
 Périphériques technologiques
IA
CMUÐ réalise une percée : le chien robot a une pleine valeur d'agilité, peut franchir des obstacles à très grande vitesse et a à la fois vitesse et sécurité !
Périphériques technologiques
IA
CMUÐ réalise une percée : le chien robot a une pleine valeur d'agilité, peut franchir des obstacles à très grande vitesse et a à la fois vitesse et sécurité !
CMUÐ réalise une percée : le chien robot a une pleine valeur d'agilité, peut franchir des obstacles à très grande vitesse et a à la fois vitesse et sécurité !

Les équipes de la CMU et de l'ETH Zurich ont collaboré pour développer un nouveau framework appelé "Agile But Safe" (ABS), qui fournit une solution permettant aux robots quadrupèdes d'effectuer des mouvements à grande vitesse dans des environnements complexes. Le cadre fait non seulement preuve d'une grande efficacité pour éviter les collisions, mais atteint également une vitesse sans précédent de 3,1 millisecondes. Cette innovation apporte de nouveaux progrès dans le domaine des robots à pattes.
Dans le domaine du mouvement des robots à grande vitesse, maintenir à la fois vitesse et sécurité a toujours été un énorme défi. Cependant, une équipe de recherche de l’Université Carnegie Mellon (CMU) et de l’ETH Zurich (ETH) a récemment réalisé une percée. Le nouvel algorithme de robot quadrupède qu'ils ont développé peut non seulement se déplacer rapidement dans des environnements complexes, mais également éviter habilement les obstacles, atteignant ainsi véritablement l'objectif « d'agilité et de sécurité ». L’innovation de cet algorithme réside dans sa capacité à identifier et analyser rapidement l’environnement et à prendre des décisions intelligentes basées sur des données en temps réel. Grâce à des capteurs avancés et à une puissance de calcul puissante, le robot est capable de détecter avec précision les obstacles autour de lui et de les éviter en ajustant sa démarche et sa trajectoire. L'application réussie de cette technologie favorisera grandement le développement de robots à grande vitesse

Adresse papier : https://arxiv.org/pdf/2401.17583.pdf
Avec le soutien de l'ABS, le chien robot peut effectuer dans divers scénarios Tous ont démontré d'étonnantes capacités d'évitement d'obstacles à grande vitesse :
Couloirs étroits remplis d'obstacles :

Scènes intérieures désordonnées :
Qu'il s'agisse d'herbe ou d'extérieur, d'obstacles statiques ou dynamiques, le robot le chien peut les gérer calmement :

Lorsqu'il rencontre une poussette, le chien robot esquive adroitement :
Les panneaux d'avertissement, les boîtes et les chaises ne sont pas non plus un problème :
Il peut aussi facilement s'en occuper avec l'apparition soudaine de tapis et de pieds humains Bypass :

Le chien robot peut même jouer à l'aigle et attraper des poulets :
ABS Technologie révolutionnaire :
RL+ Apprentissage sans modèle de la valeur Reach-Avoid
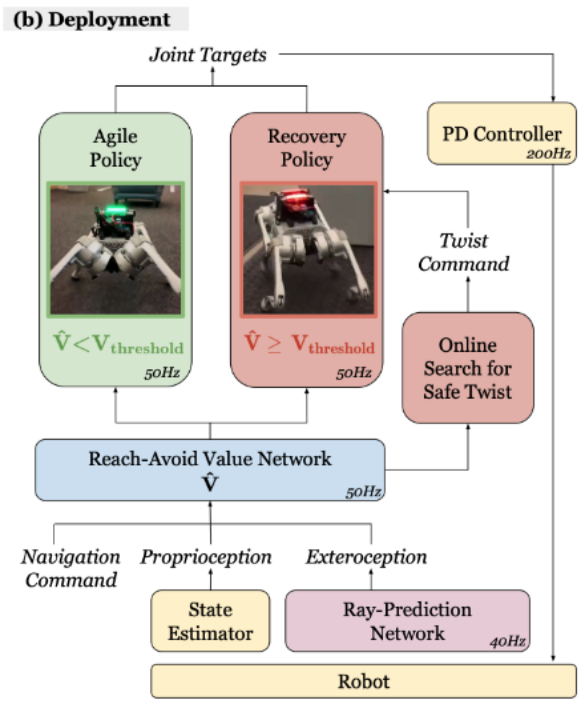
ABS utilise un paramètre de politique double (Dual Policy), comprenant une « Politique Agile » (Politique Agile) et une « Politique de récupération » (Politique de récupération). La stratégie Agile permet au robot de se déplacer rapidement à travers des environnements d'obstacles, tandis que la stratégie de récupération intervient pour assurer la sécurité du robot une fois que l'estimation de la valeur Atteindre-Éviter détecte un danger potentiel (comme l'apparition soudaine d'une poussette).
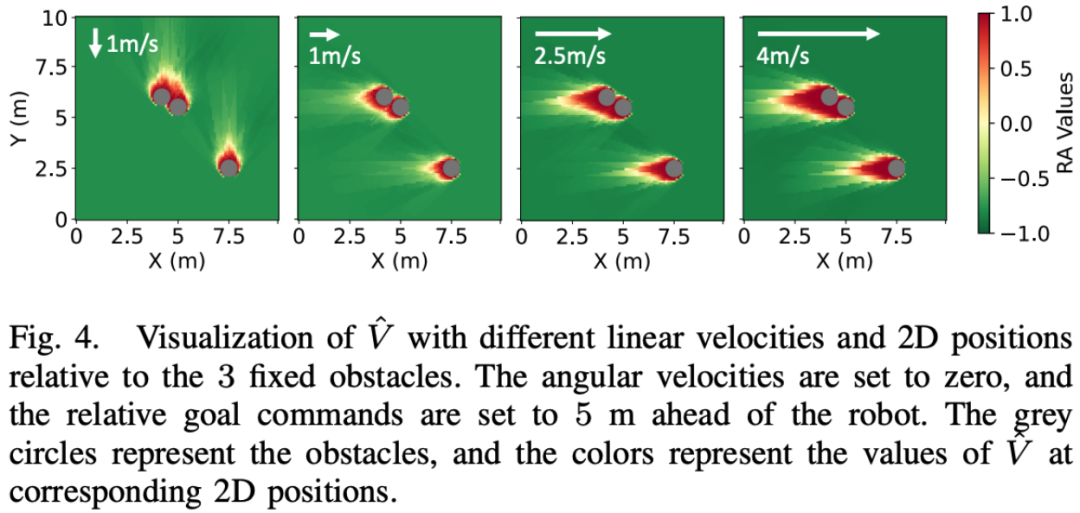
La figure ci-dessous montre la valeur RA (reach defense) apprise pour un ensemble spécifique d'obstacles. À mesure que la vitesse du robot change, le paysage de distribution des valeurs RA change en conséquence. Le signe de la valeur RA est une indication raisonnable de la sécurité de la stratégie agile. En d’autres termes, ce graphique montre le risque de sécurité du robot face à des obstacles spécifiques à différentes vitesses à travers différentes valeurs RA. Les changements élevés et faibles de la valeur RA reflètent les risques de sécurité que le robot peut rencontrer lors de l'exécution de stratégies agiles dans différents états.
L'innovation de la stratégie de récupération est qu'elle permet au robot quadrupède de suivre rapidement les instructions de vitesse linéaire et de vitesse angulaire en guise de sauvegarde stratégies de conservation. Contrairement à la stratégie agile, l’espace d’observation de la stratégie de récupération se concentre sur le suivi des commandes de vitesse linéaire et de vitesse angulaire et ne nécessite pas d’informations sensorielles externes. Les récompenses de mission de la stratégie de récupération se concentrent sur le suivi de la vitesse linéaire, le suivi de la vitesse angulaire, le maintien en vie et le maintien de la posture pour permettre un retour en douceur à la stratégie d'agilité. La formation à cette stratégie est également effectuée dans un environnement de simulation, mais avec une randomisation de domaine spécifique et des paramètres de programme pour mieux s'adapter aux conditions susceptibles de déclencher la stratégie de récupération. Cette approche permet aux robots quadrupèdes de réagir rapidement aux pannes potentielles lors de mouvements à grande vitesse.
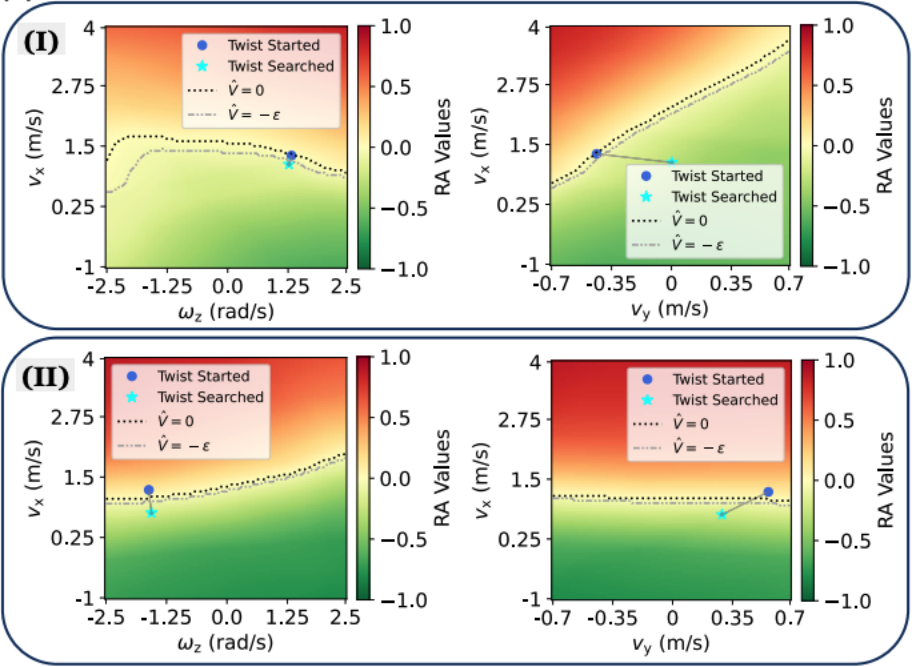
La figure ci-dessous montre une représentation visuelle du paysage des valeurs RA lorsque la stratégie de redressement est déclenchée dans deux situations spécifiques (I et II). Ces visualisations sont effectuées dans les plans vx (vitesse le long de l'axe x) par rapport à ωz (vitesse angulaire autour de l'axe z) et vx par rapport à vy (vitesse le long de l'axe y). La figure montre l'état de rotation initial avant la recherche (c'est-à-dire l'état de rotation actuel de la base du robot) et les commandes obtenues grâce à la recherche. En termes simples, ces graphiques montrent les instructions de mouvement optimales obtenues grâce à la recherche de stratégie de récupération dans des conditions spécifiques, et comment ces instructions affectent la valeur RA, reflétant ainsi la sécurité du robot dans différents états de mouvement.

Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Le robot DeepMind joue au tennis de table, et son coup droit et son revers glissent dans les airs, battant complètement les débutants humains
Aug 09, 2024 pm 04:01 PM
Le robot DeepMind joue au tennis de table, et son coup droit et son revers glissent dans les airs, battant complètement les débutants humains
Aug 09, 2024 pm 04:01 PM
Mais peut-être qu’il ne pourra pas vaincre le vieil homme dans le parc ? Les Jeux Olympiques de Paris battent leur plein et le tennis de table suscite beaucoup d'intérêt. Dans le même temps, les robots ont également réalisé de nouvelles avancées dans le domaine du tennis de table. DeepMind vient tout juste de proposer le premier agent robot apprenant capable d'atteindre le niveau des joueurs amateurs humains de tennis de table de compétition. Adresse papier : https://arxiv.org/pdf/2408.03906 Quelle est la capacité du robot DeepMind à jouer au tennis de table ? Probablement à égalité avec les joueurs amateurs humains : tant en coup droit qu'en revers : l'adversaire utilise une variété de styles de jeu, et le robot peut également résister : recevoir des services avec des tours différents : Cependant, l'intensité du jeu ne semble pas aussi intense que le vieil homme dans le parc. Pour les robots, le tennis de table
 La première griffe mécanique ! Yuanluobao est apparu à la World Robot Conference 2024 et a lancé le premier robot d'échecs pouvant entrer dans la maison
Aug 21, 2024 pm 07:33 PM
La première griffe mécanique ! Yuanluobao est apparu à la World Robot Conference 2024 et a lancé le premier robot d'échecs pouvant entrer dans la maison
Aug 21, 2024 pm 07:33 PM
Le 21 août, la Conférence mondiale sur les robots 2024 s'est tenue en grande pompe à Pékin. La marque de robots domestiques de SenseTime, "Yuanluobot SenseRobot", a dévoilé toute sa famille de produits et a récemment lancé le robot de jeu d'échecs Yuanluobot AI - Chess Professional Edition (ci-après dénommé "Yuanluobot SenseRobot"), devenant ainsi le premier robot d'échecs au monde pour le maison. En tant que troisième produit robot jouant aux échecs de Yuanluobo, le nouveau robot Guoxiang a subi un grand nombre de mises à niveau techniques spéciales et d'innovations en matière d'IA et de machines d'ingénierie. Pour la première fois, il a réalisé la capacité de ramasser des pièces d'échecs en trois dimensions. grâce à des griffes mécaniques sur un robot domestique et effectuer des fonctions homme-machine telles que jouer aux échecs, tout le monde joue aux échecs, réviser la notation, etc.
 Claude aussi est devenu paresseux ! Internaute : apprenez à vous accorder des vacances
Sep 02, 2024 pm 01:56 PM
Claude aussi est devenu paresseux ! Internaute : apprenez à vous accorder des vacances
Sep 02, 2024 pm 01:56 PM
La rentrée scolaire est sur le point de commencer, et ce ne sont pas seulement les étudiants qui sont sur le point de commencer le nouveau semestre qui doivent prendre soin d’eux-mêmes, mais aussi les grands modèles d’IA. Il y a quelque temps, Reddit était rempli d'internautes se plaignant de la paresse de Claude. « Son niveau a beaucoup baissé, il fait souvent des pauses et même la sortie devient très courte. Au cours de la première semaine de sortie, il pouvait traduire un document complet de 4 pages à la fois, mais maintenant il ne peut même plus produire une demi-page. !" https://www.reddit.com/r/ClaudeAI/comments/1by8rw8/something_just_feels_wrong_with_claude_in_the/ dans un post intitulé "Totalement déçu par Claude", plein de
 Lors de la World Robot Conference, ce robot domestique porteur de « l'espoir des futurs soins aux personnes âgées » a été entouré
Aug 22, 2024 pm 10:35 PM
Lors de la World Robot Conference, ce robot domestique porteur de « l'espoir des futurs soins aux personnes âgées » a été entouré
Aug 22, 2024 pm 10:35 PM
Lors de la World Robot Conference qui se tient à Pékin, l'exposition de robots humanoïdes est devenue le centre absolu de la scène. Sur le stand Stardust Intelligent, l'assistant robot IA S1 a réalisé trois performances majeures de dulcimer, d'arts martiaux et de calligraphie. un espace d'exposition, capable à la fois d'arts littéraires et martiaux, a attiré un grand nombre de publics professionnels et de médias. Le jeu élégant sur les cordes élastiques permet au S1 de démontrer un fonctionnement fin et un contrôle absolu avec vitesse, force et précision. CCTV News a réalisé un reportage spécial sur l'apprentissage par imitation et le contrôle intelligent derrière "Calligraphy". Le fondateur de la société, Lai Jie, a expliqué que derrière les mouvements soyeux, le côté matériel recherche le meilleur contrôle de la force et les indicateurs corporels les plus humains (vitesse, charge). etc.), mais du côté de l'IA, les données réelles de mouvement des personnes sont collectées, permettant au robot de devenir plus fort lorsqu'il rencontre une situation forte et d'apprendre à évoluer rapidement. Et agile
 Annonce des prix ACL 2024 : l'un des meilleurs articles sur le déchiffrement Oracle par HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Annonce des prix ACL 2024 : l'un des meilleurs articles sur le déchiffrement Oracle par HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Les contributeurs ont beaucoup gagné de cette conférence ACL. L'ACL2024, d'une durée de six jours, se tient à Bangkok, en Thaïlande. ACL est la plus grande conférence internationale dans le domaine de la linguistique informatique et du traitement du langage naturel. Elle est organisée par l'Association internationale pour la linguistique informatique et a lieu chaque année. L'ACL s'est toujours classée première en termes d'influence académique dans le domaine de la PNL, et c'est également une conférence recommandée par le CCF-A. La conférence ACL de cette année est la 62e et a reçu plus de 400 travaux de pointe dans le domaine de la PNL. Hier après-midi, la conférence a annoncé le meilleur article et d'autres récompenses. Cette fois, il y a 7 Best Paper Awards (deux inédits), 1 Best Theme Paper Award et 35 Outstanding Paper Awards. La conférence a également décerné 3 Resource Paper Awards (ResourceAward) et Social Impact Award (
 Hongmeng Smart Travel S9 et conférence de lancement de nouveaux produits avec scénario complet, un certain nombre de nouveaux produits à succès ont été lancés ensemble
Aug 08, 2024 am 07:02 AM
Hongmeng Smart Travel S9 et conférence de lancement de nouveaux produits avec scénario complet, un certain nombre de nouveaux produits à succès ont été lancés ensemble
Aug 08, 2024 am 07:02 AM
Cet après-midi, Hongmeng Zhixing a officiellement accueilli de nouvelles marques et de nouvelles voitures. Le 6 août, Huawei a organisé la conférence de lancement de nouveaux produits Hongmeng Smart Xingxing S9 et Huawei, réunissant la berline phare intelligente panoramique Xiangjie S9, le nouveau M7Pro et Huawei novaFlip, MatePad Pro 12,2 pouces, le nouveau MatePad Air, Huawei Bisheng With de nombreux nouveaux produits intelligents tous scénarios, notamment la série d'imprimantes laser X1, FreeBuds6i, WATCHFIT3 et l'écran intelligent S5Pro, des voyages intelligents, du bureau intelligent aux vêtements intelligents, Huawei continue de construire un écosystème intelligent complet pour offrir aux consommateurs une expérience intelligente du Internet de tout. Hongmeng Zhixing : Autonomisation approfondie pour promouvoir la modernisation de l'industrie automobile intelligente Huawei s'associe à ses partenaires de l'industrie automobile chinoise pour fournir
 L'équipe de Li Feifei a proposé ReKep pour donner aux robots une intelligence spatiale et intégrer GPT-4o
Sep 03, 2024 pm 05:18 PM
L'équipe de Li Feifei a proposé ReKep pour donner aux robots une intelligence spatiale et intégrer GPT-4o
Sep 03, 2024 pm 05:18 PM
Intégration profonde de la vision et de l'apprentissage des robots. Lorsque deux mains de robot travaillent ensemble en douceur pour plier des vêtements, verser du thé et emballer des chaussures, associées au robot humanoïde 1X NEO qui a fait la une des journaux récemment, vous pouvez avoir le sentiment : nous semblons entrer dans l'ère des robots. En fait, ces mouvements soyeux sont le produit d’une technologie robotique avancée + d’une conception de cadre exquise + de grands modèles multimodaux. Nous savons que les robots utiles nécessitent souvent des interactions complexes et exquises avec l’environnement, et que l’environnement peut être représenté comme des contraintes dans les domaines spatial et temporel. Par exemple, si vous souhaitez qu'un robot verse du thé, le robot doit d'abord saisir la poignée de la théière et la maintenir verticalement sans renverser le thé, puis la déplacer doucement jusqu'à ce que l'embouchure de la théière soit alignée avec l'embouchure de la tasse. , puis inclinez la théière selon un certain angle. ce
 Conférence sur l'intelligence artificielle distribuée Appel à communications DAI 2024 : Agent Day, Richard Sutton, le père de l'apprentissage par renforcement, sera présent ! Yan Shuicheng, Sergey Levine et les scientifiques de DeepMind prononceront des discours d'ouverture
Aug 22, 2024 pm 08:02 PM
Conférence sur l'intelligence artificielle distribuée Appel à communications DAI 2024 : Agent Day, Richard Sutton, le père de l'apprentissage par renforcement, sera présent ! Yan Shuicheng, Sergey Levine et les scientifiques de DeepMind prononceront des discours d'ouverture
Aug 22, 2024 pm 08:02 PM
Introduction à la conférence Avec le développement rapide de la science et de la technologie, l'intelligence artificielle est devenue une force importante dans la promotion du progrès social. À notre époque, nous avons la chance d’être témoins et de participer à l’innovation et à l’application de l’intelligence artificielle distribuée (DAI). L’intelligence artificielle distribuée est une branche importante du domaine de l’intelligence artificielle, qui a attiré de plus en plus d’attention ces dernières années. Les agents basés sur de grands modèles de langage (LLM) ont soudainement émergé. En combinant les puissantes capacités de compréhension du langage et de génération des grands modèles, ils ont montré un grand potentiel en matière d'interaction en langage naturel, de raisonnement par connaissances, de planification de tâches, etc. AIAgent reprend le grand modèle de langage et est devenu un sujet brûlant dans le cercle actuel de l'IA. Au
