolisme, met l'accent sur l'utilisation de symboles pour le raisonnement logique et l'expression des connaissances. Cette école de pensée estime que l'apprentissage est un processus de déduction inversée, à travers les connaissances existantes.
