
 Périphériques technologiques
IA
La mise à jour du brevet Microsoft révèle un moyen de faire fonctionner des casques AR/VR via des contrôleurs en anneau
Périphériques technologiques
IA
La mise à jour du brevet Microsoft révèle un moyen de faire fonctionner des casques AR/VR via des contrôleurs en anneau
La mise à jour du brevet Microsoft révèle un moyen de faire fonctionner des casques AR/VR via des contrôleurs en anneau

Selon un rapport de Yingwei.com du 28 décembre 2023, des géants de la technologie tels qu'Apple et Meta explorent diverses méthodes de saisie pour la réalité augmentée (AR) et la réalité virtuelle (VR), y compris les anneaux. Parallèlement, Microsoft mène des recherches similaires. Dans une demande de brevet intitulée « Appareil portable permettant des gestes multi-doigts », Microsoft a présenté un contrôleur en anneau qui peut être utilisé pour contrôler des terminaux associés, tels que des casques. Cette technologie devrait apporter plus d’innovation dans le domaine AR/VR.
Dans un mode de réalisation, un appareil portable tel qu'une bague comprend deux capteurs et un contrôleur. Le premier capteur est configuré pour détecter un ou plusieurs mouvements d'un premier doigt de l'utilisateur, et le deuxième capteur est configuré pour détecter un ou plusieurs mouvements d'un deuxième doigt qui est différent du premier doigt.
Le contrôleur est configuré pour déterminer le mouvement relatif entre le premier doigt et le deuxième doigt en fonction du mouvement du premier et du deuxième doigt. Ce mouvement relatif peut définir un geste multi-doigts. Le contrôleur peut ensuite contrôler un dispositif final associé, tel qu'un visiocasque, sur la base de gestes à plusieurs doigts.
Un dispositif portable 100 tel qu'une bague peut être porté au doigt de l'utilisateur. Le dispositif portable 100 est équipé d'un ensemble de capteurs pour détecter le mouvement relatif de deux doigts ou plus, tels qu'un premier doigt 201 et un deuxième doigt 202. Le dispositif portable 100 reconnaît un geste multi-doigts sur la base de ce mouvement relatif de différents doigts, puis commande le dispositif terminal associé 300 sur la base du geste multi-doigts. De cette manière, les utilisateurs peuvent contrôler et interagir avec les appareils finaux de manière plus efficace et plus flexible.
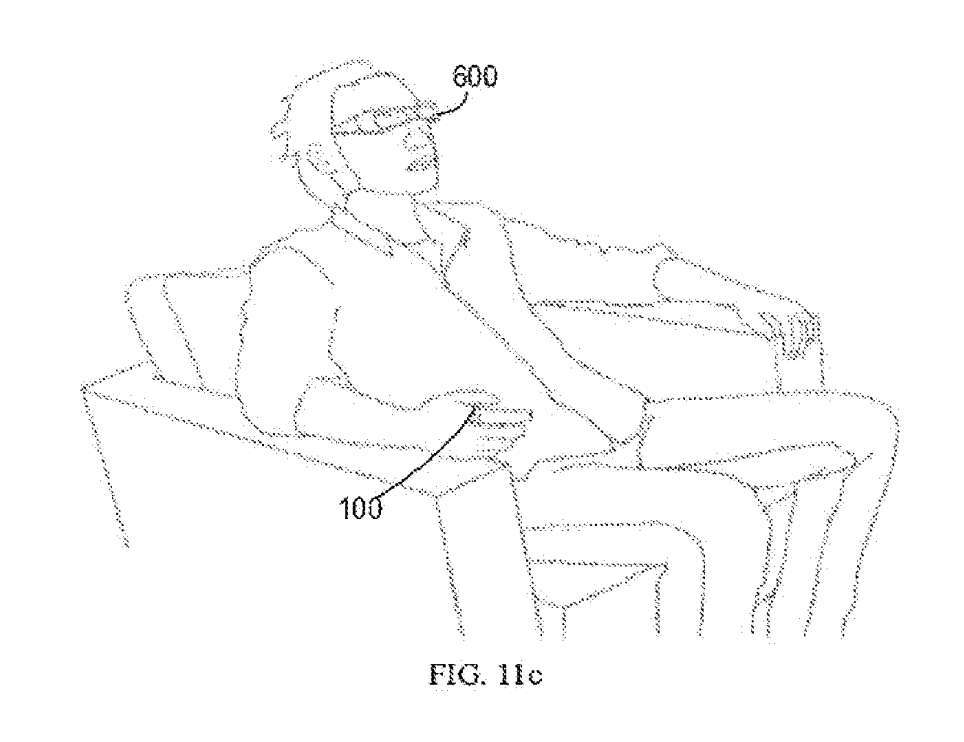
Comme le montre la figure 11c, un dispositif portable 100 tel qu'une bague est utilisé avec un visiocasque. Microsoft a déclaré que les méthodes existantes de contrôle du casque utilisent la voix, les gestes de survol ou les contrôleurs traditionnels. Cependant, la commande vocale impliquera inévitablement des problèmes de confidentialité, et les gestes de survol peuvent provoquer une fatigue intense. En revanche, le dispositif portable 100 ne nécessite pas que l'utilisateur lève la main et est suffisamment privé pour pouvoir être utilisé dans une poche.
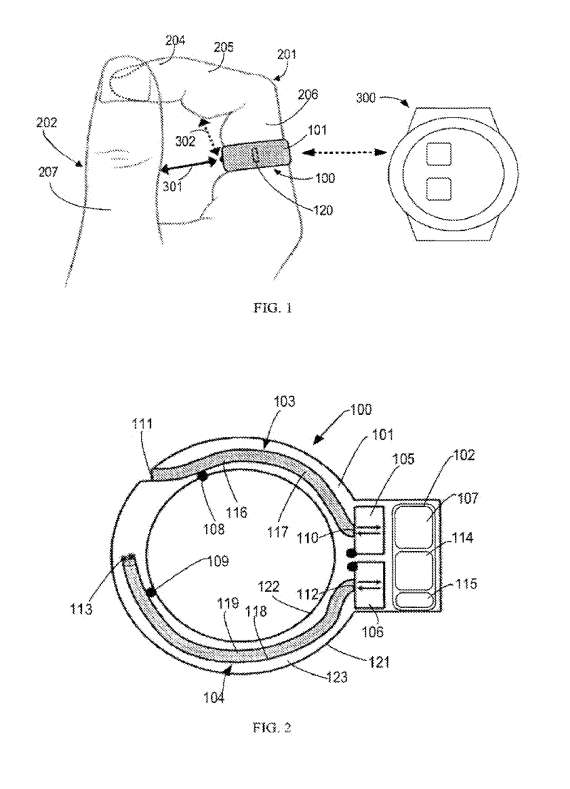
Comme le montre la figure 2, il s'agit d'un exemple montrant la structure du dispositif portable 100. Le dispositif portable 100 adopte un boîtier en forme d'anneau 101, qui est composé d'un côté extérieur 121, d'un côté intérieur 122 et d'une partie latérale 123 entre eux.
Le dispositif portable 100 comprend au moins deux capteurs 105, 106, respectivement appelés premier capteur 105 et deuxième capteur 106. Ces deux capteurs permettent de détecter le mouvement d'au moins deux doigts différents de l'utilisateur.
Le premier capteur 105 et/ou le deuxième capteur 106 peuvent être des capteurs de proximité infrarouge. Les capteurs de proximité infrarouges présentent les caractéristiques d'une petite taille, d'un poids léger, d'une faible consommation d'énergie et d'un faible coût, ce qui rend les appareils portables encore plus légers et à faible consommation d'énergie. Il faut comprendre que d'autres types de capteurs de mesure de distance tels que des capteurs optiques, des capteurs capacitifs et des capteurs à ultrasons peuvent être utilisés. Lorsque la transmission de la lumière n'est pas requise, elle peut être omise ou ajustée à d'autres structures selon les besoins.
Le premier capteur 105 est configuré pour détecter au moins un mouvement du premier doigt 201 ou un segment de celui-ci, et le deuxième capteur 106 est configuré pour détecter au moins un mouvement du deuxième doigt 202 ou un segment de celui-ci.
L'un ou les deux des premier et deuxième capteurs 105,106 peuvent détecter le mouvement de plusieurs parties du doigt correspondant. Par rapport aux mouvements de haute intensité, les mouvements des doigts 105, 106 qui doivent être détectés par les premier et deuxième capteurs ne sont que des mouvements relatifs entre deux doigts différents. Il s’agit d’un mouvement très subtil qui nécessite de petits mouvements musculaires et aucun mouvement des mains. Par conséquent, les mouvements qui doivent être détectés sont moins fatigants, ce qui permet à l'utilisateur de porter le dispositif portable 100 pendant une longue période comme s'il portait une bague ordinaire.
De plus, seuls deux doigts sont nécessaires pour participer à l'interaction, ce qui est préférable à une opération à une seule main car les trois autres doigts peuvent toujours effectuer d'autres tâches, comme tenir un sac.
Le dispositif portable 100 comprend également un module de commande 102. Le module de commande 102 peut comprendre un contrôleur 107, une batterie 115 et un module de communication 114. Comme le montre la figure 2, le module de commande 102 peut être disposé au-dessus d'un boîtier annulaire 101, similaire à la forme en losange au-dessus d'un boîtier en forme de losange. Ceci permet de réduire l'épaisseur du logement annulaire 101. Par exemple, la coque 101 peut avoir une épaisseur inférieure à 1 mm et peut être facilement portée toute la journée sans aucune gêne.
Le contrôleur 107 détermine le mouvement relatif entre les deux doigts 201 et 202 en recevant et en analysant les données de mouvement des doigts détectées par les premier et deuxième capteurs 105 et 106. Un tel mouvement relatif entre deux doigts définit un geste à deux doigts. De plus, étant donné que seuls des mouvements de doigt relativement simples et minuscules doivent être détectés, le contrôleur 107 peut être mis en œuvre sous la forme d'un microcontrôleur miniature de faible consommation et peu coûteux, tel qu'un MCU 8 bits. Cela peut réduire davantage la taille du dispositif portable 100.
Afin de détecter le mouvement des doigts 201, 202, le dispositif portable 100 peut comprendre une pluralité de composants conducteurs, tels qu'un premier composant conducteur 103 et un deuxième composant conducteur 104. Le premier composant conducteur 103 a une première extrémité 110 et une deuxième extrémité 111. La première extrémité 110 est couplée au premier capteur 105 et la deuxième extrémité 111 fait face au premier doigt 201. De même, le deuxième ensemble conducteur 104 peut avoir une troisième extrémité 112 couplée au deuxième capteur 106 et une quatrième extrémité 113 faisant face au deuxième doigt 202. De cette manière, en alignant l'orientation des deux extrémités de l'ensemble conducteur, les mouvements des différents doigts peuvent être détectés.
La deuxième extrémité 111 et la quatrième extrémité 113 peuvent être situées au fond du boîtier annulaire 101, comme le montre la figure 2. Au moins l'une de la deuxième extrémité 111 et de la quatrième extrémité 113 peut être située n'importe où entre le fond et les côtés du boîtier annulaire 101.
Le premier composant conducteur 103 est composé d'une première fibre optique 116 et d'une deuxième fibre optique 117. Par exemple, la première fibre optique 116 et la deuxième fibre optique 117 peuvent être disposées dans le premier canal 108 à l'intérieur du boîtier 101. Le premier canal 108 est une structure creuse qui peut réduire le poids du dispositif portable 100.
Le module 102 est utilisé pour contrôler le système, qui comprend un module de communication 114 pour communiquer avec le terminal 300 sur la figure 1. Le dispositif terminal 300 peut être câblé ou sans fil. Le module de communication 114 peut utiliser un module Bluetooth à faible consommation d'énergie.
En référence à la figure 2, le module de contrôle 102 peut inclure une batterie 115. Étant donné que la consommation d'énergie du contrôleur 107, des premier et deuxième capteurs 105, 106 et des autres composants nécessaires est très faible, la taille de la batterie 115 peut être très petite.
Vous trouverez ci-dessous des exemples de gestes multi-doigts.
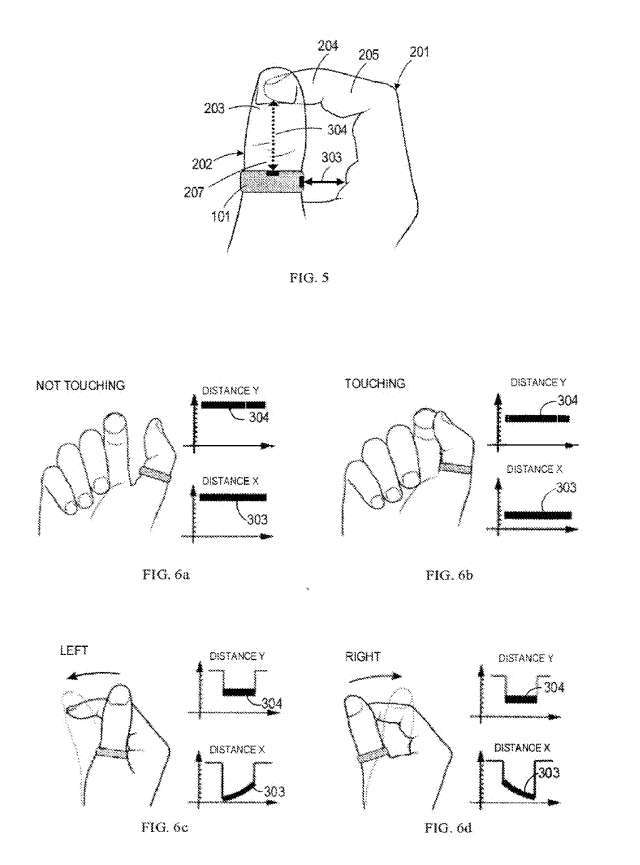
En référence à la figure 1, dans cet exemple, il est supposé que le dispositif portable 100 est porté sur le segment de base 206 de l'index 201. Dans ce cas, la deuxième extrémité 111 du premier composant conducteur 103 fait face au côté du pouce 202 de sorte que le premier capteur 105 puisse détecter la première distance 301 du côté du pouce 202 au premier capteur 105.
Placez la quatrième extrémité 113 du deuxième composant conducteur 103 vers la partie ventrale de la carrure 205 de l'index 201, afin que le deuxième capteur 106 puisse détecter le mouvement de la partie ventrale de la carrure 205 de l'index 201 au deuxième capteur 106 Deuxième distance 302.
En raison de la taille plus petite du boîtier annulaire 101, la première distance 301 est essentiellement la distance relative de la partie latérale du pouce 202 au segment de base 206 de l'index 201, tandis que la deuxième distance 302 est essentiellement la distance relative. de la partie ventrale de la partie médiane 205 jusqu'à l'index la distance de corrélation du segment de base 206 de 201. De cette manière, les premier et deuxième capteurs 105, 106 peuvent détecter un ou plusieurs ensembles de mouvements.
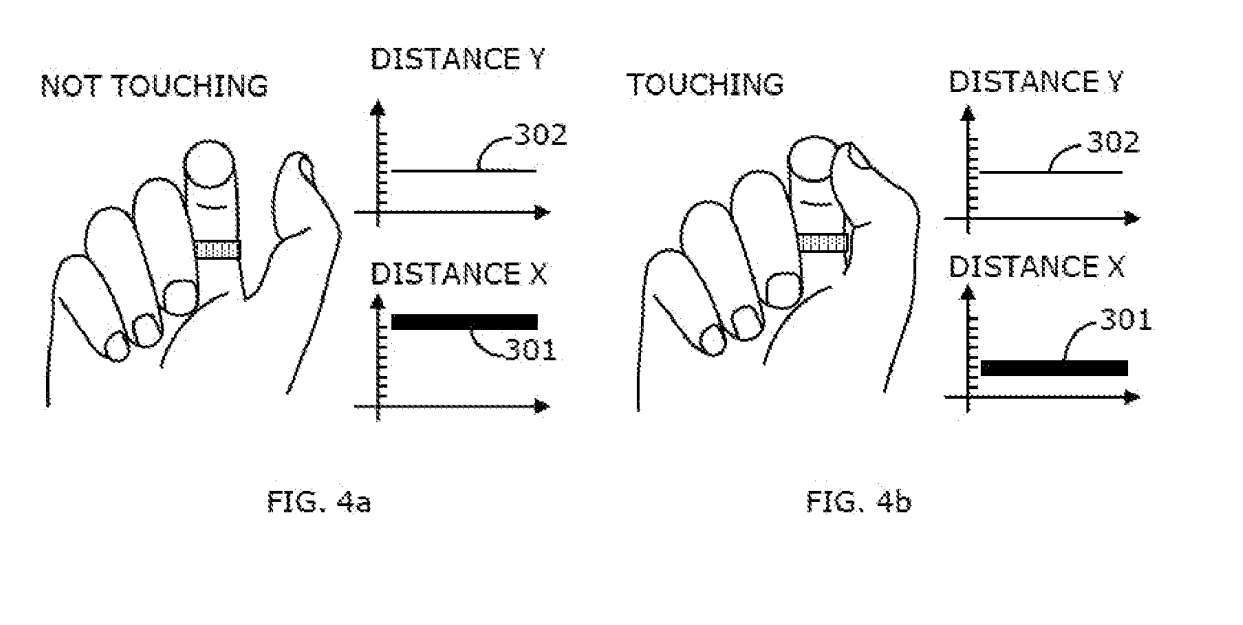
Selon le mode gestuel à simple action représenté sur la figure 4a, lorsque le pouce 202 n'entre pas en contact avec l'index 201 et reste immobile, la distance détectée par le premier capteur 105 (appelée distance X 301) et la distance détectée par le second le capteur 106 (appelé distance Y 302) reste inchangé. Par exemple, la distance X301 reste X1 et la distance Y302 reste Y1.
Dans ce scénario, nous pouvons voir que le pouce 202 sur la photo touche l'index 201 et reste immobile. Dans ce cas, les distances respectivement détectées par le premier capteur 105 et le deuxième capteur 106 restent inchangées. Cependant, la position du pouce 202 ayant changé, la distance x301 reste X2, qui peut être inférieure à X1.
Dans ce cas, la valeur de la distance X peut indiquer si le pouce 202 est en contact avec l'index, ce qui à son tour peut indiquer si le mouvement commence ou se termine. On peut voir que le contrôleur 107 peut détecter le geste multi-doigts en déterminant la distance relative entre le premier et le deuxième doigts 201 et 202.
Dans un mode de réalisation, le contrôleur 107 peut détecter un geste multi-doigts en déterminant le glissement relatif entre le premier et le deuxième doigts 201, 202 sur la base du premier et du deuxième ensemble d'actions. En réponse à différentes directions de glissement, le contrôleur 107 peut déclencher différentes actions.
Lorsque le contrôleur 107 détecte que le premier doigt 201 glisse le long du deuxième doigt 202 de gauche à droite, il déclenche une action spécifique associée au terminal 300. De même, lorsque le contrôleur 107 détecte que le premier doigt 201 glisse le long du deuxième doigt 202 de droite à gauche, il déclenchera également une autre action spécifique associée au dispositif terminal 300.
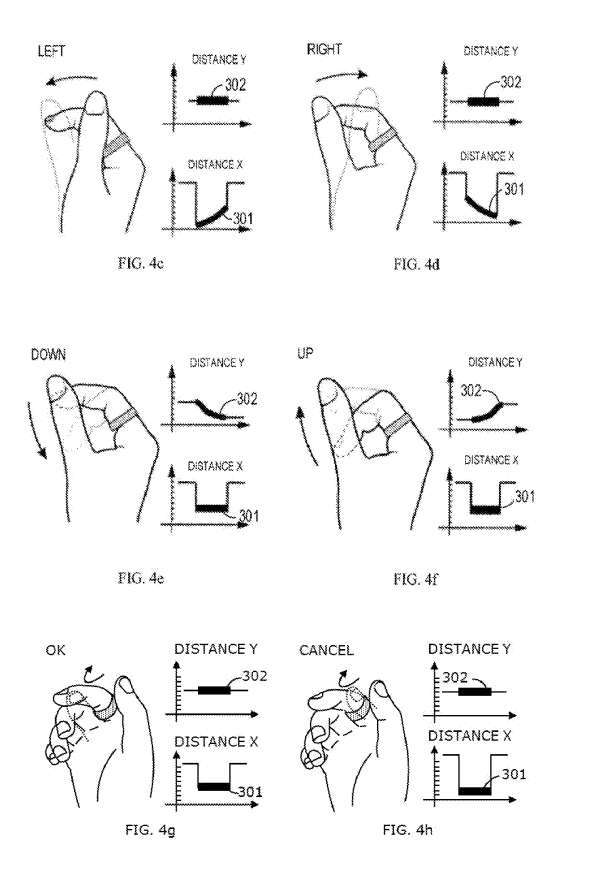
Les figures 4c à 4d montrent comment la distance X 301 et la distance Y 302 changeront si le pouce 202 glisse le long de l'index. Lorsque le côté ventral du pouce 202 glisse de gauche à droite le long de l'index 201, le deuxième capteur 106 peut détecter le glissement du pouce 202 et envoyer les données détectées au contrôleur 107. Dans le même temps, le premier capteur 105 peut détecter que l'index 201 maintient sa position et envoie les données détectées au contrôleur 107, comme le montre la figure 4d.
Sur la base des premier et deuxième ensembles de mouvements mentionnés ci-dessus, le contrôleur 107 peut détecter le geste multi-doigts en déterminant les mouvements relatifs mentionnés ci-dessus entre l'index 201 et le pouce 202. Ensuite, sur la base du geste multi-doigts, le contrôleur 107 déclenche une action associée au dispositif terminal 300.
Par exemple, le contrôleur 107 peut générer un signal de commande correspondant à la « bonne » opération pour contrôler le terminal 300. De même, pour que le côté ventral du pouce 202 glisse de droite à gauche le long de l'index 201, comme le montre la figure 4c, sur la base du geste multi-doigts détecté en déterminant le mouvement relatif mentionné ci-dessus entre l'index 201. et le pouce 202, le contrôleur 107 génère un signal de commande correspondant à l'opération « gauche » et déclenchant une action associée au dispositif terminal 300.
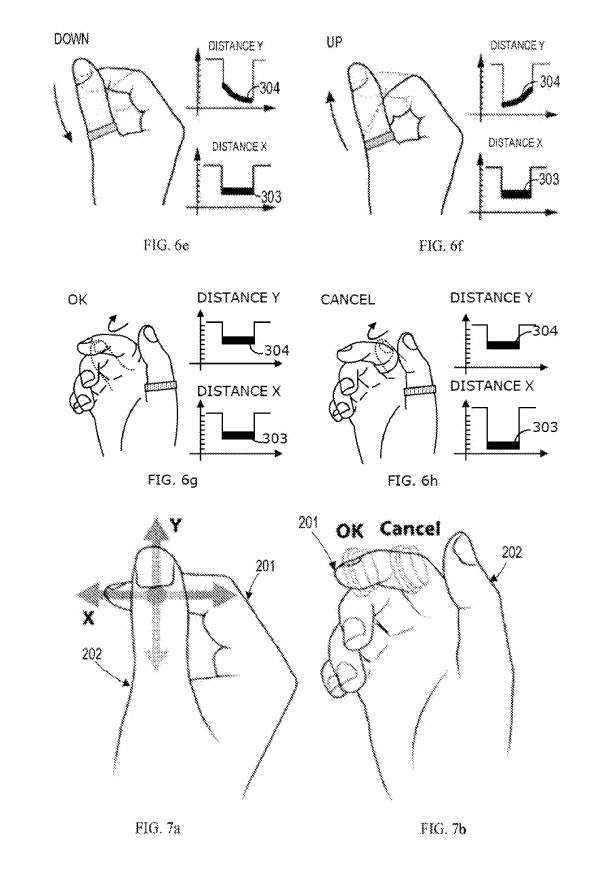
Les figures 4e à 4f montrent les changements de distance X 301 et de distance Y 302 lorsque l'index 201 glisse de haut en bas le long du pouce 202. Semblable à ce qui précède, lorsque la partie latérale de l'index 201 glisse vers le bas le long du pouce 202, le deuxième capteur 106 peut détecter que la partie ventrale de la section médiane 205 de l'index 201 se déplace vers le bas et envoyer les données détectées. au contrôleur 107 . Dans le même temps, le premier capteur 105 peut détecter que le pouce 202 est dans un état stationnaire et envoyer les données détectées au contrôleur 107, comme le montre la figure 4e.
Sur la base des premier et deuxième ensembles de mouvements mentionnés ci-dessus, le contrôleur 107 peut détecter le geste multi-doigts en déterminant les mouvements relatifs mentionnés ci-dessus entre l'index 201 et le pouce 202. Ensuite, sur la base du geste multi-doigts, le contrôleur 107 déclenche une action associée au dispositif terminal 300 et contrôle le dispositif terminal 300 en générant un signal de commande correspondant à l'opération « vers le bas », comme le montre la figure 4e.
De même, pour le geste multi-doigts détecté en déterminant le mouvement relatif mentionné ci-dessus entre l'index 201 et le pouce 202 comme le montre la figure 4f, pour que la partie ventrale de la section médiane 205 de l'index 201 glisse vers le haut. le long du pouce 202, le contrôleur 107 passe. Un signal de commande correspondant à l'opération « montée » est généré pour déclencher une action associée au dispositif terminal 300.
Dans un mode de réalisation, le contrôleur 107 peut détecter le geste de tapotement en déterminant le mouvement relatif entre le premier et le deuxième doigt 201, 202.
Pour différents segments de tapotement du doigt, le contrôleur 107 peut déclencher différentes actions. Par exemple, le contrôleur 107 peut déclencher la première action en réponse à la détection que le premier doigt 201 tape sur la deuxième partie du deuxième doigt 202 et déclencher la première action en réponse à la détection que le premier doigt 201 tape sur la troisième partie du deuxième doigt. doigt 202. Une deuxième action différente de la première.
La figure 4 montre comment la distance X 301 et la distance Y 302 changent lorsque le pouce 202 tape sur le segment le plus externe 204 (c'est-à-dire le troisième segment) de l'index ou tape près du segment le plus externe 204. Dans ce cas, le premier capteur 105 peut détecter que le pouce 202 s'approche et/ou s'éloigne du segment le plus externe 204 et envoyer les données détectées au contrôleur 107, tandis que le deuxième capteur 106 peut détecter que l'index reste immobile. , et envoyer les données détectées au contrôleur 107, comme le montre la figure 4e.
Sur la base des premier et deuxième ensembles de mouvements mentionnés ci-dessus, le contrôleur 107 détecte le geste multi-doigts en déterminant les mouvements relatifs mentionnés ci-dessus entre l'index 201 et le pouce 202. Ensuite, sur la base du geste multi-doigts, le contrôleur 107 déclenche une action associée au dispositif terminal 300 en générant un signal de commande correspondant à l'opération OK.
La figure 4h montre les changements de distance X 301 et de distance Y 302 lorsque le pouce 202 tape sur le segment médian 205 de l'index ou tape près du segment médian 205. Dans ce cas, le premier capteur 105 peut détecter que le pouce 202 se rapproche et/ou s'éloigne de la section médiane 205 et envoie les données détectées au contrôleur 107. En même temps, le deuxième capteur 106 peut détecter que l'index ne bouge pas et envoyer les données détectées au contrôleur 107, comme le montre la figure 4e.
Sur la base des première et deuxième séries de mouvements ci-dessus, le contrôleur 107 peut reconnaître le geste multi-doigts en détectant le mouvement relatif entre l'index 201 et le pouce 202. Ensuite, le contrôleur 107 génère un signal de commande correspondant à l'opération « annuler » en fonction du geste multi-doigts pour déclencher une autre action associée à celle-ci sur le dispositif terminal 300.
Comme on peut le voir ci-dessus, le premier capteur 105 et le deuxième capteur 106 peuvent détecter un ou plusieurs mouvements relatifs subtils entre l'index 201 et le pouce 202, et le contrôleur 107 peut le détecter en déterminant un ensemble d'un ou plus de mouvements. Gestes multi-doigts, et commande du dispositif terminal associé 300 sur la base des gestes multi-doigts. Ces mouvements sollicitent moins de muscles que les mouvements « suspendre » ou « lever les mains », réduisant ainsi la fatigue pendant l'opération.
De plus, les actions pouvant être détectées par les premier et deuxième capteurs 105 et 106 sont très intuitives et faciles à comprendre. Dans le même temps, un retour tactile naturel peut être obtenu lors de l'exécution des actions, de sorte que les yeux peuvent être totalement inutiles pour effectuer les actions des officiers vedettes.
En plus des opérations régulières du curseur directionnel, en mode geste à mouvement unique, en détectant des gestes multi-doigts spécifiques, le dispositif portable 100 peut mettre en œuvre des fonctions de curseur X-Y (7a) et de double bouton (7b). Par conséquent, le dispositif portable 100 peut servir de mode d'entrée pour un dispositif tel qu'un visiocasque.
En plus des gestes à un seul doigt, les gestes associés peuvent inclure des gestes à plusieurs doigts, comme indiqué en 8a et 8b. Dans ce cas, le contrôleur 107 peut déclencher une ou plusieurs actions en générant un signal de commande en fonction d'un ensemble d'actions, telles que le mouvement de glissement rythmique et répété du premier doigt 201 le long du deuxième doigt 202, le premier doigt 201 étant relativement multiple. mouvements de tapotement du deuxième doigt 202, ou une combinaison de ceux-ci.
Par exemple, dans le mode geste multi-actions, pour que le premier doigt 201 répète rythmiquement le mouvement de glissement de la navette le long du deuxième doigt 202, le contrôleur 107 peut détecter le geste multi-doigts en déterminant le groupe d'actions ci-dessus. Sur la base du geste multi-doigts détecté, le contrôleur 107 peut déclencher une action, c'est-à-dire une première action, en générant, par exemple, un signal de commande correspondant à une opération d'activation qui active une fonction spécifique du dispositif terminal associé.
En réponse au deuxième doigt 202 répétant rythmiquement le mouvement de glissement de la navette le long du premier doigt 201, le contrôleur 107 peut détecter le geste multi-doigts en déterminant l'ensemble de mouvements ci-dessus. Sur la base du geste multi-doigts détecté, le contrôleur 107 peut déclencher une autre action, à savoir une deuxième action.
Par exemple, en réponse à un mouvement de glissement de navette rapide (par exemple, plus d'environ 120/min) répété rythmiquement du premier doigt 201 le long du deuxième doigt 202 plusieurs fois (par exemple, plus de 3 fois), le contrôleur 107 peut déterminer L'ensemble de mouvements ci-dessus est utilisé pour détecter les gestes à plusieurs doigts. Sur la base du geste multi-doigts détecté, le contrôleur 107 peut déclencher une action en générant un signal de commande.
On peut voir que dans le mode gestuel multi-actions, le contrôleur 107 peut déclencher davantage d'actions sur la base de plusieurs ensembles d'actions, c'est-à-dire que le dispositif portable 100 peut contrôler le terminal de plusieurs manières.
Dans le mode gestuel multi-actions, un ensemble d'actions qui peuvent amener le contrôleur 107 à déclencher une action devrait être un ensemble d'actions spéciales qui apparaissent rarement dans notre vie quotidienne. Par exemple, en utilisant un ensemble de mouvements rythmiques rares, tels que rapide-vite-lent-vite ou lent-vite-lent-vite. « Rapide » fait référence ici à un mouvement de glissement rapide du premier doigt 201 le long du deuxième doigt 202, et « lent » fait référence à un mouvement de glissement rapide.
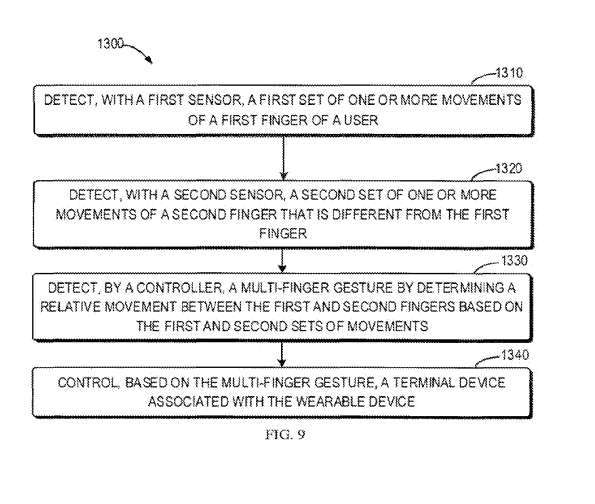
La figure 9 montre un organigramme de la méthode mise en œuvre dans le dispositif portable 100.
En 1320, un deuxième ensemble d'un ou plusieurs mouvements du deuxième doigt 202 différent du premier doigt 201 est détecté avec le deuxième capteur 106.
Ensuite, en 1330, grâce au contrôleur 107, sur la base des premier et deuxième ensembles de mouvements, nous pouvons déterminer le mouvement relatif entre le premier et le deuxième doigts 201, 202, réalisant ainsi la détection de gestes multi-doigts.
En 1340, il y a un dispositif terminal 300 et un dispositif portable 100 qui sont associés l'un à l'autre via une commande gestuelle multi-doigts.
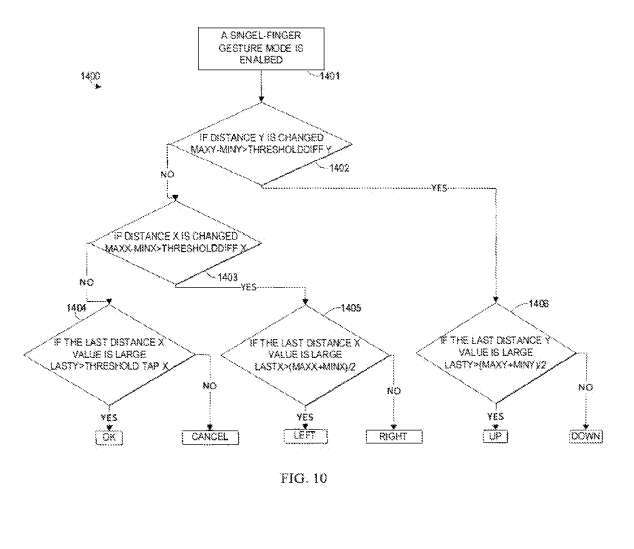
Lorsque le dispositif portable 100 est porté sur l'index, la figure 10 montre un exemple du contrôleur 107 exécutant l'algorithme de reconnaissance 1400 en mode geste à mouvement unique.
En 1401, le mode geste à mouvement unique est activé, puis en 1402, le contrôleur 107 détermine si la distance y302 change selon que la différence entre la distance maximale Y et la distance minimale Y est supérieure ou inférieure à la différence de seuil Y, et la distance maximale Y représente la troisième valeur maximale détectée par le deuxième capteur 106 au cours d'une période de reconnaissance. De même, la distance minimale Y représente la valeur minimale détectée par le deuxième capteur 106 au cours d'une période de reconnaissance. La distance maximale X fait référence à la valeur maximale détectée par le premier capteur 105 au cours d'un cycle de reconnaissance, et la distance minimale X fait référence à la valeur minimale détectée par le premier capteur 105 au cours d'un cycle de reconnaissance.
En 1406, dans le cas où la distance y302 change, c'est-à-dire que la différence entre la distance maximale Y et la distance minimale Y est supérieure à la différence de seuil Y, alors le contrôleur 107 détecte le geste multi-doigts en déterminant si le la distance finale Y est grande, en déterminant si la distance finale Y est supérieure à la moyenne de la distance maximale Y et de la distance minimale Y.
Si la distance finale Y est supérieure à la valeur moyenne, c'est-à-dire que la distance finale Y est plus grande, le contrôleur 107 peut détecter le geste multi-doigts correspondant à l'action définie dans laquelle la face ventrale de la section médiane 205 du l'index 201 se déplace vers le haut. Le contrôleur 107 déclenche alors l'action en générant un signal de commande correspondant à l'opération « montée ». Au contraire, si la distance finale Y est inférieure à la valeur moyenne, c'est-à-dire que la distance finale Y est plus petite. De cette manière, le contrôleur 107 peut détecter un geste multi-doigts correspondant à un ensemble de mouvements dans lesquels le côté ventral du segment médian 205 de l'index 201 se déplace vers le bas. Le contrôleur 107 déclenche l'action en générant un signal de commande correspondant à l'opération « down ».
Lorsque la distance y302 reste inchangée, c'est-à-dire que la différence entre la distance maximale Y et la distance minimale Y est fondamentalement égale à la différence de seuil Y, le contrôleur 107 détermine la distance x301 en déterminant si la différence entre la distance maximale X et la distance minimale X est supérieure à la différence de seuil X si des changements se sont produits. Ensuite, le contrôleur 107 détermine si la distance finale X est grande en déterminant si la distance finale X est supérieure à la valeur moyenne de la distance maximale X et de la distance minimale X, détectant ainsi le geste multi-doigts.
Si la distance finale X est supérieure à la valeur moyenne, c'est-à-dire la distance finale Le contrôleur 107 déclenche alors une action en générant un signal de commande correspondant à l'opération « gauche ».
Si la distance finale Le contrôleur 107 déclenche alors une action en générant un signal de commande correspondant à la « bonne » opération.
De même, l'algorithme de reconnaissance des gestes multi-actions est également très simple. Comme mentionné ci-dessus, des ensembles d'actions spéciales pour les gestes multi-actions peuvent être prédéfinis par l'utilisateur ou définis manuellement. L'algorithme de reconnaissance peut ensuite générer un signal de commande spécifique en détectant si un ensemble de mouvements effectués par l'utilisateur est sensiblement cohérent avec un mouvement particulier, et amener le contrôleur 107 à déclencher une action.
En utilisant la simplicité de l'algorithme de reconnaissance et en adoptant un module Bluetooth à faible consommation d'énergie comme module de communication 114, une faible consommation d'énergie du dispositif portable 100 peut être obtenue.
Brevets associés : Brevet Microsoft | Appareil portable permettant des gestes à plusieurs doigts
La demande de brevet Microsoft intitulée « Appareil portable permettant des gestes multi-doigts » a été initialement soumise en août 2023 et a été récemment publiée par l'Office américain des brevets et des marques.
Il est à noter que, de manière générale, après examen d'une demande de brevet américain, elle sera automatiquement publiée 18 mois à compter de la date de dépôt ou de la date de priorité, ou elle sera publiée dans les 18 mois à compter de la date de dépôt à la demande du demandeur. Notez que la publication d'une demande de brevet ne signifie pas que le brevet est approuvé. Après le dépôt d’une demande de brevet, l’USPTO exige un véritable examen, qui peut prendre de 1 à 3 ans.
De plus, il ne s'agit que d'une demande de brevet, ce qui ne signifie pas qu'elle sera approuvée. En même temps, on ne sait pas si elle sera réellement commercialisée ni quel sera l'effet réel de son application.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 J'ai essayé le codage d'ambiance avec Cursor Ai et c'est incroyable!
Mar 20, 2025 pm 03:34 PM
J'ai essayé le codage d'ambiance avec Cursor Ai et c'est incroyable!
Mar 20, 2025 pm 03:34 PM
Le codage des ambiances est de remodeler le monde du développement de logiciels en nous permettant de créer des applications en utilisant le langage naturel au lieu de lignes de code sans fin. Inspirée par des visionnaires comme Andrej Karpathy, cette approche innovante permet de dev
 Top 5 Genai Lunets de février 2025: GPT-4.5, Grok-3 et plus!
Mar 22, 2025 am 10:58 AM
Top 5 Genai Lunets de février 2025: GPT-4.5, Grok-3 et plus!
Mar 22, 2025 am 10:58 AM
Février 2025 a été un autre mois qui change la donne pour une IA générative, nous apportant certaines des mises à niveau des modèles les plus attendues et de nouvelles fonctionnalités révolutionnaires. De Xai's Grok 3 et Anthropic's Claude 3.7 Sonnet, à Openai's G
 Comment utiliser YOLO V12 pour la détection d'objets?
Mar 22, 2025 am 11:07 AM
Comment utiliser YOLO V12 pour la détection d'objets?
Mar 22, 2025 am 11:07 AM
Yolo (vous ne regardez qu'une seule fois) a été un cadre de détection d'objets en temps réel de premier plan, chaque itération améliorant les versions précédentes. La dernière version Yolo V12 introduit des progrès qui améliorent considérablement la précision
 Meilleurs générateurs d'art AI (gratuit & amp; payé) pour des projets créatifs
Apr 02, 2025 pm 06:10 PM
Meilleurs générateurs d'art AI (gratuit & amp; payé) pour des projets créatifs
Apr 02, 2025 pm 06:10 PM
L'article passe en revue les meilleurs générateurs d'art AI, discutant de leurs fonctionnalités, de leur aptitude aux projets créatifs et de la valeur. Il met en évidence MidJourney comme la meilleure valeur pour les professionnels et recommande Dall-E 2 pour un art personnalisable de haute qualité.
 Chatgpt 4 o est-il disponible?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o est-il disponible?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 est actuellement disponible et largement utilisé, démontrant des améliorations significatives dans la compréhension du contexte et la génération de réponses cohérentes par rapport à ses prédécesseurs comme Chatgpt 3.5. Les développements futurs peuvent inclure un interg plus personnalisé
 Meilleurs chatbots AI comparés (Chatgpt, Gemini, Claude & amp; plus)
Apr 02, 2025 pm 06:09 PM
Meilleurs chatbots AI comparés (Chatgpt, Gemini, Claude & amp; plus)
Apr 02, 2025 pm 06:09 PM
L'article compare les meilleurs chatbots d'IA comme Chatgpt, Gemini et Claude, en se concentrant sur leurs fonctionnalités uniques, leurs options de personnalisation et leurs performances dans le traitement et la fiabilité du langage naturel.
 Comment utiliser Mistral OCR pour votre prochain modèle de chiffon
Mar 21, 2025 am 11:11 AM
Comment utiliser Mistral OCR pour votre prochain modèle de chiffon
Mar 21, 2025 am 11:11 AM
Mistral OCR: révolutionner la génération de la récupération avec une compréhension du document multimodal Les systèmes de génération (RAG) (RAG) de la récupération ont considérablement avancé les capacités d'IA, permettant à de vastes magasins de données pour une responsabilité plus éclairée
 Assistants d'écriture de l'IA pour augmenter votre création de contenu
Apr 02, 2025 pm 06:11 PM
Assistants d'écriture de l'IA pour augmenter votre création de contenu
Apr 02, 2025 pm 06:11 PM
L'article traite des meilleurs assistants d'écriture d'IA comme Grammarly, Jasper, Copy.ai, WireSonic et Rytr, en se concentrant sur leurs fonctionnalités uniques pour la création de contenu. Il soutient que Jasper excelle dans l'optimisation du référencement, tandis que les outils d'IA aident à maintenir le ton
