

Google formule un nouveau « Code Robot » pour garantir que les films de science-fiction ne se réaliseront pas
L'équipe de robotique DeepMind a récemment annoncé trois nouveaux développements visant à aider les robots à prendre des décisions plus rapides, meilleures et plus sûres en dehors du laboratoire. D'une part, ils ont développé un système qui collecte des données de formation via des « codes robotiques » pour garantir qu'un assistant de bureau robotique puisse récupérer plus de papier d'imprimante pour les utilisateurs, tout en évitant d'attaquer les collègues humains qui se trouvent sur leur chemin. Ce développement améliorera encore l’efficacité et la sécurité des robots.

AutoRT, le système de collecte de données de Google, utilise des modèles de langage visuel (VLM) et des modèles de langage étendus (LLM) travaillant ensemble pour comprendre l'environnement, s'adapter à des situations inconnues et décider des tâches appropriées. La conception de ce système s'inspire des « Trois lois de la robotique » d'Asimov, qui sont décrites comme un ensemble de directives axées sur la sécurité pour garantir que l'IA évite de faire des choix impliquant des humains, des animaux, des objets pointus et même des appareils électriques lorsqu'elle est utilisée. tâche d’exploitation des robots.
Afin d'améliorer la sécurité, DeepMind a programmé le robot pour qu'il s'arrête automatiquement de fonctionner dès que ses articulations reçoivent une force excessive. De plus, le robot est équipé d’un coupe-circuit physique qui permet à un opérateur humain d’arrêter immédiatement le robot. Google a déployé une flotte de 53 robots AutoRT dans quatre immeubles de bureaux différents pendant sept mois et a mené plus de 77 000 essais. Certains robots sont contrôlés à distance par des opérateurs humains, tandis que d’autres fonctionnent de manière totalement autonome sur la base de scripts ou du modèle d’apprentissage de l’IA Robot Transformer (RT-2) de Google. De telles mesures de sécurité et conception expérimentale garantissent la sécurité et la contrôlabilité du robot.
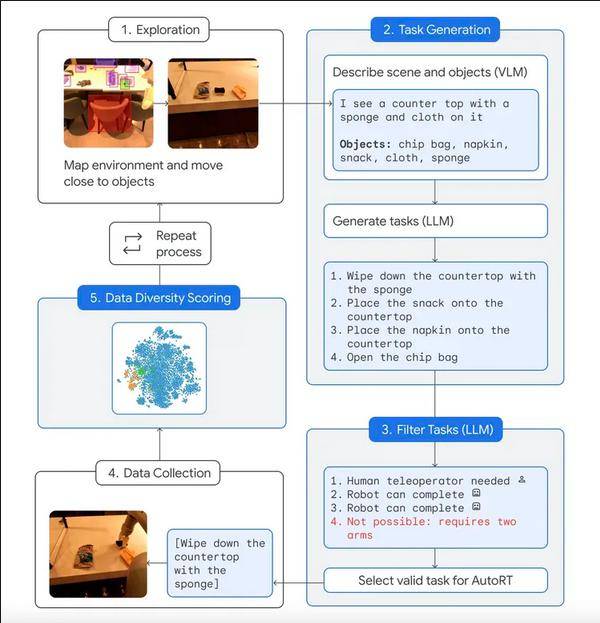
Le robot utilisé dans l'expérience était principalement orienté vers l'aspect pratique et était équipé d'une caméra, d'un bras robotique et d'une base mobile. Chaque robot utilise VLM (AI Visual Language Module) pour percevoir l'environnement et reconnaître les objets. Ensuite, LLM (AI Large Language Module) fournira des suggestions pour une série de tâches créatives, telles que « mettre des collations sur le comptoir », et agira en tant que décideur pour sélectionner les tâches appropriées que le robot devra effectuer. Cette conception du système peut améliorer le niveau d’intelligence du robot et lui permettre de mieux s’adapter aux différentes exigences des tâches.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Cache mybatis de premier niveau et cache de deuxième niveau
Cache mybatis de premier niveau et cache de deuxième niveau
 Que faire si votre adresse IP est attaquée
Que faire si votre adresse IP est attaquée
 Solution au problème selon lequel l'entrée n'est pas prise en charge au démarrage de l'ordinateur
Solution au problème selon lequel l'entrée n'est pas prise en charge au démarrage de l'ordinateur
 Quelle est la balise article utilisée pour définir ?
Quelle est la balise article utilisée pour définir ?
 Introduction aux fonctions d'entrée en langage C
Introduction aux fonctions d'entrée en langage C
 Comment utiliser la fonction de classement
Comment utiliser la fonction de classement
 Win10 suspend les mises à jour
Win10 suspend les mises à jour
 Comment définir la largeur du jeu de champs
Comment définir la largeur du jeu de champs
 Explication détaillée de setinterval
Explication détaillée de setinterval








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



