
 Périphériques technologiques
IA
RoboFusion pour une détection 3D multimodale fiable à l'aide de SAM
Périphériques technologiques
IA
RoboFusion pour une détection 3D multimodale fiable à l'aide de SAM
RoboFusion pour une détection 3D multimodale fiable à l'aide de SAM

Lien papier : https://arxiv.org/pdf/2401.03907.pdf
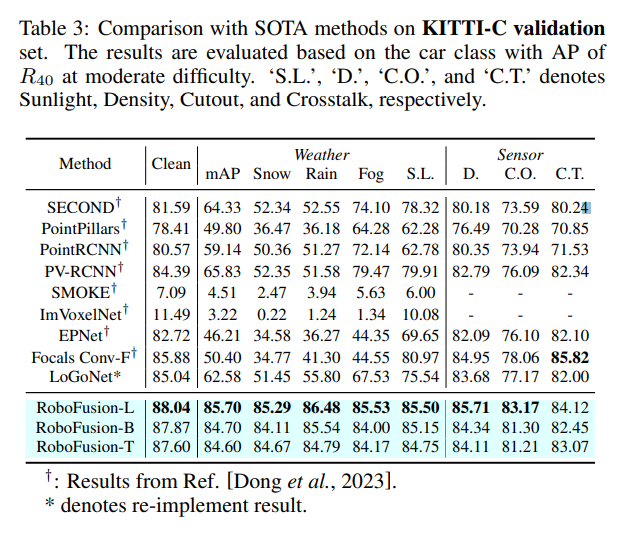
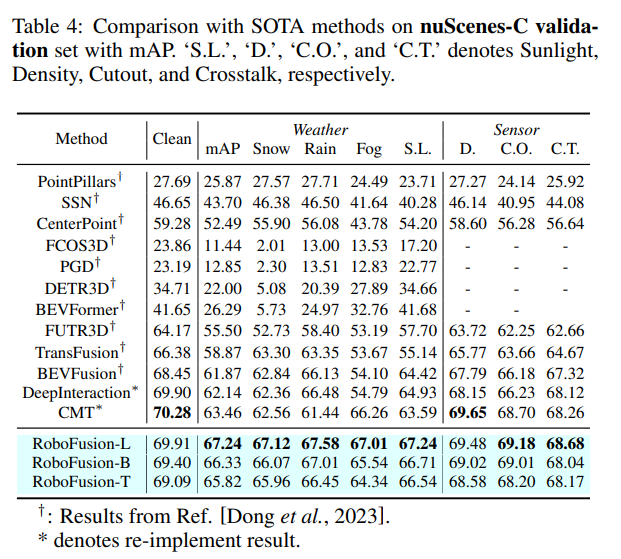
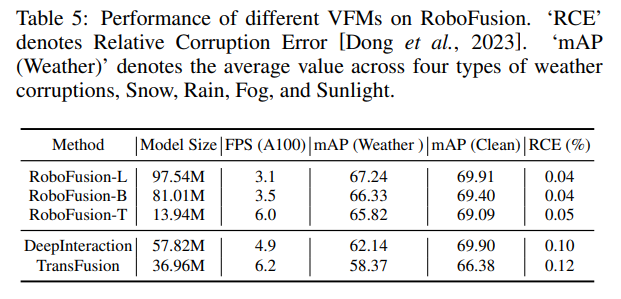
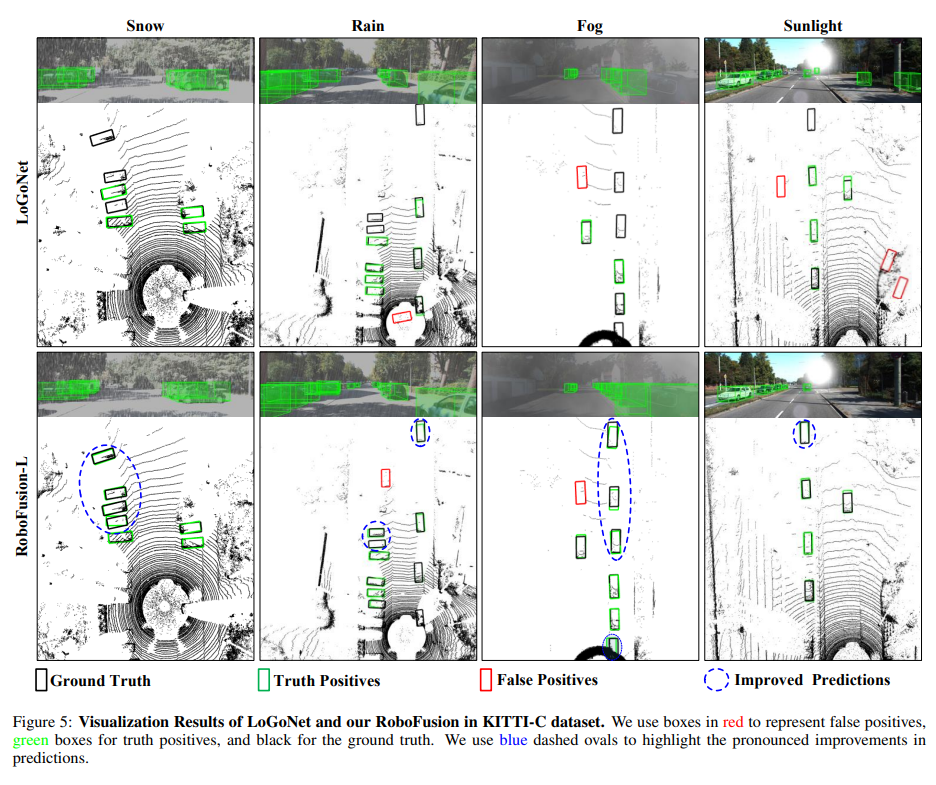
Le détecteur 3D multimodal est conçu pour étudier les systèmes de perception de conduite autonome sûrs et fiables. Bien qu’ils atteignent des performances de pointe sur des ensembles de données de référence propres, la complexité et les conditions difficiles des environnements réels sont souvent ignorées. Dans le même temps, avec l’émergence du Vision Foundation Model (VFM), l’amélioration de la robustesse et des capacités de généralisation de la détection 3D multimodale se heurte à des opportunités et à des défis en matière de conduite autonome. Par conséquent, les auteurs proposent le cadre RoboFusion, qui exploite le VFM comme SAM pour traiter les scénarios de bruit hors distribution (OOD).
Tout d'abord, nous appliquons le SAM original à un scénario de conduite autonome appelé SAM-AD. Pour aligner SAM ou SAMAD avec des méthodes multimodales, nous introduisons AD-FPN pour suréchantillonner les caractéristiques de l'image extraites par SAM. Pour réduire davantage le bruit et les interférences météorologiques, nous utilisons la décomposition en ondelettes pour débruiter les images guidées en profondeur. Enfin, nous utilisons un mécanisme d’auto-attention pour repondérer de manière adaptative les fonctionnalités fusionnées afin d’améliorer les fonctionnalités informatives tout en supprimant l’excès de bruit. RoboFusion améliore la résilience de la détection d'objets 3D multimodale en tirant parti de la généralisation et de la robustesse de VFM pour réduire progressivement le bruit. En conséquence, RoboFusion atteint des performances de pointe dans les scènes bruyantes, selon les résultats des tests KITTIC et nuScenes-C.
L'article propose un cadre robuste appelé RoboFusion, qui utilise VFM comme SAM pour adapter les détecteurs d'objets multimodaux 3D des scènes propres aux scènes bruyantes OOD. Parmi eux, la stratégie d'adaptation de SAM est la clé.
1) Utilisez les fonctionnalités extraites de SAM au lieu de déduire les résultats de segmentation.
2) SAM-AD est proposé, qui est un SAM pré-entraîné pour les scénarios AD.
3) Un nouvel AD-FPN est introduit pour résoudre le problème de suréchantillonnage des fonctionnalités pour l'alignement du VFM avec des détecteurs 3D multimodaux.
Afin de réduire les interférences sonores et de conserver les caractéristiques du signal, le module Deep Guided Wavelet Attention (DGWA) est introduit pour atténuer efficacement le bruit haute et basse fréquence.
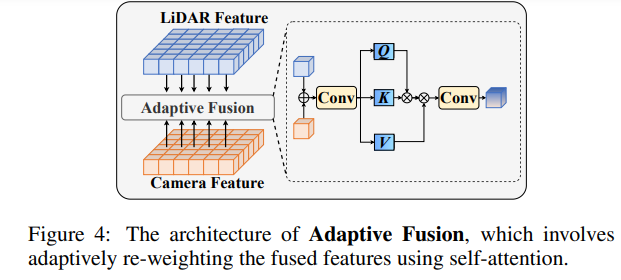
Après avoir fusionné les fonctionnalités de nuage de points et les fonctionnalités d'image, repondérez les fonctionnalités grâce à une fusion adaptative pour améliorer la robustesse et la résistance au bruit des fonctionnalités.
Structure du réseau RoboFusion
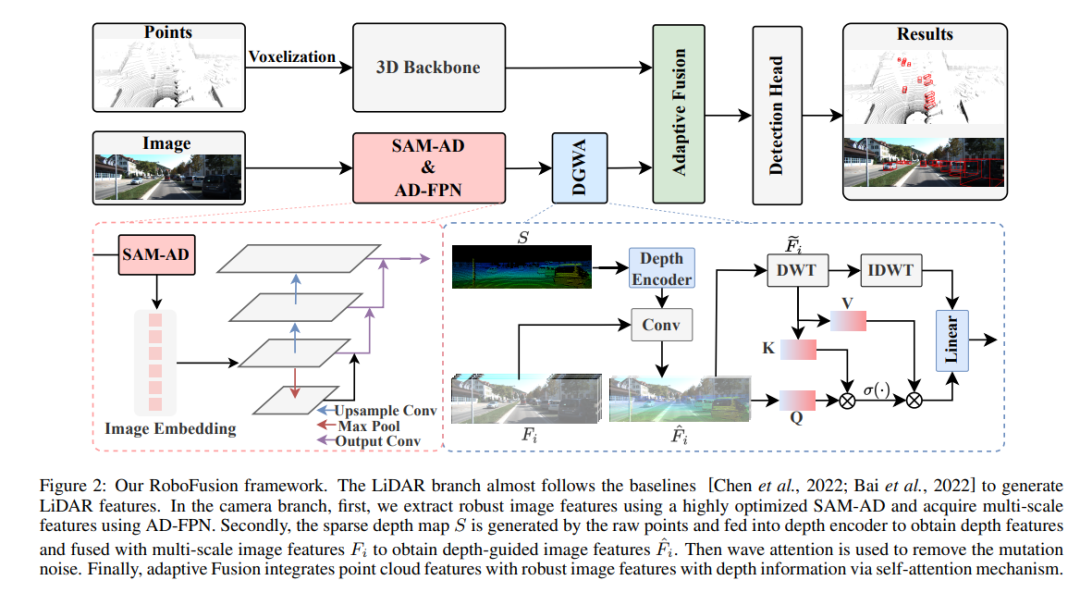
Le framework RoboFusion est présenté ci-dessous et sa branche lidar suit la ligne de base [Chen et al., 2022] pour générer des fonctionnalités lidar. Dans le secteur des caméras, l'algorithme SAM-AD hautement optimisé est d'abord utilisé pour extraire des caractéristiques d'image robustes, puis combiné avec AD-FPN pour obtenir des fonctionnalités multi-échelles. Ensuite, les points d'origine sont utilisés pour générer une carte de profondeur clairsemée S, qui est entrée dans le codeur de profondeur pour obtenir des caractéristiques de profondeur, et est fusionnée avec des caractéristiques d'image multi-échelles pour obtenir des caractéristiques d'image guidées en profondeur. Ensuite, le bruit de mutation est supprimé grâce au mécanisme d’attention fluctuant. Enfin, la fusion adaptative est obtenue grâce à un mécanisme d'auto-attention permettant de combiner des fonctionnalités de nuage de points avec des fonctionnalités d'image robustes avec des informations de profondeur.
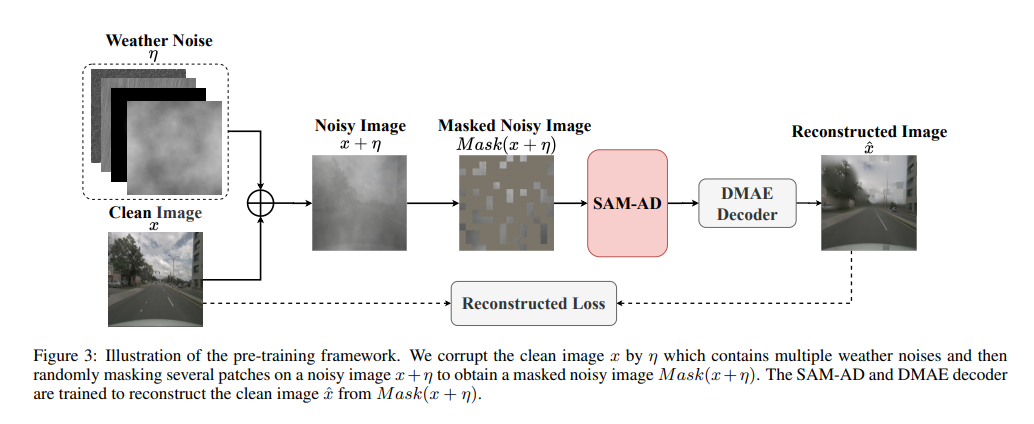
SAM-AD : Afin d'adapter davantage le SAM aux scénarios AD (conduite autonome), SAM est pré-entraîné pour obtenir le SAM-AD. Plus précisément, nous collectons un grand nombre d'échantillons d'images à partir d'ensembles de données matures (c'est-à-dire KITTI et nuScenes) pour former l'ensemble de données AD de base. Après DMAE, SAM est pré-entraîné pour obtenir SAM-AD dans les scénarios AD, comme le montre la figure 3. Désignons x comme l'image propre de l'ensemble de données AD (c'est-à-dire KITTI et nuScenes) et eta comme l'image bruyante générée en fonction de x. Le type et la gravité du bruit ont été sélectionnés au hasard parmi quatre conditions météorologiques (pluie, neige, brouillard et soleil) et cinq niveaux de gravité allant de 1 à 5, respectivement. En utilisant SAM, l'encodeur d'image de MobileSAM comme encodeur, tandis que les pertes du décodeur et de la reconstruction sont les mêmes que celles du DMAE.
AD-FPN. En tant que modèle de segmentation cuable, SAM se compose de trois parties : un encodeur d'image, un encodeur de repère et un décodeur de masque. De manière générale, il faut généraliser l'encodeur d'image pour entraîner le VFM puis entraîner le décodeur. En d’autres termes, l’encodeur d’image peut fournir des intégrations d’images de haute qualité et très robustes aux modèles en aval, tandis que le décodeur de masque est uniquement conçu pour fournir des services de décodage pour la segmentation sémantique. De plus, nous avons besoin de fonctionnalités d’image robustes plutôt que du traitement des informations de repère par l’encodeur de repère. Par conséquent, nous utilisons l’encodeur d’image de SAM pour extraire des caractéristiques d’image robustes. Cependant, SAM utilise la série ViT comme encodeur d'image, ce qui exclut les fonctionnalités multi-échelles et ne fournit que des fonctionnalités basse résolution de haute dimension. Afin de générer les fonctionnalités multi-échelles nécessaires à la détection de cibles, inspiré de [Li et al., 2022a], un AD-FPN est conçu, qui fournit des fonctionnalités multi-échelles basées sur ViT !
Malgré la capacité de SAM-AD ou SAM à extraire des caractéristiques d'image robustes, l'écart entre le domaine 2D et le domaine 3D existe toujours, et les caméras manquant d'informations géométriques dans des environnements endommagés amplifient souvent le bruit et provoquent des problèmes de transfert négatif. Pour atténuer ce problème, nous proposons le module Deep Guided Wavelet Attention (DGWA), qui peut être divisé en deux étapes suivantes. 1) Un réseau de guidage en profondeur est conçu pour ajouter de la géométrie avant les caractéristiques de l'image en combinant les caractéristiques de l'image et les caractéristiques de profondeur des nuages de points. 2) Utilisez la transformation en ondelettes de Haar pour décomposer les caractéristiques de l'image en quatre sous-bandes, puis le mécanisme d'attention permet de débruiter les caractéristiques d'information dans les sous-bandes !
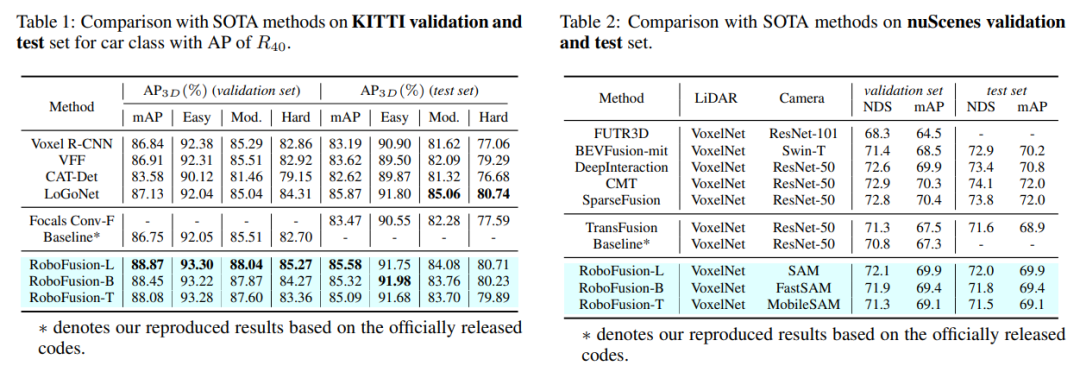
Comparaison expérimentale
 Lien original : https://mp.weixin.qq.com/s/78y 1 KyipHeUSh5sLQZy-ng
Lien original : https://mp.weixin.qq.com/s/78y 1 KyipHeUSh5sLQZy-ng
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment évaluer la rentabilité du support commercial des frameworks Java
Jun 05, 2024 pm 05:25 PM
Comment évaluer la rentabilité du support commercial des frameworks Java
Jun 05, 2024 pm 05:25 PM
L'évaluation du rapport coût/performance du support commercial pour un framework Java implique les étapes suivantes : Déterminer le niveau d'assurance requis et les garanties de l'accord de niveau de service (SLA). L’expérience et l’expertise de l’équipe d’appui à la recherche. Envisagez des services supplémentaires tels que les mises à niveau, le dépannage et l'optimisation des performances. Évaluez les coûts de support commercial par rapport à l’atténuation des risques et à une efficacité accrue.
 Comment la courbe d'apprentissage des frameworks PHP se compare-t-elle à celle d'autres frameworks de langage ?
Jun 06, 2024 pm 12:41 PM
Comment la courbe d'apprentissage des frameworks PHP se compare-t-elle à celle d'autres frameworks de langage ?
Jun 06, 2024 pm 12:41 PM
La courbe d'apprentissage d'un framework PHP dépend de la maîtrise du langage, de la complexité du framework, de la qualité de la documentation et du support de la communauté. La courbe d'apprentissage des frameworks PHP est plus élevée par rapport aux frameworks Python et inférieure par rapport aux frameworks Ruby. Par rapport aux frameworks Java, les frameworks PHP ont une courbe d'apprentissage modérée mais un temps de démarrage plus court.
 Comment les options légères des frameworks PHP affectent-elles les performances des applications ?
Jun 06, 2024 am 10:53 AM
Comment les options légères des frameworks PHP affectent-elles les performances des applications ?
Jun 06, 2024 am 10:53 AM
Le framework PHP léger améliore les performances des applications grâce à une petite taille et une faible consommation de ressources. Ses fonctionnalités incluent : une petite taille, un démarrage rapide, une faible utilisation de la mémoire, une vitesse de réponse et un débit améliorés et une consommation de ressources réduite. Cas pratique : SlimFramework crée une API REST, seulement 500 Ko, une réactivité élevée et un débit élevé.
 RedMagic Tablet 3D Explorer Edition propose un affichage 3D sans lunettes
Sep 06, 2024 am 06:45 AM
RedMagic Tablet 3D Explorer Edition propose un affichage 3D sans lunettes
Sep 06, 2024 am 06:45 AM
La RedMagic Tablet 3D Explorer Edition a été lancée aux côtés de la Gaming Tablet Pro. Cependant, alors que ce dernier est davantage destiné aux joueurs, le premier est davantage destiné au divertissement. La nouvelle tablette Android est dotée de ce que l'entreprise appelle une « 3D à l'oeil nu ».
 Bonnes pratiques en matière de documentation du framework Golang
Jun 04, 2024 pm 05:00 PM
Bonnes pratiques en matière de documentation du framework Golang
Jun 04, 2024 pm 05:00 PM
La rédaction d'une documentation claire et complète est cruciale pour le framework Golang. Les meilleures pratiques incluent le respect d'un style de documentation établi, tel que le Go Coding Style Guide de Google. Utilisez une structure organisationnelle claire, comprenant des titres, des sous-titres et des listes, et fournissez la navigation. Fournit des informations complètes et précises, notamment des guides de démarrage, des références API et des concepts. Utilisez des exemples de code pour illustrer les concepts et l'utilisation. Maintenez la documentation à jour, suivez les modifications et documentez les nouvelles fonctionnalités. Fournir une assistance et des ressources communautaires telles que des problèmes et des forums GitHub. Créez des exemples pratiques, tels que la documentation API.
 Comment choisir le meilleur framework Golang pour différents scénarios d'application
Jun 05, 2024 pm 04:05 PM
Comment choisir le meilleur framework Golang pour différents scénarios d'application
Jun 05, 2024 pm 04:05 PM
Choisissez le meilleur framework Go en fonction des scénarios d'application : tenez compte du type d'application, des fonctionnalités du langage, des exigences de performances et de l'écosystème. Frameworks Go courants : Gin (application Web), Echo (service Web), Fibre (haut débit), gorm (ORM), fasthttp (vitesse). Cas pratique : construction de l'API REST (Fiber) et interaction avec la base de données (gorm). Choisissez un framework : choisissez fasthttp pour les performances clés, Gin/Echo pour les applications Web flexibles et gorm pour l'interaction avec la base de données.
 Explication pratique détaillée du développement du framework Golang : questions et réponses
Jun 06, 2024 am 10:57 AM
Explication pratique détaillée du développement du framework Golang : questions et réponses
Jun 06, 2024 am 10:57 AM
Dans le développement du framework Go, les défis courants et leurs solutions sont les suivants : Gestion des erreurs : utilisez le package d'erreurs pour la gestion et utilisez un middleware pour gérer les erreurs de manière centralisée. Authentification et autorisation : intégrez des bibliothèques tierces et créez un middleware personnalisé pour vérifier les informations d'identification. Traitement simultané : utilisez des goroutines, des mutex et des canaux pour contrôler l'accès aux ressources. Tests unitaires : utilisez les packages, les simulations et les stubs gotest pour l'isolation, ainsi que les outils de couverture de code pour garantir la suffisance. Déploiement et surveillance : utilisez les conteneurs Docker pour regrouper les déploiements, configurer les sauvegardes de données et suivre les performances et les erreurs avec des outils de journalisation et de surveillance.
 Quels sont les malentendus courants dans le processus d'apprentissage du framework Golang ?
Jun 05, 2024 pm 09:59 PM
Quels sont les malentendus courants dans le processus d'apprentissage du framework Golang ?
Jun 05, 2024 pm 09:59 PM
Il existe cinq malentendus dans l'apprentissage du framework Go : une dépendance excessive à l'égard du framework et une flexibilité limitée. Si vous ne respectez pas les conventions du framework, le code sera difficile à maintenir. L'utilisation de bibliothèques obsolètes peut entraîner des problèmes de sécurité et de compatibilité. L'utilisation excessive de packages obscurcit la structure du code. Ignorer la gestion des erreurs entraîne un comportement inattendu et des plantages.
