
 Périphériques technologiques
IA
Apollo s'associe à Carsim/TruckSim pour une simulation conjointe
Périphériques technologiques
IA
Apollo s'associe à Carsim/TruckSim pour une simulation conjointe
Apollo s'associe à Carsim/TruckSim pour une simulation conjointe

1. Contexte
La simulation joue un rôle important dans la recherche et le développement de la conduite autonome. Elle peut considérablement améliorer l'efficacité de la recherche et du développement et garantir la fiabilité des algorithmes. En tant qu'excellente plate-forme open source, le système Baidu Apollo est très adapté aux recherches d'amis intéressés par l'apprentissage de la conduite autonome. De plus, Carsim/Trucksim est un outil de simulation de dynamique de véhicule classique très respecté.
Cet article présente la méthode de réalisation d'une simulation locale en temps réel grâce à la combinaison d'Apollo et de Trucksim. Il convient aux débutants pour construire une plateforme de simulation et étudier le système Apollo.
2. Conception de l'architecture
Le code de base du projet Apollo est implémenté en C++. Les interfaces courantes pour Trucksim incluent Simulink, Python et le langage C. Cet article présentera d'abord l'architecture de la simulation conjointe Apollo, simulink et Trucksim, et discutera des problèmes existants dans ce système de simulation. Ensuite, nous nous concentrerons sur la simulation conjointe d'Apollo et Trucksim.
2.1 Solutions Apollo, simulink et Trucksim
Simulink et Apollo peuvent communiquer via ROS. Étant donné que le format de données des messages d'Apollo est protobuf et que l'outil ROS de Simulink ne prend en charge que les messages ROS standard (ROS msg), un nœud de conversion de format peut être ajouté à Apollo pour assurer la compatibilité. Concernant la solution de Simulink appelant Trucksim, il existe de nombreuses ressources de référence sur Internet, je n'entrerai donc pas dans les détails.
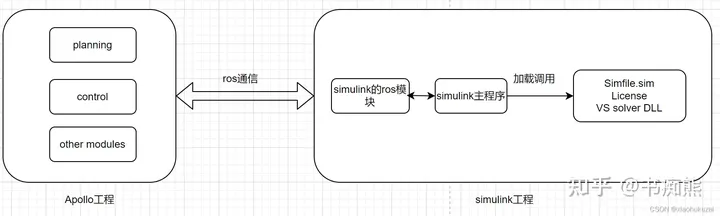
schéma de la solution simulink
2.2 Solutions Apollo, Rosbridge et Trucksim
Établir une communication websocket entre le projet QT et le projet Apollo. Dans le projet Apollo, la conversion mutuelle entre messages ros (ou cyber messages) et websockets est réalisée en ajoutant le module rosbridge (ou cyber_bridge). Le projet QT est implémenté en C++ en tant que client websocket et fait appel à la bibliothèque dynamique de Trucksim pour réaliser la fonction d'exécution de Trucksim en temps réel.
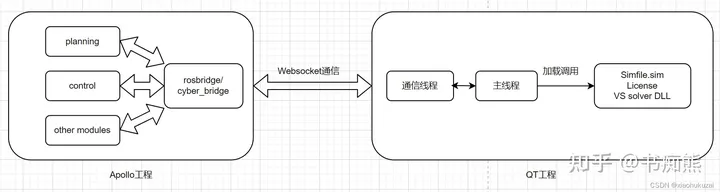
Schéma de la solution Rosbridge
3. Implémentation des fonctions
3.1 Solutions Apollo, Simulink et Trucksim
3.1.1 Configuration Simulink
La boîte à outils Simulink dispose d'un package de support ROS pour configurer le réseau ROS. dans la figure 2. Le nom d'hôte/l'adresse IP et le port sont respectivement l'adresse et le numéro de port de ROS_MASTER_URI, qui sont expliqués dans le mécanisme de communication ci-dessus.
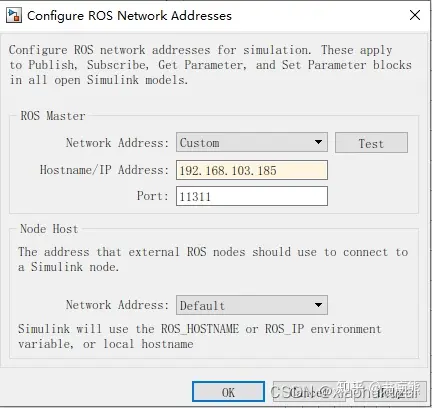
Configurez l'adresse réseau ROS
L'abonné ROS reçoit des messages de l'interface, donc le sujet, le type de message et l'heure d'échantillonnage doivent correspondre au programme dans l'interface.

Configurer l'abonnement à ros
Afin de faciliter le débogage et la vérification, démarrez maintenant ROS côté MATLAB. Le processus de configuration est le suivant :
Instructions de configuration MATLAB :
>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')3.1.2 Configuration de TruckSim
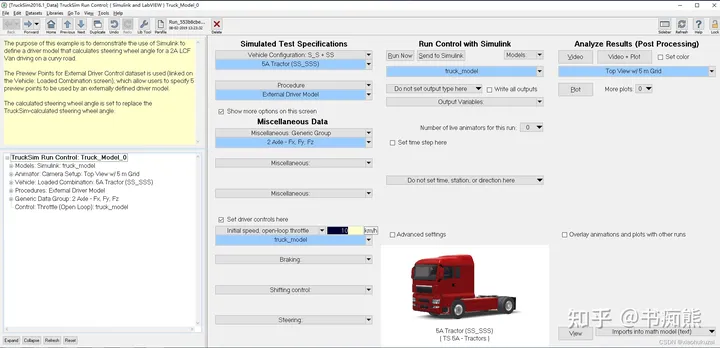
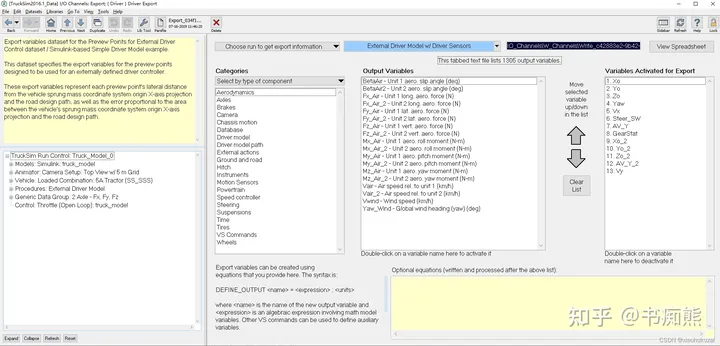
Interface de configuration
Trucksim est une programmation basée sur un assistant, une interface de configuration des paramètres : sélection de camion 5A Tractor (SS_SSS) , voir les paramètres spécifiques Figure 3. Interface de contrôle : Sélectionnez simulink pour Modèles.
Interface principale
Interface de configuration des paramètres d'entrée
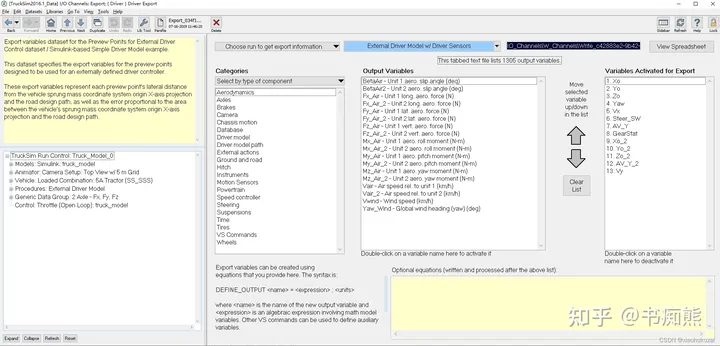
Interface de configuration des paramètres de sortie
3.2 Solutions Apollo, Rosbridge et Trucksim
3.2.1 Configuration de Rosbridge dans Apollo
installation de Rosbridge en ligne Il existe de nombreux tutoriels, je n'entrerai donc pas dans les détails dans cet article.
L'utilisation est la suivante :
cd ros_pkgs_ws
catkin_make
Démarrer rosbridge
source /apollo/ros_pkgs_ws/devel/setup.bash
PATH=/usr/local/miniconda2/bin:$PATH
rosla unch rosbridge_server rosbridge_websocket .launch
3.2.1 Instructions de configuration du projet Qt
3.2.1.1 Informations sur la version de Qt et CMake

3.2.1.3 Définition de l'interface du projet Apollo et du projet QT
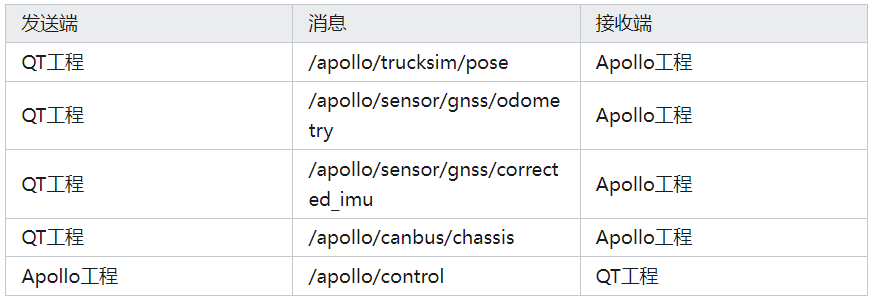
/a pollo/trucksim / pose
{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Recommander plusieurs applications pour acheter des pièces grand public en 2025 dernière version
Apr 21, 2025 pm 11:54 PM
Recommander plusieurs applications pour acheter des pièces grand public en 2025 dernière version
Apr 21, 2025 pm 11:54 PM
Les logiciels d'application qui peuvent acheter des pièces grand public comprennent: 1. Binance, le premier volume de transaction au monde et la vitesse rapide; 2. OKX, produits innovants, frais faibles, haute sécurité; 3. Gate.io, une variété d'actifs et d'options de trading, en se concentrant sur la sécurité; 4. Huobi (HTX), frais faibles, bonne expérience utilisateur; 5. Coinbase, adapté aux novices, haute sécurité; 6. Kraken, sûr et conforme, fournissant une variété de services; 7. Kucoin, frais faibles, adaptés aux commerçants professionnels; 8. Gemini, met l'accent sur la conformité et fournit des services de garde; 9. Crypto.com, offrant une variété d'offres et de services; 10. Bitstamp, un ancien échange, forte liquidité,
 Logiciel essentiel recommandé pour les parties contractuelles en devises
Apr 21, 2025 pm 11:21 PM
Logiciel essentiel recommandé pour les parties contractuelles en devises
Apr 21, 2025 pm 11:21 PM
Les dix principales plates-formes d'échange de contrats de crypto-monnaie en 2025 sont: 1. Binance Futures, 2. Okx Futures, 3. Gate.io, 4. Huobi Futures, 5. Bitmex, 6. Bybit, 7. Deribit, 8. Bitfinex, 9. Coinflex, 10. Phemex, ces plates-formes sont largement reconnues pour leur haute liquidité, diverses fonctions commerciales diversifiées.
 Classement des échanges à effet de levier dans le cercle des devises Les dernières recommandations des dix premiers échanges à effet de levier dans le cercle des devises
Apr 21, 2025 pm 11:24 PM
Classement des échanges à effet de levier dans le cercle des devises Les dernières recommandations des dix premiers échanges à effet de levier dans le cercle des devises
Apr 21, 2025 pm 11:24 PM
Les plates-formes qui ont des performances exceptionnelles dans le commerce, la sécurité et l'expérience utilisateur en effet de levier en 2025 sont: 1. OKX, adaptés aux traders à haute fréquence, fournissant jusqu'à 100 fois l'effet de levier; 2. Binance, adaptée aux commerçants multi-monnaies du monde entier, offrant un effet de levier 125 fois élevé; 3. Gate.io, adapté aux joueurs de dérivés professionnels, fournissant 100 fois l'effet de levier; 4. Bitget, adapté aux novices et aux commerçants sociaux, fournissant jusqu'à 100 fois l'effet de levier; 5. Kraken, adapté aux investisseurs stables, fournissant 5 fois l'effet de levier; 6. BUTBIT, adapté aux explorateurs Altcoin, fournissant 20 fois l'effet de levier; 7. Kucoin, adapté aux commerçants à faible coût, fournissant 10 fois l'effet de levier; 8. Bitfinex, adapté au jeu senior
 Quel bitcoin à terme échange est global?
Apr 21, 2025 pm 11:18 PM
Quel bitcoin à terme échange est global?
Apr 21, 2025 pm 11:18 PM
Les cinq meilleurs classements des échanges à terme Bitcoin sont: 1. CME Group: le plus fiable au monde, attirant les investisseurs institutionnels et se conforment fortement; 2. Coinbase: spécialement pour les investisseurs de détail, fournissant 13 contrats à terme, avec une grande facilité d'utilisation; 3. Binance: effet de levier élevé, bonne liquidité et grand volume d'utilisateurs; 4. OKX: grand volume de trading cumulé, interface professionnelle et gestion complète des risques; 5. Kraken: haute sécurité, adapté au marché européen et aux clients institutionnels.
 OUYI OUYI OUYI OUIX OUYI GLOBAL GOGNAL Station Page d'accueil
Apr 21, 2025 pm 11:57 PM
OUYI OUYI OUYI OUIX OUYI GLOBAL GOGNAL Station Page d'accueil
Apr 21, 2025 pm 11:57 PM
OUYI OKX est la principale plateforme de trading d'actifs numériques au monde. 1) Son historique de développement comprend: il sera lancé en 2017, le nom chinois "Ouyi" sera lancé en 2021, et il sera rebaptisé OUYI OKX en 2022. 2) Les services de base comprennent: les services de trading (Coin, Ledefet, Mining, Dex, Fiat Currency Trading) et les services financiers (Yubibao, Mining, Lending). 3) Les fonctions spéciales de la plate-forme comprennent: les services de données du marché et le système de contrôle des risques. 4) Les avantages de base comprennent: la force technique, le système de sécurité, le support de service et la couverture du marché.
 Coucle de la plate-forme de trading de contrats de cercle de devise 2025
Apr 21, 2025 pm 11:15 PM
Coucle de la plate-forme de trading de contrats de cercle de devise 2025
Apr 21, 2025 pm 11:15 PM
Voici les dix premiers échanges à terme de crypto-monnaie dans le monde: 1. Futures Binance: fournit une multitude de produits contractuels, de frais faibles et de liquidité élevée. 2. OKX: prend en charge plusieurs transactions en devises, en utilisant le cryptage SSL et le stockage du portefeuille froid. 3. Huobi Futures: connu pour sa plate-forme stable et son bon service, il fournit des ressources éducatives. 4. Gate.io: produits contractuels innovants et liquidité élevée, mais FTX a été en faillite. 5. Déribe: concentrez-vous sur les options et les contrats perpétuels, en fournissant des outils de trading professionnels. 6. Coinflex: fournit des contrats à terme en tokenisés et des jetons de gouvernance Flex. 7. Phemex: jusqu'à 100 fois l'effet de levier, les frais de transaction faible et fournit des contrats innovants. 8. B
 Classement d'échange de chaîne quantique Top 10 recommandé (mis à jour en 2025)
Apr 21, 2025 pm 11:48 PM
Classement d'échange de chaîne quantique Top 10 recommandé (mis à jour en 2025)
Apr 21, 2025 pm 11:48 PM
Les chaînes quantiques peuvent être échangées sur les bourses suivantes: 1. Binance: L'une des plus grandes bourses du monde, avec un grand volume de trading, une monnaie riche et une haute sécurité. 2. Sesame Open Door (GATE.IO): un grand échange, offrant une variété de transactions en devises numériques, avec une bonne profondeur de trading. 3. OUYI (OKX): exploité par OK Group, avec une forte résistance complète, un volume de transactions important et des mesures de sécurité complètes. 4. Bitget: Développement rapide, fournit des transactions de chaîne quantique et améliore la sécurité. 5. Bithumb: opéré au Japon, prend en charge les transactions de plusieurs devises virtuelles traditionnelles et est sûre et fiable. 6. Matcha Exchange: un échange bien connu avec une interface amicale et prend en charge le trading de la chaîne quantique. 7. Huobi: un grand échange qui fournit un échange de chaîne quantique,
 Les meilleurs échanges de crypto-monnaie au monde en 2025: les plus grandes recommandations
Apr 21, 2025 pm 10:39 PM
Les meilleurs échanges de crypto-monnaie au monde en 2025: les plus grandes recommandations
Apr 21, 2025 pm 10:39 PM
Les meilleurs échanges de crypto-monnaie au monde en 2025 sont: 1. Binance, 2. Coinbase, 3. Okx, 4. Kraken, 5. Kucoin, 6. Bitget, 7. Bybit, 8. Gemini, 9. Crypto.com, 10. Mexc Matcha Exchange couverture, et convient aux investisseurs ayant des besoins différents.
