
 Périphériques technologiques
IA
Grand modèle + robot, un rapport d'examen détaillé est ici, avec la participation de nombreux chercheurs chinois
Périphériques technologiques
IA
Grand modèle + robot, un rapport d'examen détaillé est ici, avec la participation de nombreux chercheurs chinois
Grand modèle + robot, un rapport d'examen détaillé est ici, avec la participation de nombreux chercheurs chinois

Les capacités exceptionnelles des grands modèles sont évidentes pour tous, et s'ils sont intégrés dans des robots, on s'attend à ce que les robots aient un cerveau plus intelligent, apportant de nouvelles possibilités au domaine de la robotique, comme la conduite autonome, les robots domestiques, les robots industriels. robots, robots auxiliaires, robots médicaux, robots de terrain et systèmes multi-robots.
Le grand modèle de langage (LLM), le grand modèle de langage de vision (VLM), le grand modèle de langage audio (ALM) et le grand modèle de navigation visuelle (VNM) pré-entraînés peuvent être utilisés pour mieux gérer divers problèmes dans le domaine de la robotique. Tâche. L'intégration de modèles de base en robotique est un domaine en pleine croissance, et la communauté robotique a récemment commencé à explorer l'utilisation de ces grands modèles dans des domaines robotiques qui doivent être réécrits : la perception, la prédiction, la planification et le contrôle.
Récemment, une équipe de recherche conjointe composée de l'Université de Stanford, de l'Université de Princeton, de NVIDIA, de Google DeepMind et d'autres sociétés a publié un rapport d'analyse résumant le développement et les défis futurs des modèles de base dans le domaine de la recherche en robotique
Papier adresse : https://arxiv.org/pdf/2312.07843.pdf
Le contenu réécrit est : Bibliothèque papier : https://github.com/robotics-survey/Awesome-Robotics-Foundation -Models
Parmi les membres de l’équipe, nous connaissons de nombreux universitaires chinois, notamment Zhu Yuke, Song Shuran, Wu Jiajun, Lu Cewu, etc.
Les modèles de base qui sont pré-entraînés de manière approfondie à l'aide de données à grande échelle peuvent être appliqués à diverses tâches en aval après un réglage fin. Ces modèles de base ont réalisé des avancées majeures dans les domaines de la vision et du traitement du langage, y compris des modèles associés tels que BERT, GPT-3, GPT-4, CLIP, DALL-E et PaLM-E
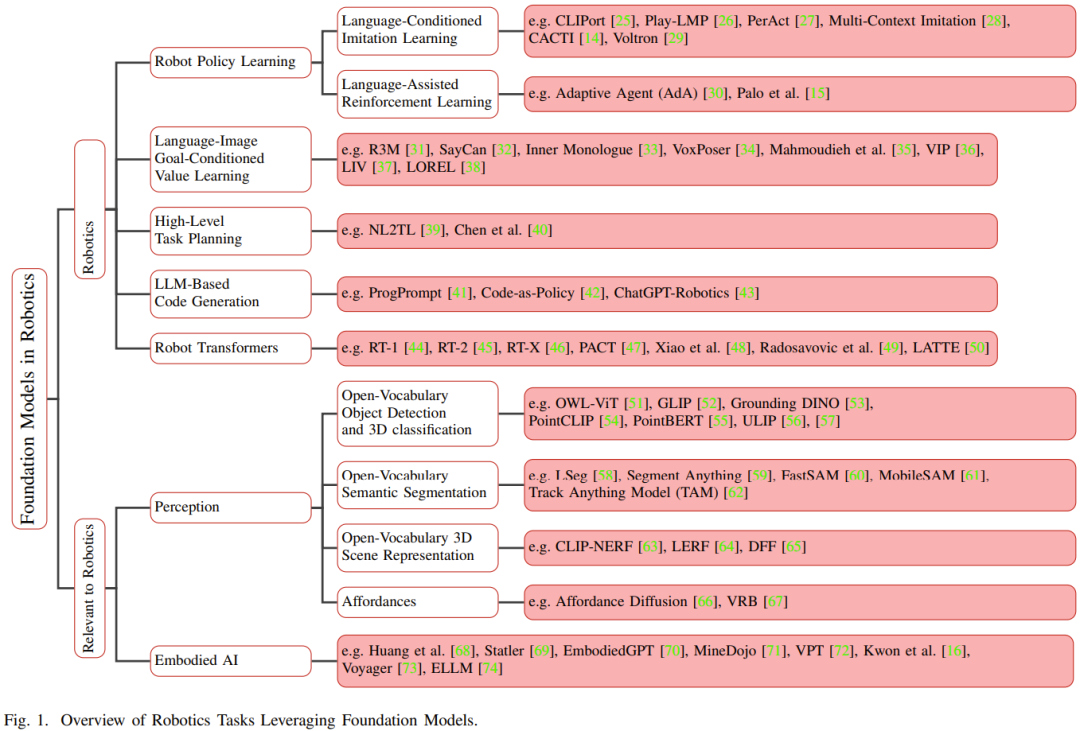
Avant l'émergence des modèles de base, pour les robots Les modèles traditionnels d'apprentissage en profondeur sont formés à l'aide d'ensembles de données limités collectés pour différentes tâches. En revanche, les modèles de base sont pré-entraînés à l'aide d'un large éventail de données diverses et ont démontré leur adaptabilité, leur généralisation et leurs performances globales dans d'autres domaines tels que le traitement du langage naturel, la vision par ordinateur et les soins de santé. A terme, le modèle de base devrait également montrer son potentiel dans le domaine de la robotique. La figure 1 montre un aperçu du modèle de base dans le domaine de la robotique.
Par rapport aux modèles spécifiques à des tâches, le transfert de connaissances à partir de modèles de base a le potentiel de réduire le temps de formation et les ressources informatiques. En particulier dans les domaines liés à la robotique, les modèles de base multimodaux peuvent fusionner et aligner des données hétérogènes multimodales collectées à partir de différents capteurs en représentations homogènes compactes, nécessaires à la compréhension et au raisonnement des robots. Les représentations apprises peuvent être utilisées dans n’importe quelle partie de la pile technologique d’automatisation, y compris celles qui doivent être réécrites : perception, prise de décision et contrôle.
De plus, le modèle de base peut également fournir des capacités d'apprentissage sans tir, ce qui permet au système d'IA d'effectuer des tâches sans aucun exemple ni formation ciblée. Cela permet au robot de généraliser les connaissances acquises à de nouveaux cas d'utilisation, améliorant ainsi son adaptabilité et sa flexibilité dans des environnements non structurés.
L'intégration du modèle de base dans le système robotique peut améliorer la capacité du robot à percevoir l'environnement et à interagir avec l'environnement. Il est possible de réaliser le contexte qui doit être réécrit : le système robotique perceptuel.
Par exemple, ce qui doit être réécrit est : dans le domaine de la perception, les modèles de langage visuel (VLM) à grande échelle peuvent apprendre l'association entre les données visuelles et textuelles, afin d'avoir des capacités de compréhension multimodale, aidant ainsi classification d'images sans prise de vue, tâches telles que la détection d'objets sans échantillon et la classification 3D. Comme autre exemple, l'ancrage du langage (c'est-à-dire l'alignement de la compréhension contextuelle du VLM avec le monde réel 3D) dans le monde 3D peut améliorer les besoins spatiaux du robot en associant des énoncés à des objets, des emplacements ou des actions spécifiques dans l'environnement 3D. Réécrit : capacité de perception. .
Dans le domaine de la prise de décision ou de la planification, des recherches ont montré que LLM et VLM peuvent aider les robots à spécifier des tâches impliquant une planification de haut niveau.
En tirant parti des indices linguistiques liés au fonctionnement, à la navigation et à l'interaction, les robots peuvent effectuer des tâches plus complexes. Par exemple, pour les technologies robotiques d’apprentissage des politiques telles que l’apprentissage par imitation et l’apprentissage par renforcement, le modèle de base semble avoir la capacité d’améliorer l’efficacité des données et la compréhension du contexte. En particulier, les récompenses basées sur le langage peuvent guider les agents d’apprentissage par renforcement en leur fournissant des récompenses structurées.
De plus, les chercheurs utilisent déjà des modèles linguistiques pour fournir des commentaires sur la technologie d'apprentissage des politiques. Certaines études ont montré que les capacités de réponse visuelle aux questions (VQA) des modèles VLM peuvent être utilisées pour des cas d'utilisation de la robotique. Par exemple, les chercheurs ont utilisé VLM pour répondre à des questions liées au contenu visuel afin d'aider les robots à accomplir des tâches. De plus, certains chercheurs utilisent VLM pour faciliter l'annotation des données et générer des étiquettes de description pour le contenu visuel.
Bien que le modèle de base ait des capacités de transformation en termes de vision et de traitement du langage, la généralisation et l'ajustement du modèle de base pour les tâches robotiques du monde réel restent assez difficiles.
Ces défis incluent :
1) Manque de données : comment obtenir des données à l'échelle d'Internet pour prendre en charge des tâches telles que le fonctionnement, le positionnement et la navigation du robot, et comment utiliser ces données pour une formation auto-supervisée
2) D'énormes différences : comment gérer la grande diversité d'environnements physiques, de plates-formes physiques de robots et de tâches robotiques potentielles, tout en conservant la généralité requise du modèle sous-jacent
3) Le problème de la quantification de l'incertitude : comment résoudre l'incertitude au niveau de l'instance ; (comme l'ambiguïté du langage ou l'illusion LLM), l'incertitude au niveau de la distribution et les problèmes de changement de distribution, en particulier le problème de changement de distribution causé par le déploiement de robots en boucle fermée.
4) Évaluation de la sécurité : Comment tester rigoureusement le système robot basé sur le modèle de base avant le déploiement, pendant le processus de mise à jour et pendant le processus de travail.
5) Performances en temps réel : Comment gérer le long temps d'inférence de certains modèles de base - qui entravera le déploiement de modèles de base sur les robots, et comment accélérer l'inférence de modèles de base - nécessaire à la décision en ligne - fabrication.
Cet article de synthèse résume l'utilisation actuelle des modèles de base dans le domaine de la robotique. Les chercheurs examinent les méthodes, applications et défis actuels et proposent de futures orientations de recherche pour relever ces défis. Ils ont également souligné les risques potentiels liés à l'utilisation du modèle de base pour atteindre l'autonomie du robot
Connaissance de base du modèle
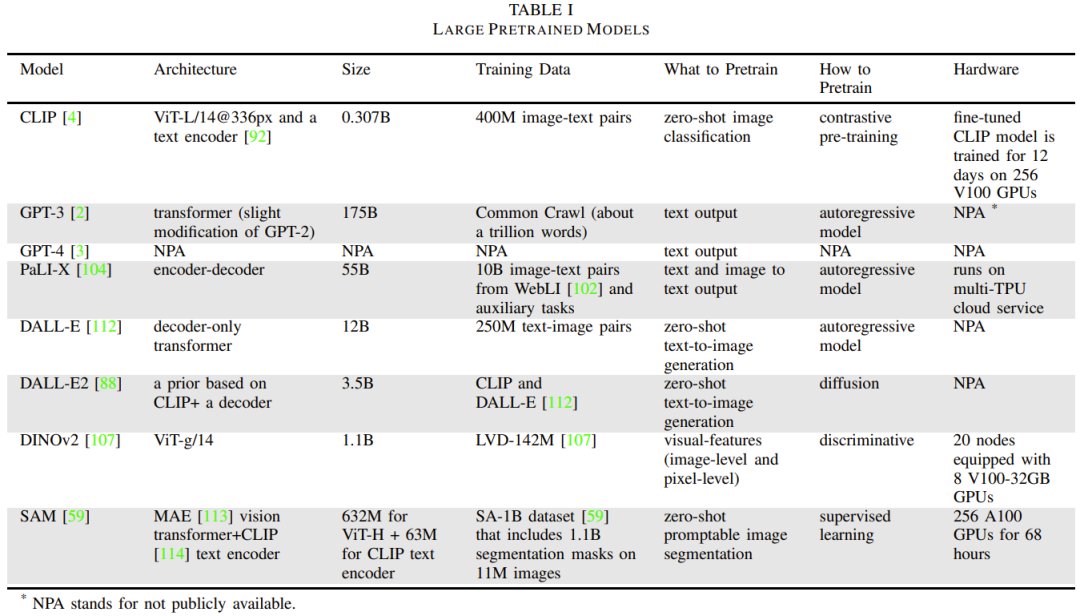
Le modèle de base comporte des milliards de paramètres et est pré-entraîné à l'aide de données à grande échelle au niveau Internet. La formation d’un modèle aussi vaste et complexe coûte très cher. Les coûts d’acquisition, de traitement et de gestion des données peuvent également être élevés. Son processus de formation nécessite une grande quantité de ressources informatiques, nécessite l'utilisation de matériel dédié tel que GPU ou TPU, ainsi que des logiciels et une infrastructure pour la formation des modèles, qui nécessitent tous un investissement financier. De plus, le temps de formation du modèle de base est également très long, ce qui entraîne également des coûts élevés. Par conséquent, ces modèles sont souvent utilisés comme modules enfichables, c'est-à-dire intégrant le modèle de base dans diverses applications sans travail de personnalisation approfondi
Le Tableau 1 donne les détails des modèles de base couramment utilisés.
Cette section se concentrera sur le LLM, le transformateur visuel, le VLM, le modèle de langage multimodal incarné et le modèle génératif visuel. De plus, différentes méthodes de formation utilisées pour former le modèle de base seront également présentées
Ils introduisent d'abord une terminologie et des connaissances mathématiques connexes, qui impliquent la tokenisation, les modèles génératifs, les modèles discriminatifs, l'architecture du transformateur, les modèles autorégressifs, l'encodage automatique masqué, l'apprentissage contrastif. , et les modèles de diffusion.
Ensuite, ils présentent des exemples et le contexte historique des grands modèles linguistiques (LLM). Ensuite, le transformateur visuel, le modèle de langage de vision multimodal (VLM), le modèle de langage multimodal incarné et le modèle de génération visuelle ont été mis en évidence.
Robot Research
Cette section se concentre sur la prise de décision, la planification et le contrôle des robots. Dans ce domaine, les grands modèles de langage (LLM) et les modèles de langage visuel (VLM) peuvent potentiellement être utilisés pour améliorer les capacités des robots. Par exemple, LLM peut faciliter le processus de spécification des tâches afin que les robots puissent recevoir et interpréter des instructions de haut niveau provenant des humains.
VLM devrait également contribuer à ce domaine. VLM excelle dans l'analyse des données visuelles. Pour que les robots puissent prendre des décisions éclairées et effectuer des tâches complexes, la compréhension visuelle est cruciale. Désormais, les robots peuvent utiliser des indices du langage naturel pour améliorer leur capacité à effectuer des tâches liées à la manipulation, à la navigation et à l’interaction.
L'apprentissage des politiques visuo-linguistiques basé sur des objectifs (que ce soit par l'apprentissage par imitation ou par renforcement) devrait être amélioré par le modèle de base. Les modèles linguistiques peuvent également fournir des informations sur les techniques d’apprentissage des politiques. Cette boucle de rétroaction permet d'améliorer continuellement les capacités de prise de décision du robot, car celui-ci peut optimiser ses actions en fonction des commentaires qu'il reçoit du LLM.
Cette section se concentre sur l'application du LLM et du VLM dans le domaine de la prise de décision robotique.
Cette section est divisée en six parties. La première partie présente l'apprentissage politique pour la prise de décision, le contrôle et les robots, y compris l'apprentissage par imitation basé sur le langage et l'apprentissage par renforcement assisté par le langage.
La deuxième partie est l'apprentissage de la valeur de l'image et du langage basé sur des objectifs.
La troisième partie présente l'utilisation de grands modèles de langage pour planifier les tâches des robots, ce qui inclut l'explication des tâches à l'aide d'instructions linguistiques et l'utilisation de modèles de langage pour générer du code pour la planification des tâches.
La quatrième partie est l'apprentissage contextuel (ICL) pour la prise de décision.
Le prochain à présenter est Robot Transformers
La sixième partie est la navigation du robot et le fonctionnement de la bibliothèque de vocabulaire ouverte.
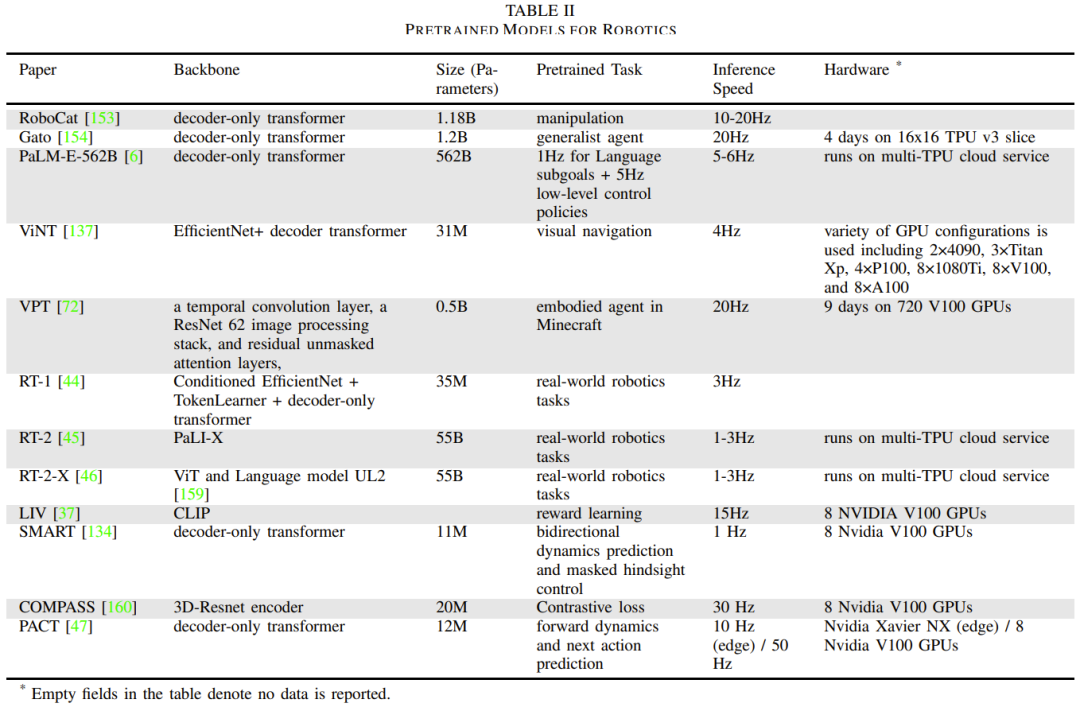
Le tableau 2 donne quelques modèles de base spécifiques aux robots, signalant la taille et l'architecture du modèle, les tâches de pré-formation, le temps d'inférence et la configuration matérielle.
Ce qu'il faut réécrire c'est : la perception
Les robots qui interagissent avec l'environnement reçoivent des informations sensorielles sous différentes modalités, telles que des images, des vidéos, de l'audio et du langage. Ces données de grande dimension sont essentielles pour que les robots comprennent, raisonnent et interagissent dans leur environnement. Les modèles de base peuvent transformer ces entrées de grande dimension en représentations structurées abstraites faciles à interpréter et à manipuler. En particulier, les modèles de base multimodaux permettent aux robots d'intégrer les entrées de différents sens dans une représentation unifiée contenant des informations sémantiques, spatiales, temporelles et d'accessibilité. Ces modèles multimodaux nécessitent des interactions multimodales, nécessitant souvent l'alignement d'éléments de différentes modalités pour garantir la cohérence et la correspondance mutuelle. Par exemple, les tâches de description d'image nécessitent l'alignement des données de texte et d'image.
Cette section se concentrera sur ce que les robots doivent réécrire : une série de tâches liées à la perception, qui peuvent être améliorées en utilisant des modèles de base pour aligner les modalités. L'accent est mis sur la vision et le langage.
Cette section est divisée en cinq parties, la première est la détection de cible et la classification 3D du vocabulaire ouvert, puis la segmentation sémantique du vocabulaire ouvert, puis la scène 3D et la représentation cible du vocabulaire ouvert, et enfin la les moyens appris et enfin les modèles prédictifs.
IA incarnée
Récemment, certaines études ont montré que le LLM peut être utilisé avec succès dans le domaine de l'IA incarnée, où « incarné » fait généralement référence à l'incarnation virtuelle dans le simulateur mondial, plutôt qu'au corps physique du robot.
Des cadres, ensembles de données et modèles intéressants ont émergé dans ce domaine. Il convient de noter en particulier l'utilisation du jeu Minecraft comme plate-forme de formation d'agents incarnés. Par exemple, Voyager utilise GPT-4 pour guider les agents explorant les environnements Minecraft. Il peut interagir avec GPT-4 via une conception d'invite contextuelle sans qu'il soit nécessaire d'affiner les paramètres du modèle de GPT-4.
L'apprentissage par renforcement est une direction de recherche importante dans le domaine de l'apprentissage des robots. Les chercheurs tentent d'utiliser des modèles de base pour concevoir des fonctions de récompense afin d'optimiser l'apprentissage par renforcement
Pour que les robots effectuent une planification de haut niveau, les chercheurs ont exploré l'utilisation de bases. modèles pour vous aider. De plus, certains chercheurs tentent d'appliquer des méthodes de raisonnement et de génération d'actions basées sur une chaîne de pensée à l'intelligence incarnée
Défis et orientations futures
Cette section présentera les défis liés à l'utilisation du modèle de base pour les robots. L’équipe explorera également les futures orientations de recherche susceptibles de relever ces défis.
Le premier défi consiste à surmonter le problème de rareté des données lors de la formation de modèles de base pour les robots, ce qui comprend :
1. Étendre l'apprentissage des robots à l'aide de données de jeu non structurées et de vidéos humaines non étiquetées
2. Utiliser l'inpainting d'images (Inpainting) pour améliorer les données.
3. Surmontez le problème du manque de données 3D lors de la formation de modèles de base 3D
4. Générez des données synthétiques grâce à une simulation haute fidélité
5. Utiliser VLM pour l'augmentation des données est une méthode efficace
6. Les compétences physiques du robot sont limitées par la répartition des compétences
Le deuxième défi est lié aux performances en temps réel, où la clé est le temps d'inférence du modèle de base. .
Le troisième défi concerne les limites de la représentation multimodale.
Le quatrième défi est de savoir comment quantifier l'incertitude à différents niveaux, tels que le niveau de l'instance et le niveau de distribution. Cela implique également le problème de savoir comment calibrer et gérer les changements de distribution.
Le cinquième défi concerne l'évaluation de la sécurité, y compris les tests de sécurité avant le déploiement, la surveillance de l'exécution et la détection des situations de non-distribution.
Le sixième défi consiste à savoir comment choisir : utiliser un modèle de base existant ou construire un nouveau modèle de base pour le robot ?
Le septième défi implique une grande variabilité dans la configuration du robot.
Le huitième défi est de savoir comment évaluer et garantir la reproductibilité dans un environnement robot.
Pour plus de détails sur la recherche, veuillez vous référer à l'article original.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Le robot DeepMind joue au tennis de table, et son coup droit et son revers glissent dans les airs, battant complètement les débutants humains
Aug 09, 2024 pm 04:01 PM
Le robot DeepMind joue au tennis de table, et son coup droit et son revers glissent dans les airs, battant complètement les débutants humains
Aug 09, 2024 pm 04:01 PM
Mais peut-être qu’il ne pourra pas vaincre le vieil homme dans le parc ? Les Jeux Olympiques de Paris battent leur plein et le tennis de table suscite beaucoup d'intérêt. Dans le même temps, les robots ont également réalisé de nouvelles avancées dans le domaine du tennis de table. DeepMind vient tout juste de proposer le premier agent robot apprenant capable d'atteindre le niveau des joueurs amateurs humains de tennis de table de compétition. Adresse papier : https://arxiv.org/pdf/2408.03906 Quelle est la capacité du robot DeepMind à jouer au tennis de table ? Probablement à égalité avec les joueurs amateurs humains : tant en coup droit qu'en revers : l'adversaire utilise une variété de styles de jeu, et le robot peut également résister : recevoir des services avec des tours différents : Cependant, l'intensité du jeu ne semble pas aussi intense que le vieil homme dans le parc. Pour les robots, le tennis de table
 La première griffe mécanique ! Yuanluobao est apparu à la World Robot Conference 2024 et a lancé le premier robot d'échecs pouvant entrer dans la maison
Aug 21, 2024 pm 07:33 PM
La première griffe mécanique ! Yuanluobao est apparu à la World Robot Conference 2024 et a lancé le premier robot d'échecs pouvant entrer dans la maison
Aug 21, 2024 pm 07:33 PM
Le 21 août, la Conférence mondiale sur les robots 2024 s'est tenue en grande pompe à Pékin. La marque de robots domestiques de SenseTime, "Yuanluobot SenseRobot", a dévoilé toute sa famille de produits et a récemment lancé le robot de jeu d'échecs Yuanluobot AI - Chess Professional Edition (ci-après dénommé "Yuanluobot SenseRobot"), devenant ainsi le premier robot d'échecs au monde pour le maison. En tant que troisième produit robot jouant aux échecs de Yuanluobo, le nouveau robot Guoxiang a subi un grand nombre de mises à niveau techniques spéciales et d'innovations en matière d'IA et de machines d'ingénierie. Pour la première fois, il a réalisé la capacité de ramasser des pièces d'échecs en trois dimensions. grâce à des griffes mécaniques sur un robot domestique et effectuer des fonctions homme-machine telles que jouer aux échecs, tout le monde joue aux échecs, réviser la notation, etc.
 Claude aussi est devenu paresseux ! Internaute : apprenez à vous accorder des vacances
Sep 02, 2024 pm 01:56 PM
Claude aussi est devenu paresseux ! Internaute : apprenez à vous accorder des vacances
Sep 02, 2024 pm 01:56 PM
La rentrée scolaire est sur le point de commencer, et ce ne sont pas seulement les étudiants qui sont sur le point de commencer le nouveau semestre qui doivent prendre soin d’eux-mêmes, mais aussi les grands modèles d’IA. Il y a quelque temps, Reddit était rempli d'internautes se plaignant de la paresse de Claude. « Son niveau a beaucoup baissé, il fait souvent des pauses et même la sortie devient très courte. Au cours de la première semaine de sortie, il pouvait traduire un document complet de 4 pages à la fois, mais maintenant il ne peut même plus produire une demi-page. !" https://www.reddit.com/r/ClaudeAI/comments/1by8rw8/something_just_feels_wrong_with_claude_in_the/ dans un post intitulé "Totalement déçu par Claude", plein de
 Lors de la World Robot Conference, ce robot domestique porteur de « l'espoir des futurs soins aux personnes âgées » a été entouré
Aug 22, 2024 pm 10:35 PM
Lors de la World Robot Conference, ce robot domestique porteur de « l'espoir des futurs soins aux personnes âgées » a été entouré
Aug 22, 2024 pm 10:35 PM
Lors de la World Robot Conference qui se tient à Pékin, l'exposition de robots humanoïdes est devenue le centre absolu de la scène. Sur le stand Stardust Intelligent, l'assistant robot IA S1 a réalisé trois performances majeures de dulcimer, d'arts martiaux et de calligraphie. un espace d'exposition, capable à la fois d'arts littéraires et martiaux, a attiré un grand nombre de publics professionnels et de médias. Le jeu élégant sur les cordes élastiques permet au S1 de démontrer un fonctionnement fin et un contrôle absolu avec vitesse, force et précision. CCTV News a réalisé un reportage spécial sur l'apprentissage par imitation et le contrôle intelligent derrière "Calligraphy". Le fondateur de la société, Lai Jie, a expliqué que derrière les mouvements soyeux, le côté matériel recherche le meilleur contrôle de la force et les indicateurs corporels les plus humains (vitesse, charge). etc.), mais du côté de l'IA, les données réelles de mouvement des personnes sont collectées, permettant au robot de devenir plus fort lorsqu'il rencontre une situation forte et d'apprendre à évoluer rapidement. Et agile
 Le matériel IA ajoute un autre membre ! Plutôt que de remplacer les téléphones portables, NotePin peut-il vivre plus longtemps ?
Sep 02, 2024 pm 01:40 PM
Le matériel IA ajoute un autre membre ! Plutôt que de remplacer les téléphones portables, NotePin peut-il vivre plus longtemps ?
Sep 02, 2024 pm 01:40 PM
Jusqu’à présent, aucun produit dans le domaine des appareils portables IA n’a obtenu de résultats particulièrement bons. AIPin, qui a été lancé au MWC24 au début de cette année, une fois le prototype d'évaluation expédié, le « mythe de l'IA » qui était en vogue au moment de sa sortie a commencé à être brisé et a connu des retours à grande échelle en seulement un quelques mois ; RabbitR1, qui s'est également bien vendu au début, était relativement meilleur, mais il a également reçu des critiques négatives similaires aux "boîtiers Android" lorsqu'il a été livré en grande quantité. Maintenant, une autre entreprise est entrée sur la piste des appareils portables IA. Le média technologique TheVerge a publié hier un article de blog indiquant que la startup d'IA Plaud a lancé un produit appelé NotePin. Contrairement à AIFriend, qui en est encore au stade de "peinture", NotePin a maintenant démarré
 L'équipe de Li Feifei a proposé ReKep pour donner aux robots une intelligence spatiale et intégrer GPT-4o
Sep 03, 2024 pm 05:18 PM
L'équipe de Li Feifei a proposé ReKep pour donner aux robots une intelligence spatiale et intégrer GPT-4o
Sep 03, 2024 pm 05:18 PM
Intégration profonde de la vision et de l'apprentissage des robots. Lorsque deux mains de robot travaillent ensemble en douceur pour plier des vêtements, verser du thé et emballer des chaussures, associées au robot humanoïde 1X NEO qui a fait la une des journaux récemment, vous pouvez avoir le sentiment : nous semblons entrer dans l'ère des robots. En fait, ces mouvements soyeux sont le produit d’une technologie robotique avancée + d’une conception de cadre exquise + de grands modèles multimodaux. Nous savons que les robots utiles nécessitent souvent des interactions complexes et exquises avec l’environnement, et que l’environnement peut être représenté comme des contraintes dans les domaines spatial et temporel. Par exemple, si vous souhaitez qu'un robot verse du thé, le robot doit d'abord saisir la poignée de la théière et la maintenir verticalement sans renverser le thé, puis la déplacer doucement jusqu'à ce que l'embouchure de la théière soit alignée avec l'embouchure de la tasse. , puis inclinez la théière selon un certain angle. ce
 Annonce des prix ACL 2024 : l'un des meilleurs articles sur le déchiffrement Oracle par HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Annonce des prix ACL 2024 : l'un des meilleurs articles sur le déchiffrement Oracle par HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Les contributeurs ont beaucoup gagné de cette conférence ACL. L'ACL2024, d'une durée de six jours, se tient à Bangkok, en Thaïlande. ACL est la plus grande conférence internationale dans le domaine de la linguistique informatique et du traitement du langage naturel. Elle est organisée par l'Association internationale pour la linguistique informatique et a lieu chaque année. L'ACL s'est toujours classée première en termes d'influence académique dans le domaine de la PNL, et c'est également une conférence recommandée par le CCF-A. La conférence ACL de cette année est la 62e et a reçu plus de 400 travaux de pointe dans le domaine de la PNL. Hier après-midi, la conférence a annoncé le meilleur article et d'autres récompenses. Cette fois, il y a 7 Best Paper Awards (deux inédits), 1 Best Theme Paper Award et 35 Outstanding Paper Awards. La conférence a également décerné 3 Resource Paper Awards (ResourceAward) et Social Impact Award (
 Hongmeng Smart Travel S9 et conférence de lancement de nouveaux produits avec scénario complet, un certain nombre de nouveaux produits à succès ont été lancés ensemble
Aug 08, 2024 am 07:02 AM
Hongmeng Smart Travel S9 et conférence de lancement de nouveaux produits avec scénario complet, un certain nombre de nouveaux produits à succès ont été lancés ensemble
Aug 08, 2024 am 07:02 AM
Cet après-midi, Hongmeng Zhixing a officiellement accueilli de nouvelles marques et de nouvelles voitures. Le 6 août, Huawei a organisé la conférence de lancement de nouveaux produits Hongmeng Smart Xingxing S9 et Huawei, réunissant la berline phare intelligente panoramique Xiangjie S9, le nouveau M7Pro et Huawei novaFlip, MatePad Pro 12,2 pouces, le nouveau MatePad Air, Huawei Bisheng With de nombreux nouveaux produits intelligents tous scénarios, notamment la série d'imprimantes laser X1, FreeBuds6i, WATCHFIT3 et l'écran intelligent S5Pro, des voyages intelligents, du bureau intelligent aux vêtements intelligents, Huawei continue de construire un écosystème intelligent complet pour offrir aux consommateurs une expérience intelligente du Internet de tout. Hongmeng Zhixing : Autonomisation approfondie pour promouvoir la modernisation de l'industrie automobile intelligente Huawei s'associe à ses partenaires de l'industrie automobile chinoise pour fournir
