

Nouvelle idée de détection Range View3D : RangePerception

Titre réécrit : Range Awareness : Taming LiDAR Range View for Efficient and Accurate 3D Object Detection
Veuillez cliquer sur le lien suivant pour consulter l'article : https://openreview.net/pdf?id=9kFQEJSyCM
Affiliation de l'auteur : Shanghai Artificial Laboratoire de renseignement Université de Fudan Après réécriture : Unité : Laboratoire d'Intelligence Artificielle de Shanghai, Université de Fudan
Idée de thèse :
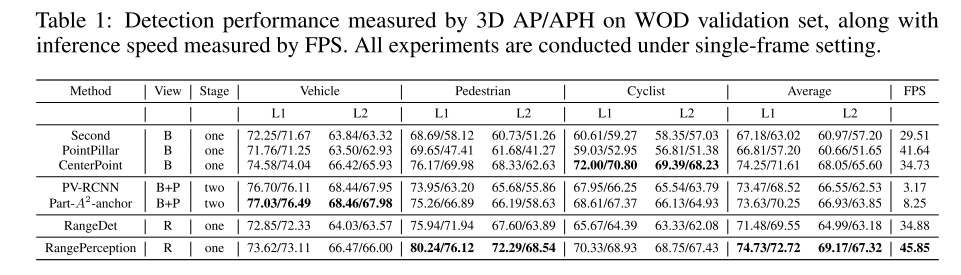
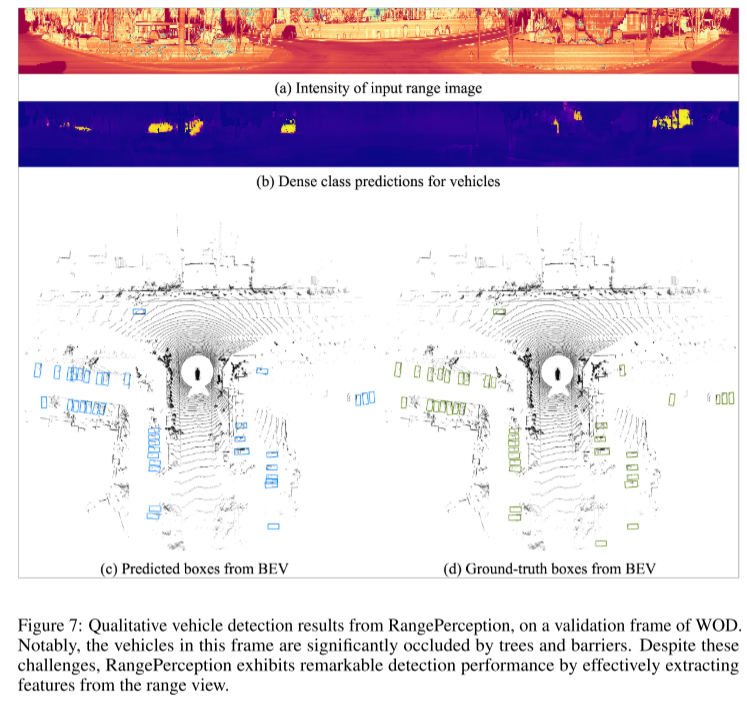
Actuellement, les méthodes de détection 3D basées sur LiDAR utilisent principalement la vue à vol d'oiseau (BEV) ou la vue à distance (RV) comme base . Les méthodes BEV reposent sur la voxélisation et la convolution 3D, ce qui entraîne des processus de formation et d'inférence moins efficaces. En revanche, la méthode RV présente une efficacité plus élevée en raison de sa compacité et de sa compatibilité avec les convolutions 2D, mais ses performances sont encore en retard par rapport à la méthode BEV. Pour éliminer l'écart de performances tout en maintenant l'efficacité de la méthode RV, cette étude propose un cadre de détection d'objets 3D efficace et précis basé sur RV appelé RangePerception. Grâce à une analyse minutieuse, cette étude identifie deux défis clés qui entravent les performances des méthodes RV existantes : 1) Il existe un écart de domaine naturel entre les coordonnées du monde 3D utilisées dans la sortie et les coordonnées de l'image de plage 2D utilisées dans l'entrée, ce qui conduit à un changement de distance Il devient difficile d'extraire des informations à partir des images ; 2) L'image de distance d'origine présente des problèmes de dommages visuels, ce qui affecte la précision de détection des cibles situées au bord de l'image de distance. Pour relever ces défis, cet article propose deux nouveaux algorithmes nommés Range Aware Kernel (RAK) et Vision Restoration Module (VRM), qui facilitent le flux d'informations sur la représentation des images de distance et les résultats de détection 3D des coordonnées mondiales. Avec l'aide de RAK et VRM, RangePerception améliore l'AP L1/L2 moyen de 3,25/4,18 par rapport à la précédente méthode RV de pointe RangeDet sur Waymo Open Dataset. RangePerception est la première méthode de détection 3D basée sur RV Par rapport à la célèbre méthode CenterPoint basée sur BEV, son AP moyen est légèrement plus élevé et la vitesse d'inférence est 1,3 fois celle de CenterPoint. démontre un cadre de détection 3D efficace et précis basé sur RV appelé RangePerception. Pour surmonter les principaux défis ci-dessus, deux nouveaux algorithmes nommés Range Aware Kernel (RAK) et Vision Restoration Module (VRM) sont proposés et intégrés dans le cadre RangePerception, qui facilitent tous deux la représentation des images de distance et le flux d'informations 3D de coordination mondiale des résultats des tests. Avec l'aide de RAK et VRM, notre RangePerception atteint des performances de pointe en tant que méthode de détection 3D basée sur une vue de portée en fournissant 73,62, 80,24 et 70,33 L1 3D AP sur WOD pour les véhicules, les piétons et les cyclistes. Les contributions de cet article sont les suivantes.
RangePerception Framework. Cet article présente un nouveau framework de détection 3D hautes performances appelé RangePerception. RangePerception est le premier détecteur 3D basé sur RV, atteignant un AP L1/L2 moyen de 74,73/69,17 sur WOD, ce qui est meilleur que le précédent détecteur RV de pointe RangeDet, qui avait une L1/L2 moyenne. AP de 71,48/ 64,99, montrant une amélioration de 3,25/4,18. RangePerception montre également des performances légèrement supérieures par rapport à la méthode largement utilisée basée sur BEV CenterPoint [6], qui atteint un AP L1/L2 moyen de 74,25/68,04. Notamment, la vitesse d’inférence de RangePerception est 1,3 fois plus rapide que celle de CenterPoint, ce qui prouve qu’il est plus adapté au déploiement en temps réel sur des véhicules autonomes.
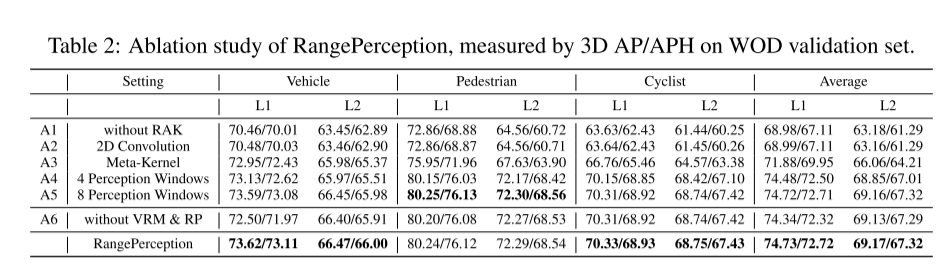
Range Aware KernelParti de l'extracteur de fonctionnalités RangePerception, le Range Aware Kernel (RAK) est un algorithme révolutionnaire conçu pour les réseaux basés sur RV. RAK décompose l'espace d'image de plage en plusieurs sous-espaces et surmonte le problème de désalignement spatial en extrayant indépendamment les caractéristiques de chaque sous-espace. Les résultats expérimentaux montrent que RAK améliore le AP L1/L2 moyen de 5,75/5,99 avec un coût de calcul négligeable.
Module de restauration de la vision.Afin de résoudre le problème de corruption de la vision (Vision Corruption issue), cette recherche propose le Module de restauration de la vision (VRM). VRM étend le champ de réception du réseau fédérateur en restaurant les zones précédemment endommagées. VRM est particulièrement utile pour la détection de véhicules, comme le montre la section expérimentale.
Figure 2 : Le framework RangePerception prend une image de plage I en entrée et génère des prédictions denses. Afin d'améliorer l'effet d'apprentissage de la représentation, le framework intègre les modules VRM et RAK en séquence avant Range Backbone. Ensuite, un élagueuse de redondance spécialement conçu est utilisé pour éliminer la redondance dans les fonctionnalités profondes, réduisant ainsi le coût de calcul du réseau de proposition de région ultérieur et des couches de post-traitement
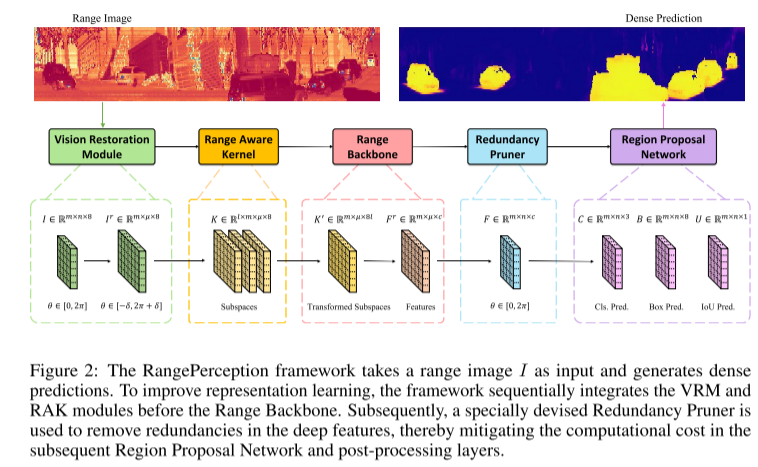
Figure 1 : (a-d) Exemples d'images du signal LiDAR supérieur, représentés respectivement par RV et BEV. (e) Phénomènes de désalignement spatial. (f) Phénomènes de corruption de la vision.
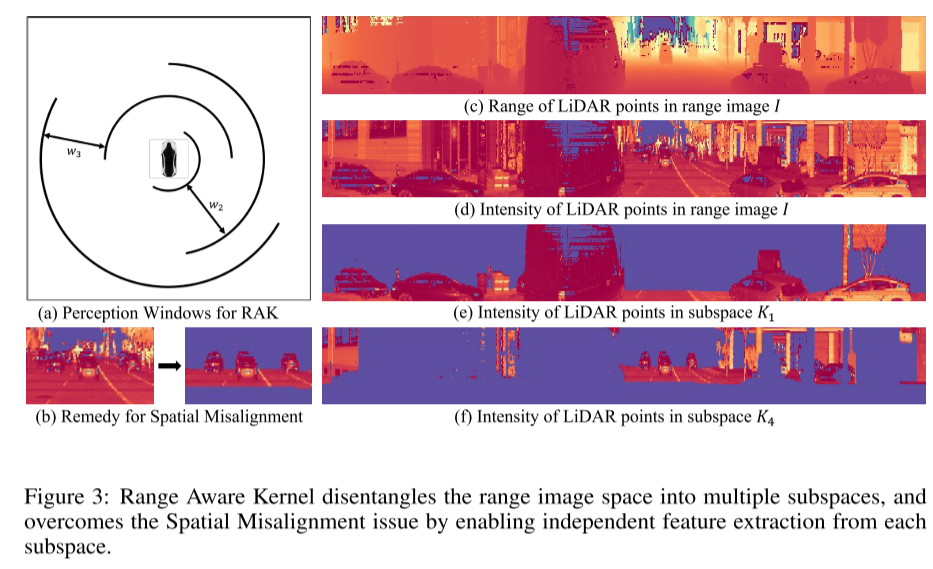
Figure 3 : Range Aware Kernel décompose l'espace d'image de plage en plusieurs sous-espaces et surmonte le problème de désalignement spatial en extrayant des caractéristiques indépendantes de chaque sous-espace.
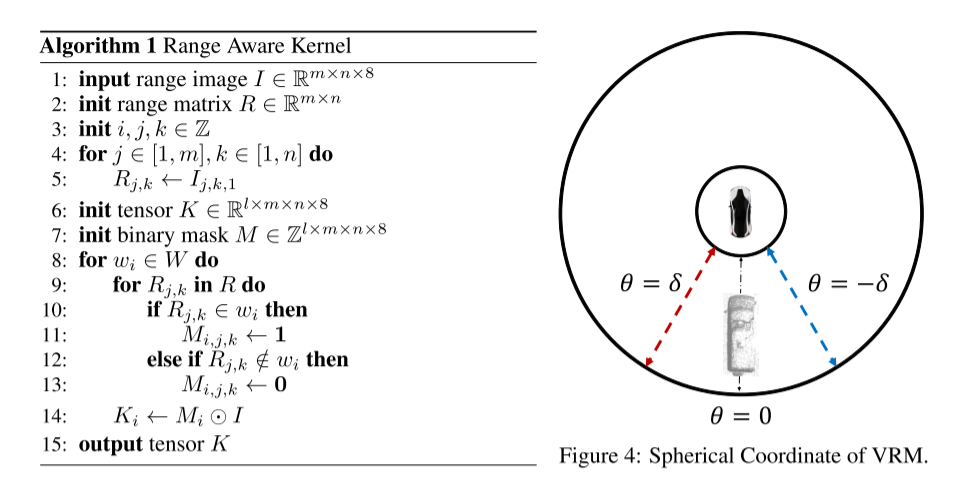
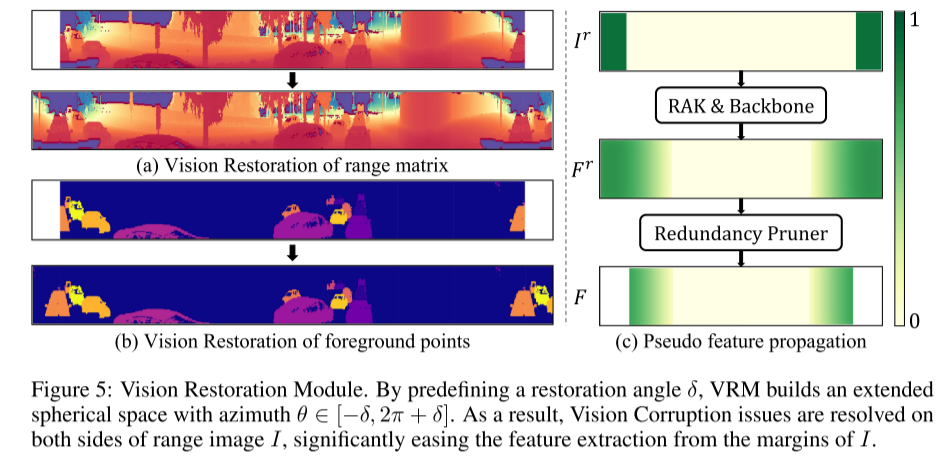
Figure 5 : Module de restauration de la vision. En prédéfinissant l'angle de récupération δ, VRM construit un espace sphérique étendu avec des angles d'azimut θ ∈ [−δ, 2π + δ]. Par conséquent, le problème de corruption visuelle des deux côtés de l’image de distance I est résolu, simplifiant considérablement le processus d’extraction de caractéristiques à partir des bords de I.
Résultats expérimentaux :
Résumé :
Cet article explique RangePerception, un cadre de détection tridimensionnelle basé sur RV qui peut résoudre efficacement les erreurs spatiales. inflammation et dommages visuels énigme. En introduisant les technologies RAK et VRM, RangePerception a démontré d'excellentes capacités de détection sur WOD, tout en démontrant également son potentiel de déploiement pratique efficace et précis
Citation :
@inproceedings{bai2023rangeperception,title={RangePerception: Taming Li{DAR} Range View for Efficient and Accurate 3D Object Detection},author={Yeqi BAI and Ben Fei and Youquan Liu and Tao MA and Yuenan Hou and Botian Shi and Yikang LI},booktitle={Thirty-seventh Conference on Neural Information Processing Systems},year={2023},url={https://openreview.net/forum?id=9kFQEJSyCM}}
Lien original : https://mp .weixin.qq .com/s/EJCl5kLxhHaa7lh98g2I6w
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment évaluer la rentabilité du support commercial des frameworks Java
Jun 05, 2024 pm 05:25 PM
Comment évaluer la rentabilité du support commercial des frameworks Java
Jun 05, 2024 pm 05:25 PM
L'évaluation du rapport coût/performance du support commercial pour un framework Java implique les étapes suivantes : Déterminer le niveau d'assurance requis et les garanties de l'accord de niveau de service (SLA). L’expérience et l’expertise de l’équipe d’appui à la recherche. Envisagez des services supplémentaires tels que les mises à niveau, le dépannage et l'optimisation des performances. Évaluez les coûts de support commercial par rapport à l’atténuation des risques et à une efficacité accrue.
 Comment la courbe d'apprentissage des frameworks PHP se compare-t-elle à celle d'autres frameworks de langage ?
Jun 06, 2024 pm 12:41 PM
Comment la courbe d'apprentissage des frameworks PHP se compare-t-elle à celle d'autres frameworks de langage ?
Jun 06, 2024 pm 12:41 PM
La courbe d'apprentissage d'un framework PHP dépend de la maîtrise du langage, de la complexité du framework, de la qualité de la documentation et du support de la communauté. La courbe d'apprentissage des frameworks PHP est plus élevée par rapport aux frameworks Python et inférieure par rapport aux frameworks Ruby. Par rapport aux frameworks Java, les frameworks PHP ont une courbe d'apprentissage modérée mais un temps de démarrage plus court.
 Comment les options légères des frameworks PHP affectent-elles les performances des applications ?
Jun 06, 2024 am 10:53 AM
Comment les options légères des frameworks PHP affectent-elles les performances des applications ?
Jun 06, 2024 am 10:53 AM
Le framework PHP léger améliore les performances des applications grâce à une petite taille et une faible consommation de ressources. Ses fonctionnalités incluent : une petite taille, un démarrage rapide, une faible utilisation de la mémoire, une vitesse de réponse et un débit améliorés et une consommation de ressources réduite. Cas pratique : SlimFramework crée une API REST, seulement 500 Ko, une réactivité élevée et un débit élevé.
 RedMagic Tablet 3D Explorer Edition propose un affichage 3D sans lunettes
Sep 06, 2024 am 06:45 AM
RedMagic Tablet 3D Explorer Edition propose un affichage 3D sans lunettes
Sep 06, 2024 am 06:45 AM
La RedMagic Tablet 3D Explorer Edition a été lancée aux côtés de la Gaming Tablet Pro. Cependant, alors que ce dernier est davantage destiné aux joueurs, le premier est davantage destiné au divertissement. La nouvelle tablette Android est dotée de ce que l'entreprise appelle une « 3D à l'oeil nu ».
 Bonnes pratiques en matière de documentation du framework Golang
Jun 04, 2024 pm 05:00 PM
Bonnes pratiques en matière de documentation du framework Golang
Jun 04, 2024 pm 05:00 PM
La rédaction d'une documentation claire et complète est cruciale pour le framework Golang. Les meilleures pratiques incluent le respect d'un style de documentation établi, tel que le Go Coding Style Guide de Google. Utilisez une structure organisationnelle claire, comprenant des titres, des sous-titres et des listes, et fournissez la navigation. Fournit des informations complètes et précises, notamment des guides de démarrage, des références API et des concepts. Utilisez des exemples de code pour illustrer les concepts et l'utilisation. Maintenez la documentation à jour, suivez les modifications et documentez les nouvelles fonctionnalités. Fournir une assistance et des ressources communautaires telles que des problèmes et des forums GitHub. Créez des exemples pratiques, tels que la documentation API.
 Comment choisir le meilleur framework Golang pour différents scénarios d'application
Jun 05, 2024 pm 04:05 PM
Comment choisir le meilleur framework Golang pour différents scénarios d'application
Jun 05, 2024 pm 04:05 PM
Choisissez le meilleur framework Go en fonction des scénarios d'application : tenez compte du type d'application, des fonctionnalités du langage, des exigences de performances et de l'écosystème. Frameworks Go courants : Gin (application Web), Echo (service Web), Fibre (haut débit), gorm (ORM), fasthttp (vitesse). Cas pratique : construction de l'API REST (Fiber) et interaction avec la base de données (gorm). Choisissez un framework : choisissez fasthttp pour les performances clés, Gin/Echo pour les applications Web flexibles et gorm pour l'interaction avec la base de données.
 Quels sont les malentendus courants dans le processus d'apprentissage du framework Golang ?
Jun 05, 2024 pm 09:59 PM
Quels sont les malentendus courants dans le processus d'apprentissage du framework Golang ?
Jun 05, 2024 pm 09:59 PM
Il existe cinq malentendus dans l'apprentissage du framework Go : une dépendance excessive à l'égard du framework et une flexibilité limitée. Si vous ne respectez pas les conventions du framework, le code sera difficile à maintenir. L'utilisation de bibliothèques obsolètes peut entraîner des problèmes de sécurité et de compatibilité. L'utilisation excessive de packages obscurcit la structure du code. Ignorer la gestion des erreurs entraîne un comportement inattendu et des plantages.
 Explication pratique détaillée du développement du framework Golang : questions et réponses
Jun 06, 2024 am 10:57 AM
Explication pratique détaillée du développement du framework Golang : questions et réponses
Jun 06, 2024 am 10:57 AM
Dans le développement du framework Go, les défis courants et leurs solutions sont les suivants : Gestion des erreurs : utilisez le package d'erreurs pour la gestion et utilisez un middleware pour gérer les erreurs de manière centralisée. Authentification et autorisation : intégrez des bibliothèques tierces et créez un middleware personnalisé pour vérifier les informations d'identification. Traitement simultané : utilisez des goroutines, des mutex et des canaux pour contrôler l'accès aux ressources. Tests unitaires : utilisez les packages, les simulations et les stubs gotest pour l'isolation, ainsi que les outils de couverture de code pour garantir la suffisance. Déploiement et surveillance : utilisez les conteneurs Docker pour regrouper les déploiements, configurer les sauvegardes de données et suivre les performances et les erreurs avec des outils de journalisation et de surveillance.
