
 Périphériques technologiques
IA
L'équipe chinoise a remporté les prix du meilleur article et du meilleur article système, et les résultats de la recherche CoRL ont été annoncés.
Périphériques technologiques
IA
L'équipe chinoise a remporté les prix du meilleur article et du meilleur article système, et les résultats de la recherche CoRL ont été annoncés.
L'équipe chinoise a remporté les prix du meilleur article et du meilleur article système, et les résultats de la recherche CoRL ont été annoncés.

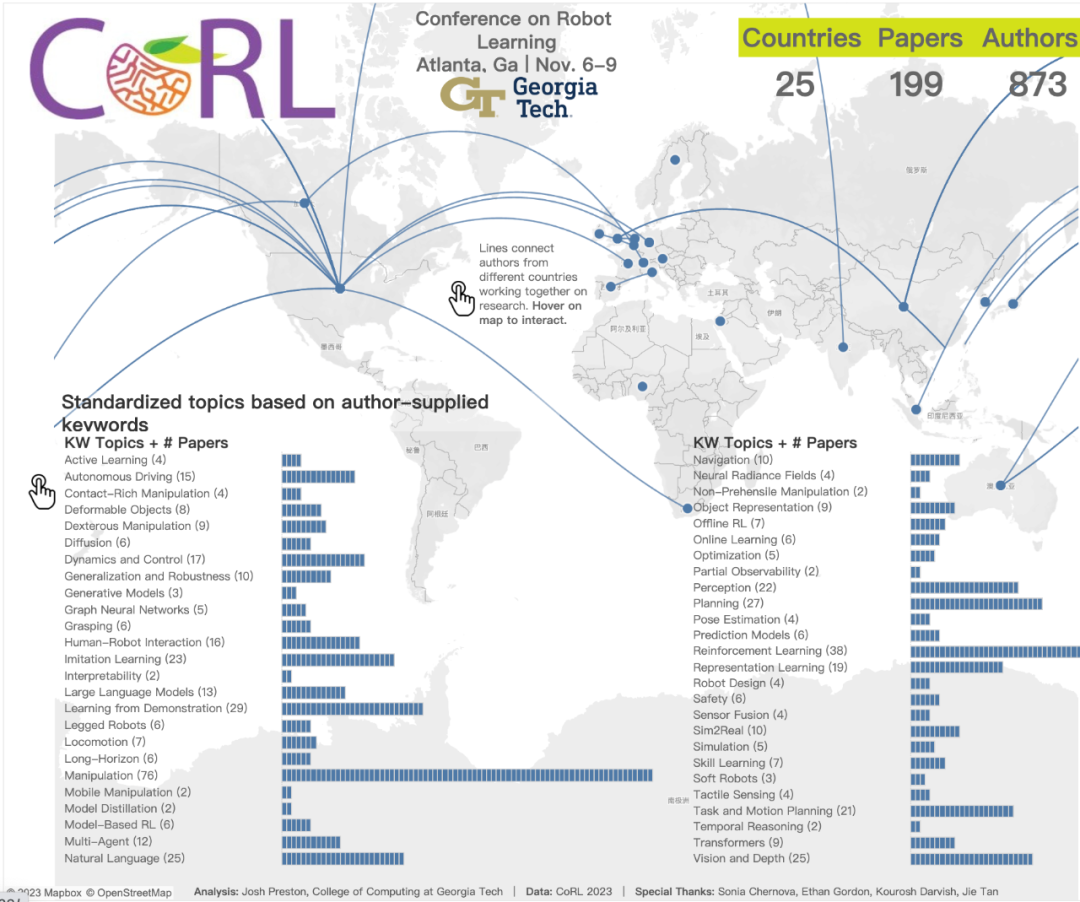
Depuis sa première tenue en 2017, CoRL est devenue l'une des conférences universitaires les plus importantes au monde à l'intersection de la robotique et de l'apprentissage automatique. CoRL est une conférence à thème unique pour la recherche sur l'apprentissage des robots, couvrant plusieurs sujets tels que la robotique, l'apprentissage automatique et le contrôle, y compris la théorie et l'application
La conférence CoRL 2023 se tiendra à Atlanta, aux États-Unis, du 6 au 9 novembre. Selon les données officielles, 199 articles provenant de 25 pays ont été sélectionnés pour CoRL cette année. Les sujets populaires incluent les opérations, l’apprentissage par renforcement, etc. Bien que CoRL soit à plus petite échelle que les grandes conférences universitaires sur l'IA telles que l'AAAI et le CVPR, à mesure que la popularité de concepts tels que les grands modèles, l'intelligence incarnée et les robots humanoïdes augmente cette année, des recherches pertinentes dignes d'attention seront également présentées à la conférence CoRL.
Actuellement, CoRL 2023 a officiellement annoncé le prix du meilleur article, le prix du meilleur article étudiant, le prix du meilleur article système et d'autres récompenses. Nous vous présenterons ensuite ces articles primés. "Meilleur article" Isola
Institution : MIT CSAIL, IAIFI
 Adresse papier :
Adresse papier :
- Aperçu de la recherche : Actuellement, l'auto-supervision dans les modèles d'image Apprentissage et l'apprentissage supervisé des langues ont intégré de riches connaissances mondiales, essentielles à la capacité de généralisation du modèle. Cependant, les caractéristiques des images ne contiennent que des informations bidimensionnelles. Nous avons appris que dans les tâches robotiques, il est très important de comprendre la géométrie des objets tridimensionnels du monde réel
- En utilisant le Distilled Feature Field (DFF), cette recherche combine une géométrie tridimensionnelle précise combinée avec le sémantique riche du modèle de base 2D pour permettre au robot d'exploiter les riches a priori visuels et linguistiques du modèle de base 2D pour effectuer des opérations guidées par le langage
- Plus précisément, cette recherche Une méthode d'apprentissage en quelques coups pour 6- La saisie et le placement du DOF sont proposés et se généralisent aux objets invisibles en utilisant des priorités spatiales et sémantiques fortes. En utilisant des fonctionnalités extraites du modèle de langage visuel CLIP, cette étude propose une instruction ouverte en langage naturel pour opérer sur de nouveaux objets et démontre la capacité de la méthode à se généraliser à des expressions invisibles et à de nouveaux objets.
Les deux co-auteurs de cet article sont William Shen et Yang Ge, membres de l'équipe CSAIL « Embodied Intelligence » Yang Ge est le co-organisateur du CSAIL Embodied Intelligence Symposium 2023.
J'ai appris que "Heart of the Machine" a présenté cette recherche en détail, veuillez consulter "Quelle est la puissance des robots pris en charge par de grands modèles ? Le MIT CSAIL&IAIFI utilise le langage naturel pour guider les robots dans la saisie des objets"
Meilleur étudiant Article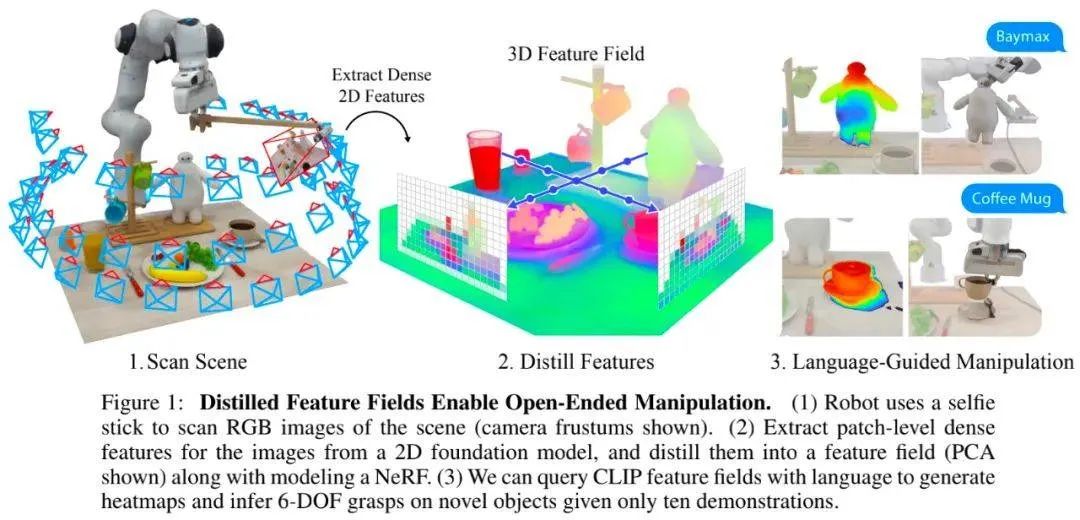
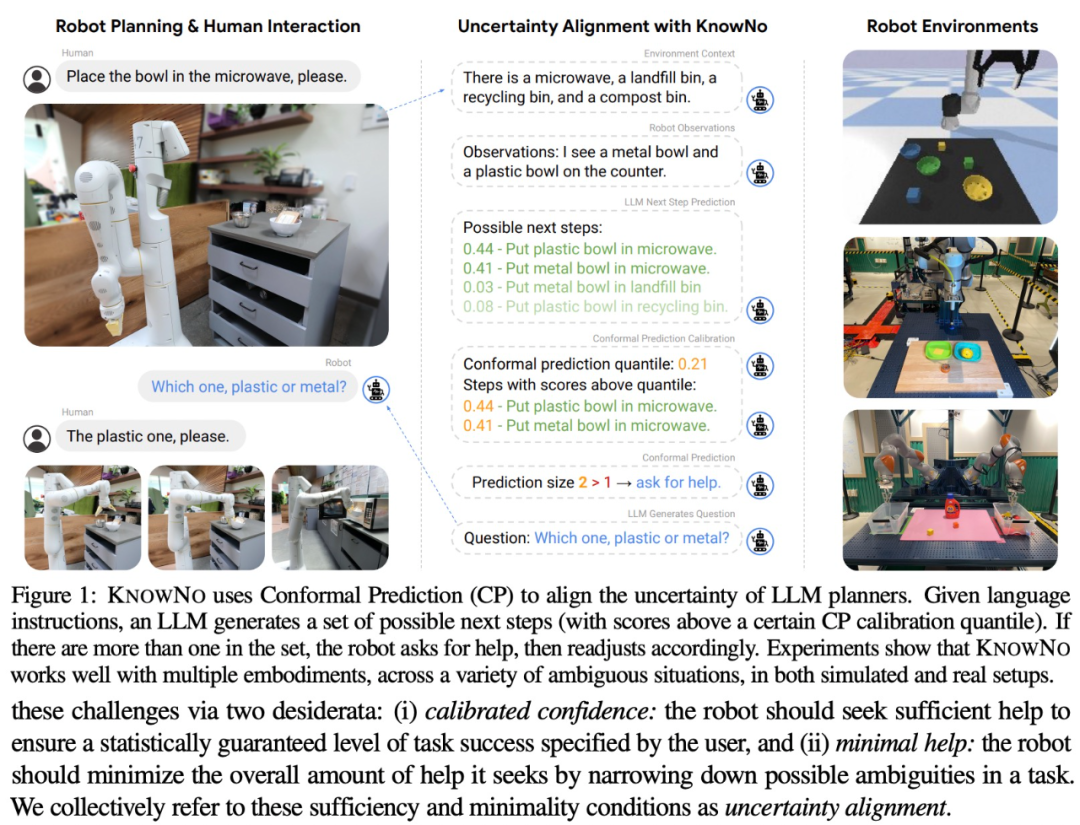
Article : Des robots qui demandent de l'aide : alignement d'incertitudes pour les planificateurs de grands modèles de langage
Auteur : Allen Z. Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, Zhenjia Xu, Dorsa Sadigh, Andy Zeng, Anirudha Majumdar
Institution : Princeton University, Google DeepMind
Adresse papier :
https://openreview.net/forum?id =4ZK8ODNyFXx- Le grand modèle de langage (LLM) est une technologie avec de larges perspectives d'application, notamment dans le domaine de la robotique. Cependant, bien que le LLM montre un grand potentiel dans la planification étape par étape et le raisonnement de bon sens, il souffre également de certains problèmes d'illusion.
- Sur cette base, cette étude propose un nouveau cadre - KnowNo, pour la métrique et l'alignement basé sur l'incertitude. dans les planificateurs LLM. Cela permet au LLM de se rendre compte quelles informations sont inconnues et de demander de l'aide en cas de besoin.

KnowNo est basé sur la théorie de la prédiction conforme, qui fournit des garanties statistiques de l'achèvement des tâches et est capable de minimiser l'intervention humaine dans les tâches de planification en plusieurs étapes
La recherche a été menée sur divers robots simulés et réels. l'expérience KnowNo a été testée avec différents modes de tâches d'incertitude (y compris l'incertitude spatiale, l'incertitude numérique, etc.). Les résultats expérimentaux montrent que KnowNo fonctionne bien en termes d'amélioration de l'efficacité et de l'autonomie, surpasse les références et est sûr et digne de confiance. KnowNo peut être utilisé directement dans LLM sans réglage fin du modèle, fournissant une solution légère et efficace pour modéliser l'incertitude et complétant les capacités croissantes du modèle sous-jacent. "Meilleur article système"
Institution : Université de Stanford, UIUC
https://openreview.net/forum?id=69y5fzvaATAdresse papier :- Introduction papier : Les humains sont doués pour créer et utiliser divers outils, Mais pour les robots, comprendre comment utiliser efficacement les outils et effectuer des opérations sur les objets correspondants reste un défi de taille. Cette recherche a construit un système robot intelligent nommé RoboCook, qui peut détecter, modéliser et manipuler des objets élasto-plastiques grâce à divers outils
- RoboCook utilise la représentation de scènes de nuages de points, en utilisant des réseaux neuronaux Graph (GNN) pour modéliser les interactions outil-objet. et combinez la classification des outils avec un apprentissage politique auto-supervisé pour élaborer des plans d'action.
- Cette étude montre qu'avec seulement 20 minutes de données d'interaction réelles pour chaque outil, RoboCook peut apprendre et manipuler le bras robotique pour accomplir certaines tâches complexes et à long terme de manipulation d'objets élastiques-plastiques, telles que faire des boulettes, Biscuits alphabétiques, etc.
Selon les résultats expérimentaux, les performances de RoboCook sont nettement meilleures que la méthode SOTA existante, et il peut toujours faire preuve de stabilité face à de graves interférences externes, et son adaptabilité à différents matériaux est également meilleure
Cela vaut la peine mentionnant que les co-auteurs de cet article sont Haochen Shi, doctorant de l'Université de Stanford, et Huazhe Xu, ancien chercheur postdoctoral à l'Université de Stanford et maintenant professeur adjoint à l'Institut des sciences de l'information interdisciplinaires de l'Université Tsinghua. Les auteurs de l'article sont Wu Jiajun, ancien élève de Yao Ban, professeur adjoint à l'Université de Stanford.
La liste restreinte des articles gagnants a été annoncée
 Adresse papier :
Adresse papier :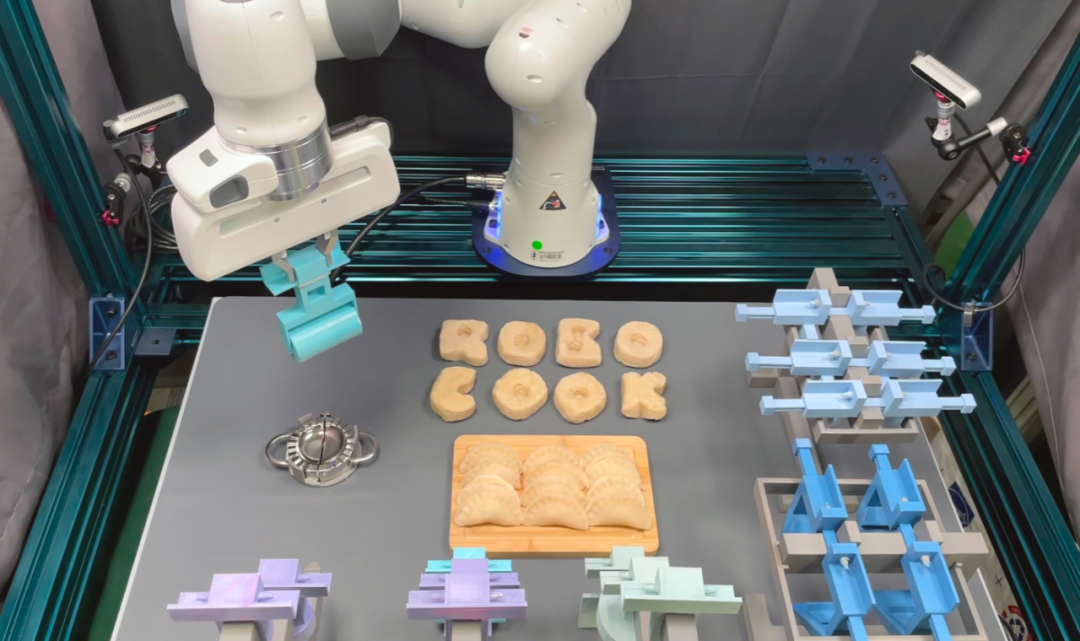
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment configurer le format de journal debian Apache
Apr 12, 2025 pm 11:30 PM
Comment configurer le format de journal debian Apache
Apr 12, 2025 pm 11:30 PM
Cet article décrit comment personnaliser le format de journal d'Apache sur les systèmes Debian. Les étapes suivantes vous guideront à travers le processus de configuration: Étape 1: Accédez au fichier de configuration Apache Le fichier de configuration apache principal du système Debian est généralement situé dans /etc/apache2/apache2.conf ou /etc/apache2/httpd.conf. Ouvrez le fichier de configuration avec les autorisations racinaires à l'aide de la commande suivante: sudonano / etc / apache2 / apache2.conf ou sudonano / etc / apache2 / httpd.conf Étape 2: définir les formats de journal personnalisés à trouver ou
 Comment les journaux Tomcat aident à dépanner les fuites de mémoire
Apr 12, 2025 pm 11:42 PM
Comment les journaux Tomcat aident à dépanner les fuites de mémoire
Apr 12, 2025 pm 11:42 PM
Les journaux TomCat sont la clé pour diagnostiquer les problèmes de fuite de mémoire. En analysant les journaux TomCat, vous pouvez avoir un aperçu de l'utilisation de la mémoire et du comportement de collecte des ordures (GC), localiser et résoudre efficacement les fuites de mémoire. Voici comment dépanner les fuites de mémoire à l'aide des journaux Tomcat: 1. Analyse des journaux GC d'abord, activez d'abord la journalisation GC détaillée. Ajoutez les options JVM suivantes aux paramètres de démarrage TomCat: -xx: printgcdetails-xx: printgcdatestamps-xloggc: gc.log Ces paramètres généreront un journal GC détaillé (GC.Log), y compris des informations telles que le type GC, la taille et le temps des objets de recyclage. Analyse GC.Log
 Comment implémenter le tri des fichiers par Debian Readdir
Apr 13, 2025 am 09:06 AM
Comment implémenter le tri des fichiers par Debian Readdir
Apr 13, 2025 am 09:06 AM
Dans Debian Systems, la fonction ReadDir est utilisée pour lire le contenu du répertoire, mais l'ordre dans lequel il revient n'est pas prédéfini. Pour trier les fichiers dans un répertoire, vous devez d'abord lire tous les fichiers, puis les trier à l'aide de la fonction QSORT. Le code suivant montre comment trier les fichiers de répertoire à l'aide de ReadDir et QSort dans Debian System: # include # include # include # include # include // Fonction de comparaison personnalisée, utilisée pour qsortintCompare (constvoid * a, constvoid * b) {returnstrcmp (* (
 Comment optimiser les performances de Debian Readdir
Apr 13, 2025 am 08:48 AM
Comment optimiser les performances de Debian Readdir
Apr 13, 2025 am 08:48 AM
Dans Debian Systems, les appels du système ReadDir sont utilisés pour lire le contenu des répertoires. Si ses performances ne sont pas bonnes, essayez la stratégie d'optimisation suivante: simplifiez le nombre de fichiers d'annuaire: divisez les grands répertoires en plusieurs petits répertoires autant que possible, en réduisant le nombre d'éléments traités par appel ReadDir. Activer la mise en cache de contenu du répertoire: construire un mécanisme de cache, mettre à jour le cache régulièrement ou lorsque le contenu du répertoire change et réduire les appels fréquents à Readdir. Les caches de mémoire (telles que Memcached ou Redis) ou les caches locales (telles que les fichiers ou les bases de données) peuvent être prises en compte. Adoptez une structure de données efficace: si vous implémentez vous-même la traversée du répertoire, sélectionnez des structures de données plus efficaces (telles que les tables de hachage au lieu de la recherche linéaire) pour stocker et accéder aux informations du répertoire
 Comment configurer les règles de pare-feu pour Debian Syslog
Apr 13, 2025 am 06:51 AM
Comment configurer les règles de pare-feu pour Debian Syslog
Apr 13, 2025 am 06:51 AM
Cet article décrit comment configurer les règles de pare-feu à l'aide d'iptables ou UFW dans Debian Systems et d'utiliser Syslog pour enregistrer les activités de pare-feu. Méthode 1: Utiliser iptableIpTable est un puissant outil de pare-feu de ligne de commande dans Debian System. Afficher les règles existantes: utilisez la commande suivante pour afficher les règles iptables actuelles: Sudoiptables-L-N-V permet un accès IP spécifique: Par exemple, permettez l'adresse IP 192.168.1.100 pour accéder au port 80: Sudoiptables-Ainput-PTCP - DPORT80-S192.16
 Comment apprendre Debian Syslog
Apr 13, 2025 am 11:51 AM
Comment apprendre Debian Syslog
Apr 13, 2025 am 11:51 AM
Ce guide vous guidera pour apprendre à utiliser Syslog dans Debian Systems. Syslog est un service clé dans les systèmes Linux pour les messages du système de journalisation et du journal d'application. Il aide les administrateurs à surveiller et à analyser l'activité du système pour identifier et résoudre rapidement les problèmes. 1. Connaissance de base de Syslog Les fonctions principales de Syslog comprennent: la collecte et la gestion des messages journaux de manière centralisée; Prise en charge de plusieurs formats de sortie de journal et des emplacements cibles (tels que les fichiers ou les réseaux); Fournir des fonctions de visualisation et de filtrage des journaux en temps réel. 2. Installer et configurer syslog (en utilisant RSYSLOG) Le système Debian utilise RSYSLOG par défaut. Vous pouvez l'installer avec la commande suivante: SudoaptupDatesud
 Où est le chemin de journal debian nginx
Apr 12, 2025 pm 11:33 PM
Où est le chemin de journal debian nginx
Apr 12, 2025 pm 11:33 PM
Dans le système Debian, les emplacements de stockage par défaut du journal d'accès et du journal d'erreur de Nginx sont les suivants: Log d'accès (AccessLog): / var / log / nginx / access.log error log (errorLog): / var / log / nginx / error.log Le chemin ci-dessus est la configuration par défaut de l'installation standard de DebianNginx. Si vous avez modifié l'emplacement de stockage du fichier journal pendant le processus d'installation, veuillez vérifier votre fichier de configuration Nginx (généralement situé dans /etc/nginx/nginx.conf ou / etc / nginx / sites-louable / répertoire). Dans le fichier de configuration
 Conseils de configuration du pare-feu Debian Mail Server
Apr 13, 2025 am 11:42 AM
Conseils de configuration du pare-feu Debian Mail Server
Apr 13, 2025 am 11:42 AM
La configuration du pare-feu d'un serveur de courrier Debian est une étape importante pour assurer la sécurité du serveur. Voici plusieurs méthodes de configuration de pare-feu couramment utilisées, y compris l'utilisation d'iptables et de pare-feu. Utilisez les iptables pour configurer le pare-feu pour installer iptables (sinon déjà installé): Sudoapt-getUpDaSuDoapt-getinstalliptableView Règles actuelles iptables: Sudoiptable-L Configuration
