
 Périphériques technologiques
IA
Nouvelle solution BEV LV Fusion : Lift-Attend-Splat au-delà de BEVFusion
Périphériques technologiques
IA
Nouvelle solution BEV LV Fusion : Lift-Attend-Splat au-delà de BEVFusion
Nouvelle solution BEV LV Fusion : Lift-Attend-Splat au-delà de BEVFusion

Papier : Méthode Lift-Attend-Splat pour la caméra à vue d'oiseau et la fusion lidar utilisant la technologie Transformer
Veuillez cliquer sur le lien pour afficher le fichier : https://arxiv.org/pdf/2312.14919.pdf
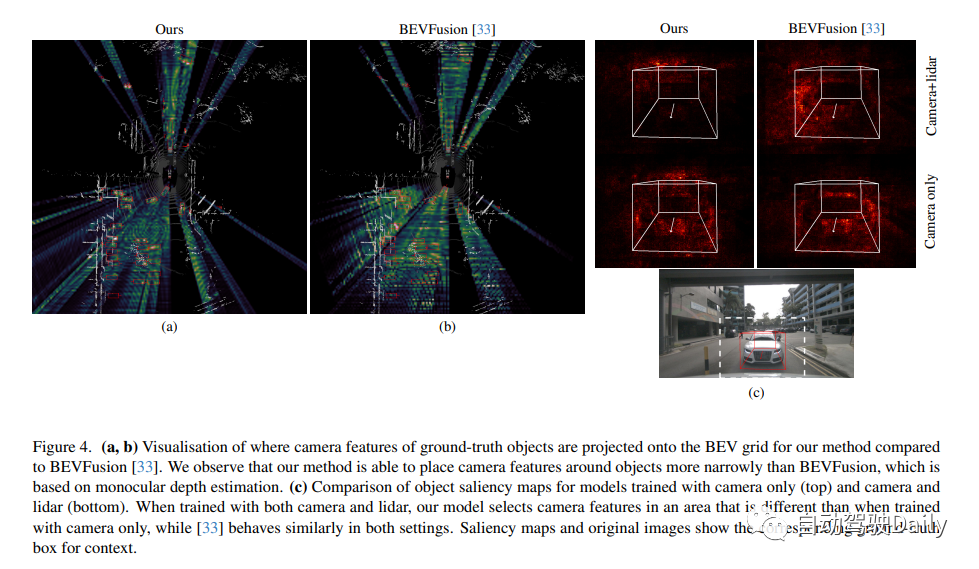
Pour des raisons de sécurité- applications critiques telles que la conduite autonome Il est crucial de combiner des modalités de capteurs complémentaires. Les méthodes récentes de fusion caméra-lidar de conduite autonome utilisent l'estimation de la profondeur monoculaire pour améliorer la perception, mais il s'agit d'une tâche difficile par rapport à l'utilisation directe des informations de profondeur du lidar. Notre étude révèle que cette approche n’exploite pas pleinement les informations de profondeur et démontre qu’améliorer naïvement l’estimation de la profondeur n’améliore pas les performances de détection d’objets. Étonnamment, la suppression complète de l'estimation de la profondeur ne dégrade pas les performances de détection d'objets
Cela suggère que le recours à la profondeur monoculaire peut être un goulot d'étranglement architectural inutile lors de la fusion caméra-lidar. Cette étude propose une nouvelle méthode de fusion qui contourne complètement l’estimation de profondeur monoculaire et utilise à la place un mécanisme d’attention simple pour sélectionner et fusionner les fonctionnalités de caméra et de lidar dans une grille BEV. Les résultats montrent que le modèle proposé est capable d'ajuster son utilisation des fonctionnalités de la caméra en fonction de la disponibilité des fonctionnalités lidar et a de meilleures performances de détection 3D sur l'ensemble de données nuScenes que les modèles de base basés sur l'estimation de la profondeur monoculaire
Introduction à cette étude Une nouvelle caméra -La méthode de fusion lidar appelée "Lift Attented Splat" a été développée. Cette méthode évite l’estimation de la profondeur monoculaire et utilise à la place un simple transformateur pour sélectionner et fusionner les fonctionnalités de caméra et de lidar dans BEV. Les expériences prouvent que par rapport aux méthodes basées sur l'estimation de la profondeur monoculaire, cette méthode de recherche peut mieux utiliser les caméras et améliorer les performances de détection des objets. Les apports de cette étude sont les suivants :
- La méthode de fusion caméra-lidar basée sur le paradigme Lift Splat n'exploite pas la profondeur comme prévu. En particulier, nous montrons qu’ils fonctionnent aussi bien, voire mieux, si la prédiction monoculaire de la profondeur est complètement supprimée.
- Cet article présente une nouvelle méthode de fusion caméra-lidar qui utilise un mécanisme d'attention simple pour fusionner les fonctionnalités de la caméra et du lidar dans un BEV pur. L'article démontre qu'il peut mieux utiliser les caméras et améliorer les performances de détection 3D par rapport aux modèles basés sur le paradigme Lift Splat.
Introduction à la structure principale
La précision de la prédiction de la profondeur est généralement faible. Des analyses qualitatives et quantitatives peuvent être effectuées en comparant la qualité de profondeur prédite par BEVFusion avec des cartes de profondeur lidar en utilisant l'erreur relative absolue (Abs.Rel.) et l'erreur quadratique moyenne (RMSE). Comme le montre la figure 1, la prédiction de profondeur ne reflète pas avec précision la structure de la scène et est significativement différente de la carte de profondeur lidar, ce qui indique que la profondeur monoculaire n'est pas pleinement utilisée comme prévu. L’étude a également révélé que l’amélioration de la prédiction de la profondeur n’améliore pas les performances de détection des objets ! La suppression complète de la prédiction de profondeur n'a aucun impact sur les performances de détection d'objets

Nous proposons une méthode de fusion caméra-lidar qui contourne complètement l'estimation de profondeur monoculaire et utilise à la place un simple transformateur pour fusionner dans une vue à vol d'oiseau les fonctionnalités de la caméra et du lidar. Cependant, en raison du grand nombre de fonctionnalités de caméra et de lidar et de la nature quadratique de l’attention, l’architecture du transformateur est difficile à appliquer simplement au problème de fusion caméra-lidar. Lors de la projection des éléments de la caméra dans BEV, la géométrie du problème peut être utilisée pour limiter considérablement la portée de l'attention, puisque les éléments de la caméra ne doivent contribuer qu'à la position le long de leurs rayons correspondants. Nous appliquons cette idée au cas de la fusion caméra-lidar et introduisons une méthode de fusion simple qui utilise l'attention croisée entre les colonnes du plan de la caméra et les rayons polaires de la grille lidar BEV ! Au lieu de prédire la profondeur monoculaire, l'attention croisée apprend quelles caractéristiques de la caméra sont les plus saillantes dans le contexte fourni par les caractéristiques lidar le long de leurs rayons
Notre modèle a une architecture globale similaire aux méthodes basées sur le paradigme Lift Splat, en plus de projeter les caractéristiques de la caméra. en BEV. Comme le montre la figure ci-dessous, il se compose d'une caméra et d'une structure lidar, d'un module qui génère indépendamment chaque fonctionnalité modale, d'un module de projection et de fusion qui intègre les fonctionnalités de la caméra dans le BEV et les fusionne avec le lidar, et d'une tête de détection. Lors de la détection de cible, le résultat final du modèle correspond aux attributs de la cible dans la scène, y compris les informations de position, de dimension, de direction, de vitesse et de classification, représentés sous la forme d'un cadre de délimitation 3D
Lift Attented Splat camera lidar fusion l'architecture est présentée ci-dessous. (À gauche) Architecture globale : les fonctionnalités de la caméra et du backbone lidar sont fusionnées avant d'être transmises à la tête de détection. (encadré) La géométrie de notre projection 3D : l'étape « Lift » intègre les caractéristiques lidar BEV dans l'horizon projeté en utilisant un échantillonnage bilinéaire pour soulever les caractéristiques lidar le long de la direction z. L'étape « splat » correspond à la transformation inverse, car elle utilise un échantillonnage bilinéaire pour projeter les caractéristiques de l'horizon projeté vers la grille BEV, toujours dans la direction z ! À droite se trouvent les détails du module projet.

Résultats expérimentaux



Lien original : https://mp.weixin.qq.com/s/D7xgvrp8633S2SeUfCRFXQ
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Le modèle MoE open source le plus puissant au monde est ici, avec des capacités chinoises comparables à celles du GPT-4, et le prix ne représente que près d'un pour cent de celui du GPT-4-Turbo.
May 07, 2024 pm 04:13 PM
Le modèle MoE open source le plus puissant au monde est ici, avec des capacités chinoises comparables à celles du GPT-4, et le prix ne représente que près d'un pour cent de celui du GPT-4-Turbo.
May 07, 2024 pm 04:13 PM
Imaginez un modèle d'intelligence artificielle qui non seulement a la capacité de surpasser l'informatique traditionnelle, mais qui permet également d'obtenir des performances plus efficaces à moindre coût. Ce n'est pas de la science-fiction, DeepSeek-V2[1], le modèle MoE open source le plus puissant au monde est ici. DeepSeek-V2 est un puissant mélange de modèle de langage d'experts (MoE) présentant les caractéristiques d'une formation économique et d'une inférence efficace. Il est constitué de 236B paramètres, dont 21B servent à activer chaque marqueur. Par rapport à DeepSeek67B, DeepSeek-V2 offre des performances plus élevées, tout en économisant 42,5 % des coûts de formation, en réduisant le cache KV de 93,3 % et en augmentant le débit de génération maximal à 5,76 fois. DeepSeek est une entreprise explorant l'intelligence artificielle générale
 L'IA bouleverse la recherche mathématique ! Le lauréat de la médaille Fields et mathématicien sino-américain a dirigé 11 articles les mieux classés | Aimé par Terence Tao
Apr 09, 2024 am 11:52 AM
L'IA bouleverse la recherche mathématique ! Le lauréat de la médaille Fields et mathématicien sino-américain a dirigé 11 articles les mieux classés | Aimé par Terence Tao
Apr 09, 2024 am 11:52 AM
L’IA change effectivement les mathématiques. Récemment, Tao Zhexuan, qui a prêté une attention particulière à cette question, a transmis le dernier numéro du « Bulletin de l'American Mathematical Society » (Bulletin de l'American Mathematical Society). En se concentrant sur le thème « Les machines changeront-elles les mathématiques ? », de nombreux mathématiciens ont exprimé leurs opinions. L'ensemble du processus a été plein d'étincelles, intense et passionnant. L'auteur dispose d'une équipe solide, comprenant Akshay Venkatesh, lauréat de la médaille Fields, le mathématicien chinois Zheng Lejun, l'informaticien de l'Université de New York Ernest Davis et de nombreux autres universitaires bien connus du secteur. Le monde de l’IA a radicalement changé. Vous savez, bon nombre de ces articles ont été soumis il y a un an.
 Google est ravi : les performances de JAX surpassent Pytorch et TensorFlow ! Cela pourrait devenir le choix le plus rapide pour la formation à l'inférence GPU
Apr 01, 2024 pm 07:46 PM
Google est ravi : les performances de JAX surpassent Pytorch et TensorFlow ! Cela pourrait devenir le choix le plus rapide pour la formation à l'inférence GPU
Apr 01, 2024 pm 07:46 PM
Les performances de JAX, promu par Google, ont dépassé celles de Pytorch et TensorFlow lors de récents tests de référence, se classant au premier rang sur 7 indicateurs. Et le test n’a pas été fait sur le TPU présentant les meilleures performances JAX. Bien que parmi les développeurs, Pytorch soit toujours plus populaire que Tensorflow. Mais à l’avenir, des modèles plus volumineux seront peut-être formés et exécutés sur la base de la plate-forme JAX. Modèles Récemment, l'équipe Keras a comparé trois backends (TensorFlow, JAX, PyTorch) avec l'implémentation native de PyTorch et Keras2 avec TensorFlow. Premièrement, ils sélectionnent un ensemble de
 Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Bonjour, Atlas électrique ! Le robot Boston Dynamics revient à la vie, des mouvements étranges à 180 degrés effraient Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas entre officiellement dans l’ère des robots électriques ! Hier, l'Atlas hydraulique s'est retiré "en larmes" de la scène de l'histoire. Aujourd'hui, Boston Dynamics a annoncé que l'Atlas électrique était au travail. Il semble que dans le domaine des robots humanoïdes commerciaux, Boston Dynamics soit déterminé à concurrencer Tesla. Après la sortie de la nouvelle vidéo, elle a déjà été visionnée par plus d’un million de personnes en seulement dix heures. Les personnes âgées partent et de nouveaux rôles apparaissent. C'est une nécessité historique. Il ne fait aucun doute que cette année est l’année explosive des robots humanoïdes. Les internautes ont commenté : Les progrès des robots ont fait ressembler la cérémonie d'ouverture de cette année à des êtres humains, et le degré de liberté est bien plus grand que celui des humains. Mais n'est-ce vraiment pas un film d'horreur ? Au début de la vidéo, Atlas est allongé calmement sur le sol, apparemment sur le dos. Ce qui suit est à couper le souffle
 KAN, qui remplace MLP, a été étendu à la convolution par des projets open source
Jun 01, 2024 pm 10:03 PM
KAN, qui remplace MLP, a été étendu à la convolution par des projets open source
Jun 01, 2024 pm 10:03 PM
Plus tôt ce mois-ci, des chercheurs du MIT et d'autres institutions ont proposé une alternative très prometteuse au MLP – KAN. KAN surpasse MLP en termes de précision et d’interprétabilité. Et il peut surpasser le MLP fonctionnant avec un plus grand nombre de paramètres avec un très petit nombre de paramètres. Par exemple, les auteurs ont déclaré avoir utilisé KAN pour reproduire les résultats de DeepMind avec un réseau plus petit et un degré d'automatisation plus élevé. Plus précisément, le MLP de DeepMind compte environ 300 000 paramètres, tandis que le KAN n'en compte qu'environ 200. KAN a une base mathématique solide comme MLP est basé sur le théorème d'approximation universelle, tandis que KAN est basé sur le théorème de représentation de Kolmogorov-Arnold. Comme le montre la figure ci-dessous, KAN a
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
