
 Périphériques technologiques
IA
Abandonnez l'architecture codeur-décodeur et utilisez le modèle de diffusion pour la détection des contours avec de meilleurs résultats. L'Université nationale de technologie de la défense a proposé DiffusionEdge.
Périphériques technologiques
IA
Abandonnez l'architecture codeur-décodeur et utilisez le modèle de diffusion pour la détection des contours avec de meilleurs résultats. L'Université nationale de technologie de la défense a proposé DiffusionEdge.
Abandonnez l'architecture codeur-décodeur et utilisez le modèle de diffusion pour la détection des contours avec de meilleurs résultats. L'Université nationale de technologie de la défense a proposé DiffusionEdge.

Les réseaux actuels de détection des contours profonds adoptent généralement une architecture d'encodeur-décodeur, qui contient des modules d'échantillonnage ascendant et descendant pour mieux extraire les fonctionnalités à plusieurs niveaux. Cependant, cette structure limite le réseau à produire des résultats de détection de contour précis et détaillés.
En réponse à ce problème, un article présenté à l'AAAI 2024 propose une nouvelle solution.
- Titre de l'article : DiffusionEdge : Diffusion Probabilistic Model for Crisp Edge Detection
- Auteurs : Ye Yunfan (Université nationale de technologie de la défense), Xu Kai (Université nationale de technologie de la défense), Huang Yuxing (Université nationale de technologie de défense), Yi Renjiao (Université nationale de technologie de défense), Cai Zhiping (Université nationale de technologie de défense)
- Lien papier : https://arxiv.org/abs/2401.02032
- Code open source : https://github.com/ GuHuangAI/DiffusionEdge
Le laboratoire iGRAPE de l'Université nationale de technologie de la défense a proposé une nouvelle méthode pour les tâches de détection de bords 2D. Cette méthode utilise un modèle de probabilité de diffusion pour générer des cartes de résultats de bord au cours d'un processus de débruitage itératif d'apprentissage. Afin de réduire la consommation de ressources informatiques, cette méthode utilise l'espace latent pour entraîner le réseau et introduit un module de distillation d'incertitude pour optimiser les performances. Dans le même temps, cette méthode adopte également une architecture découplée pour accélérer le processus de débruitage et introduit un filtre de Fourier adaptatif pour ajuster les caractéristiques. Grâce à ces conceptions, la méthode est capable de s'entraîner de manière stable avec des ressources limitées et de prédire des cartes de contour claires et précises avec moins de stratégies d'augmentation. Les résultats expérimentaux montrent que cette méthode surpasse considérablement les autres méthodes en termes d’exactitude et de précision sur quatre ensembles de données de référence publics.
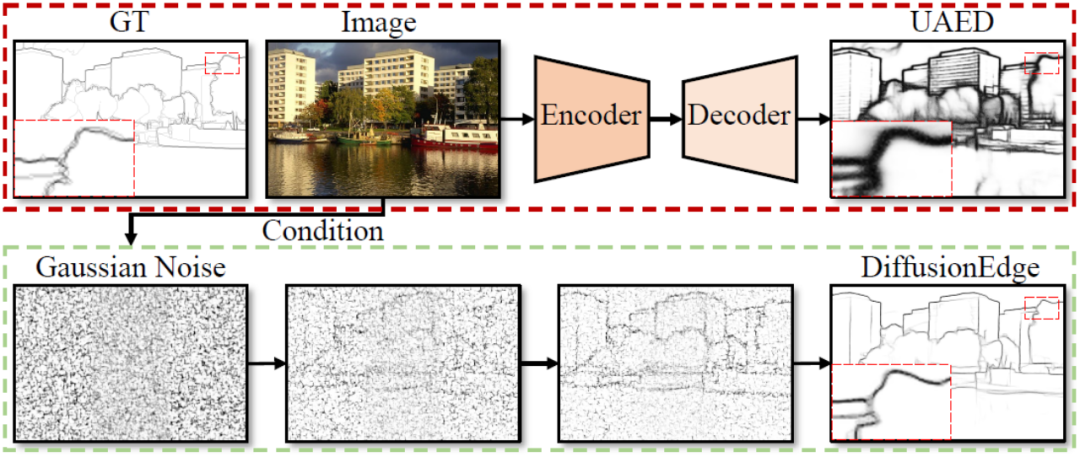
Figure 1 Exemple de processus de détection de contour et avantages basés sur un modèle de probabilité de diffusion
Les points d'innovation de cet article incluent :
Proposition d'un modèle de diffusion DiffusionEdge pour les tâches de détection de contour, qui ne nécessitent un post-traitement. Cela vous permet de prédire des cartes de contours plus fines et plus précises.
Afin de résoudre les difficultés d'application du modèle de diffusion, nous avons conçu une variété de techniques pour garantir que la méthode apprend de manière stable dans l'espace latent. Dans le même temps, nous conservons également les connaissances préalables sur l’incertitude au niveau des pixels et filtrons de manière adaptative les caractéristiques latentes dans l’espace de Fourier.
3. Des expériences comparatives approfondies menées sur quatre ensembles de données de référence publiques de détection de bords démontrent que DiffusionEdge présente d'excellents avantages en termes de performances en termes de précision et de finesse.
Travail associé
Les méthodes basées sur l'apprentissage en profondeur utilisent généralement une structure de codage et de décodage comprenant un échantillonnage ascendant et descendant pour intégrer des fonctionnalités multicouches [1-2], ou intègrent des informations d'incertitude provenant de plusieurs annotations pour améliorer la détection des contours. .précision[3]. Cependant, naturellement limitée par une telle structure, la carte de résultats de bord générée est trop épaisse pour les tâches en aval et repose fortement sur le post-traitement. Le problème doit encore être résolu. Bien que de nombreux travaux aient été explorés dans les fonctions de perte [4-5] et les stratégies de correction d'étiquettes [6] pour permettre au réseau de produire des bords plus fins, cet article estime que ce domaine a encore besoin d'une méthode pouvant être utilisée sans aucun module Edge supplémentaire. des détecteurs qui répondent directement à la précision et à la finesse sans aucune étape de post-traitement.
Le modèle de diffusion est un type de modèle génératif basé sur la chaîne de Markov, qui restaure progressivement des échantillons de données cibles grâce au processus d'apprentissage de débruitage. Les modèles de diffusion ont montré d'excellentes performances dans des domaines tels que la vision par ordinateur, le traitement du langage naturel et la génération audio. Non seulement cela, en utilisant des images ou d'autres entrées modales comme conditions supplémentaires, cela montre également un grand potentiel dans les tâches de perception, telles que la segmentation d'images [7], la détection de cibles [8] et l'estimation d'attitude [9], etc.
Description de la méthode
Le cadre global de la méthode DiffusionEdge proposée dans cet article est présenté dans la figure 2. Inspirée de travaux antérieurs, cette méthode entraîne un modèle de diffusion avec une structure découplée dans l'espace latent et entre des images comme indices conditionnels supplémentaires. Cette méthode introduit un filtre de Fourier adaptatif pour l'analyse de fréquence et, afin de conserver les informations d'incertitude au niveau des pixels provenant de plusieurs annotateurs et de réduire les besoins en ressources informatiques, elle utilise également directement l'optimisation des pertes d'entropie croisée de manière distillée.
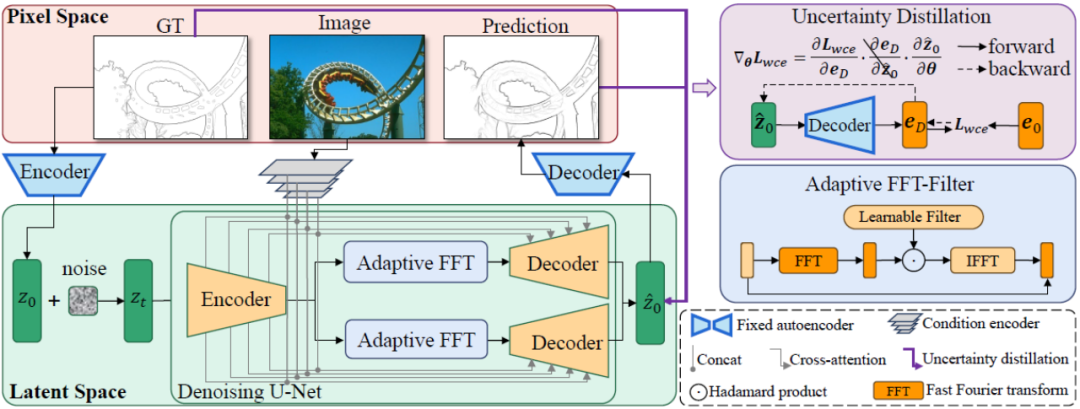
Figure 2 Diagramme schématique de la structure globale de DiffusionEdge
Comme le modèle de diffusion actuel est en proie à des problèmes tels qu'un trop grand nombre d'étapes d'échantillonnage et un temps d'inférence trop long, cette méthode s'inspire du DDM [10] et utilise également des diffusion. Architecture du modèle pour accélérer le processus d’inférence d’échantillonnage. Parmi eux, le processus de diffusion directe découplé est contrôlé par une combinaison de probabilité de transition explicite et de processus Wiener standard :

où  et
et  représentent respectivement le bord initial et le bord de bruit,
représentent respectivement le bord initial et le bord de bruit,  fait référence au bord inverse. fonction de transfert pour les dégradés. Semblable à DDM, cette méthode utilise la fonction constante
fait référence au bord inverse. fonction de transfert pour les dégradés. Semblable à DDM, cette méthode utilise la fonction constante  par défaut, et son processus inverse correspondant peut être exprimé comme suit :
par défaut, et son processus inverse correspondant peut être exprimé comme suit :

où  . Afin d'entraîner le modèle de diffusion découplé, la méthode nécessite une supervision simultanée des composantes de données et de bruit, par conséquent, l'objectif d'entraînement peut être paramétré comme :
. Afin d'entraîner le modèle de diffusion découplé, la méthode nécessite une supervision simultanée des composantes de données et de bruit, par conséquent, l'objectif d'entraînement peut être paramétré comme :

où  est le paramètre dans le réseau de débruitage. Étant donné que le modèle de diffusion nécessitera trop de coûts de calcul s'il est formé dans l'espace image d'origine, se référant à l'idée de [11], la méthode proposée dans cet article transfère le processus de formation dans un espace latent avec 4 fois le taille de l’espace de sous-échantillonnage.
est le paramètre dans le réseau de débruitage. Étant donné que le modèle de diffusion nécessitera trop de coûts de calcul s'il est formé dans l'espace image d'origine, se référant à l'idée de [11], la méthode proposée dans cet article transfère le processus de formation dans un espace latent avec 4 fois le taille de l’espace de sous-échantillonnage.
Comme le montre la figure 2, cette méthode entraîne d'abord une paire de réseaux d'encodeur et de décodeur automatiques. L'encodeur compresse l'annotation de bord en une variable latente, et le décodeur est utilisé pour récupérer de cette variable latente. . De cette façon, pendant la phase de formation du réseau de débruitage basé sur la structure U-Net, cette méthode fixe le poids de la paire de réseaux d'auto-encodeur et de décodeur et entraîne le processus de débruitage dans l'espace latent, ce qui peut réduire considérablement le temps de calcul. coût du réseau. consommation de ressources tout en conservant de bonnes performances.
Afin d'améliorer les performances finales du réseau, la méthode proposée dans cet article introduit un module capable de filtrer de manière adaptative différentes caractéristiques de fréquence lors de l'opération de découplage. Comme le montre le coin inférieur gauche de la figure 2, cette méthode intègre le filtre à transformée de Fourier rapide adaptatif (filtre FFT adaptatif) dans le réseau Unet de débruitage avant l'opération de découplage pour filtrer et séparer de manière adaptative dans le domaine fréquentiel la carte des bords extérieurs et le bruit. Composants. Plus précisément, étant donné la fonctionnalité d'encodeur  , la méthode effectue d'abord une transformation de Fourier bidimensionnelle (FFT) le long de la dimension spatiale et représente la caractéristique transformée sous la forme
, la méthode effectue d'abord une transformation de Fourier bidimensionnelle (FFT) le long de la dimension spatiale et représente la caractéristique transformée sous la forme  . Ensuite, afin d'entraîner ce module de filtrage spectral adaptatif, une carte de poids apprenable
. Ensuite, afin d'entraîner ce module de filtrage spectral adaptatif, une carte de poids apprenable  est construite et son W est multiplié par Fc. Les filtres spectraux peuvent ajuster globalement des fréquences spécifiques, et les poids appris peuvent être adaptés à différents cas de fréquence de distributions cibles dans différents ensembles de données. En filtrant de manière adaptative les composants indésirables, cette méthode mappe les caractéristiques du domaine fréquentiel vers le domaine spatial via une opération de transformation de Fourier rapide inverse (IFFT). Enfin, en introduisant en plus la connexion résiduelle de , nous évitons de filtrer complètement toutes les informations utiles. Le processus ci-dessus peut être décrit par la formule suivante :
est construite et son W est multiplié par Fc. Les filtres spectraux peuvent ajuster globalement des fréquences spécifiques, et les poids appris peuvent être adaptés à différents cas de fréquence de distributions cibles dans différents ensembles de données. En filtrant de manière adaptative les composants indésirables, cette méthode mappe les caractéristiques du domaine fréquentiel vers le domaine spatial via une opération de transformation de Fourier rapide inverse (IFFT). Enfin, en introduisant en plus la connexion résiduelle de , nous évitons de filtrer complètement toutes les informations utiles. Le processus ci-dessus peut être décrit par la formule suivante :

où  est la caractéristique de sortie et o représente le produit Hadamard.
est la caractéristique de sortie et o représente le produit Hadamard.
En raison du déséquilibre élevé entre le nombre de pixels de bord et de non-bord (la plupart des pixels sont des arrière-plans sans bord), en référence à des travaux antérieurs, nous introduisons également une fonction de perte tenant compte de l'incertitude pour l'entraînement. Plus précisément, comme la véritable probabilité de bord du i-ème pixel, pour le i-ème pixel dans la j-ème carte de bord, sa valeur est  , alors la perte WCE tenant compte de l'incertitude est calculée comme suit :
, alors la perte WCE tenant compte de l'incertitude est calculée comme suit :
où  , où
, où  est le seuil qui détermine les pixels de bord incertains dans l'annotation de valeur vraie. Si la valeur du pixel est supérieure à 0 et inférieure à ce seuil, de tels échantillons de pixels flous avec une confiance insuffisante seront utilisés dans l'optimisation ultérieure. processus est ignoré (la fonction de perte est 0).
est le seuil qui détermine les pixels de bord incertains dans l'annotation de valeur vraie. Si la valeur du pixel est supérieure à 0 et inférieure à ce seuil, de tels échantillons de pixels flous avec une confiance insuffisante seront utilisés dans l'optimisation ultérieure. processus est ignoré (la fonction de perte est 0).  et
et  représentent respectivement le nombre de pixels de bord et non-bord dans la carte de bord annotée de vérité terrain. est le poids utilisé pour équilibrer
représentent respectivement le nombre de pixels de bord et non-bord dans la carte de bord annotée de vérité terrain. est le poids utilisé pour équilibrer  et
et  (fixé à 1,1). Par conséquent, la fonction de perte finale pour chaque carte de bord est calculée comme suit :
(fixé à 1,1). Par conséquent, la fonction de perte finale pour chaque carte de bord est calculée comme suit :  .
.
Ignorer les pixels flous à faible confiance pendant le processus d'optimisation peut éviter la confusion du réseau, rendre le processus de formation plus stable et améliorer les performances du modèle. Cependant, il est presque impossible d’appliquer directement la perte d’entropie croisée binaire dans un espace latent qui est désaligné à la fois numériquement et spatialement. En particulier, la perte d'entropie croisée sensible à l'incertitude utilise un seuil  (généralement de 0 à 1) pour déterminer si un pixel est un bord, défini à partir de l'espace image, tandis que les variables latentes suivent une distribution normale et ont complètement portée et signification pratique différentes. De plus, l’incertitude au niveau des pixels est difficile à concilier avec différentes tailles de caractéristiques latentes codées et sous-échantillonnées, et les deux ne sont pas directement compatibles. Par conséquent, l’application directe de la perte d’entropie croisée pour optimiser les variables latentes conduit inévitablement à une perception incorrecte de l’incertitude.
(généralement de 0 à 1) pour déterminer si un pixel est un bord, défini à partir de l'espace image, tandis que les variables latentes suivent une distribution normale et ont complètement portée et signification pratique différentes. De plus, l’incertitude au niveau des pixels est difficile à concilier avec différentes tailles de caractéristiques latentes codées et sous-échantillonnées, et les deux ne sont pas directement compatibles. Par conséquent, l’application directe de la perte d’entropie croisée pour optimiser les variables latentes conduit inévitablement à une perception incorrecte de l’incertitude.
D'un autre côté, on peut choisir de décoder les variables latentes au niveau de l'image, supervisant ainsi directement la carte des résultats de bord prédits en utilisant une perte d'entropie croisée sensible à l'incertitude. Malheureusement, cette implémentation permet aux gradients de paramètres rétropropagés de passer à travers le réseau d'auto-encodeurs redondants, ce qui rend difficile le transfert efficace des gradients. De plus, des calculs de gradient supplémentaires dans le réseau d'auto-encodeurs entraîneront d'énormes coûts de consommation de mémoire GPU, ce qui viole l'intention initiale de cette méthode de concevoir un détecteur de bord pratique et est difficile à généraliser aux applications pratiques. Par conséquent, cette méthode propose une perte de distillation d'incertitude, qui peut directement optimiser le gradient sur l'espace latent. Plus précisément, soit la variable latente reconstruite  , le décodeur du réseau d'auto-encodeurs soit D et le résultat du bord décodé soit eD. envisage de calculer directement le gradient de la perte d'entropie croisée binaire consciente de l'incertitude
, le décodeur du réseau d'auto-encodeurs soit D et le résultat du bord décodé soit eD. envisage de calculer directement le gradient de la perte d'entropie croisée binaire consciente de l'incertitude  sur la base de la règle de chaîne. La méthode de calcul spécifique est la suivante :
sur la base de la règle de chaîne. La méthode de calcul spécifique est la suivante :
Afin d'éliminer l'impact négatif du réseau d'auto-encodeurs, cette méthode Le. l'autoencodeur  est directement sauté pour passer le dégradé et la méthode de calcul du dégradé
est directement sauté pour passer le dégradé et la méthode de calcul du dégradé  est modifiée et ajustée à :
est modifiée et ajustée à :
Une telle implémentation réduit considérablement le coût de calcul et permet une optimisation directe sur les variables latentes à l'aide de fonctions de perte sensibles à l'incertitude. De cette manière, combiné à une perte de poids variable dans le temps  qui change de manière adaptative avec le nombre d'étapes t, l'objectif final d'optimisation de l'entraînement de cette méthode peut être exprimé comme suit :
qui change de manière adaptative avec le nombre d'étapes t, l'objectif final d'optimisation de l'entraînement de cette méthode peut être exprimé comme suit :

Résultats expérimentaux
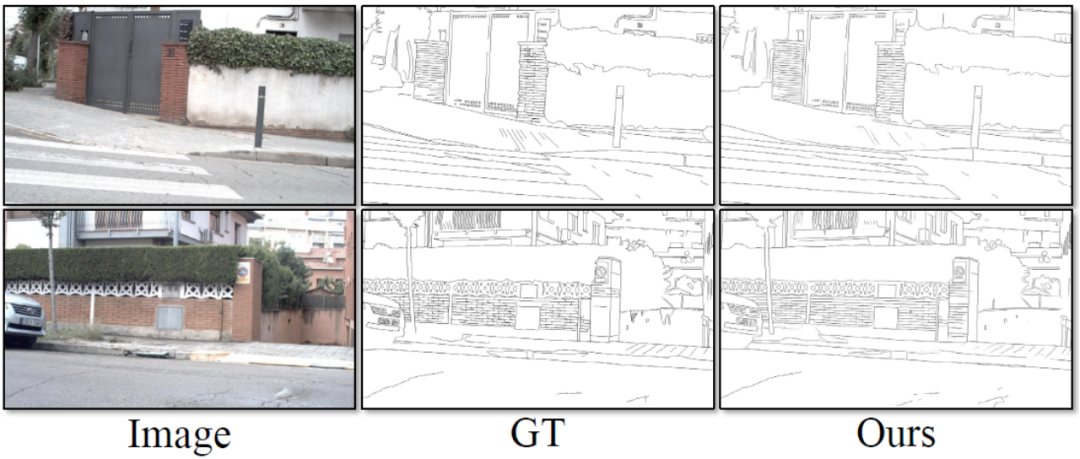
Ce La méthode comporte quatre expériences ont été menées sur des ensembles de données standards publics pour la détection des contours qui sont largement utilisés dans le domaine : BSDS, NYUDv2, Multicue et BIPED. Puisqu’il est difficile d’étiqueter les données de détection de contour et que la quantité de données étiquetées est relativement faible, les méthodes précédentes utilisent généralement diverses stratégies pour améliorer l’ensemble de données. Par exemple, les images dans BSDS sont améliorées par le retournement horizontal (2×), la mise à l'échelle (3×) et la rotation (16×), ce qui donne un ensemble d'entraînement 96 fois plus grand que la version originale. Les stratégies d'amélioration courantes utilisées par les méthodes précédentes sur d'autres ensembles de données sont résumées dans le tableau 1, où F représente le retournement horizontal, S représente la mise à l'échelle, R représente la rotation, C représente le recadrage et G représente la correction gamma. La différence est que cette méthode n'a besoin que d'utiliser des patchs d'image recadrés de manière aléatoire de 320320 pour entraîner toutes les données. Dans l'ensemble de données BSDS, cette méthode utilise uniquement un retournement et une mise à l'échelle aléatoires, et ses résultats de comparaison quantitative sont présentés dans le tableau 2. Dans les ensembles de données NYUDv2, Multicue et BIPED, la méthode doit uniquement être entraînée avec des retournements aléatoires. Avec moins de stratégies d’amélioration, cette méthode fonctionne mieux que les méthodes précédentes sur divers ensembles de données et divers indicateurs. En observant les résultats de prédiction de la figure 3-5, nous pouvons voir que DiffusionEdge peut apprendre et prédire des résultats de détection de contours qui sont presque les mêmes que la distribution gt. L'avantage de résultats de prédiction précis et clairs est très important pour les tâches en aval qui nécessitent un affinement. , et a également démontré son grand potentiel pour être directement appliqué aux tâches ultérieures.
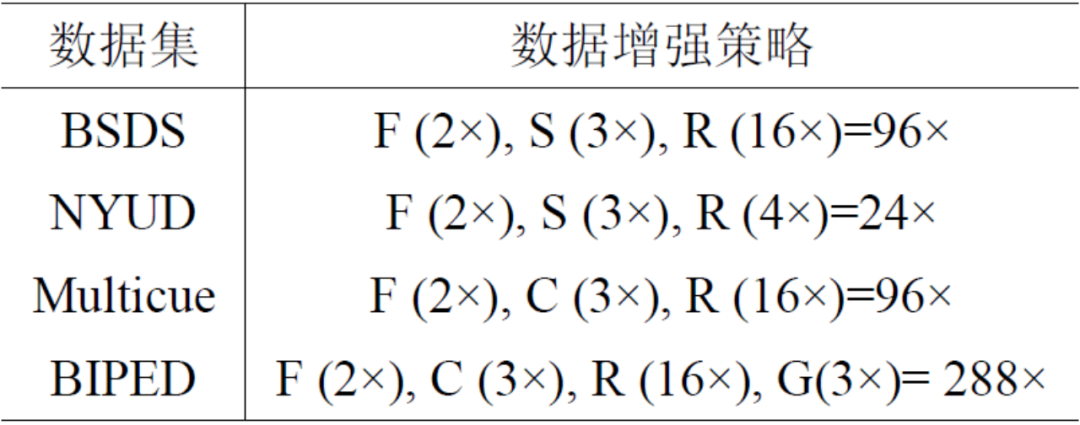
Tableau 1 Stratégies d'amélioration utilisées par les méthodes précédentes sur quatre ensembles de données de détection de contours
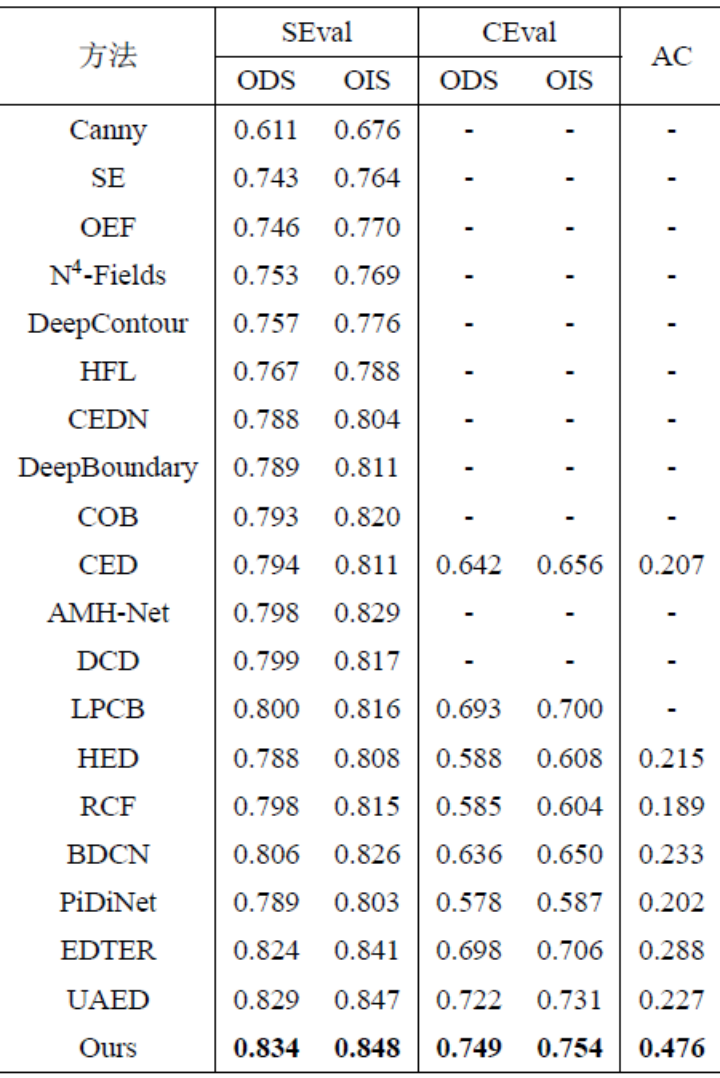
Tableau 2 Comparaison quantitative de différentes méthodes sur l'ensemble de données BSDS 3 Comparaison qualitative de différentes méthodes sur l'ensemble de données BSDS
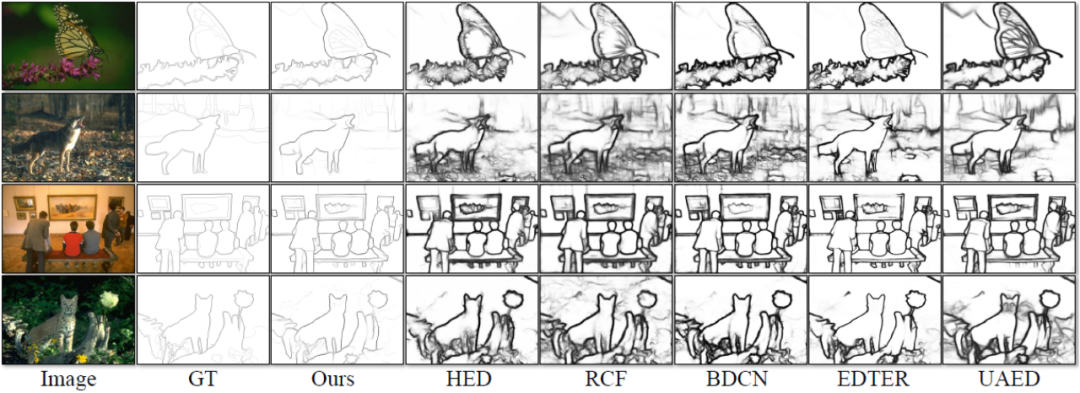
Figure 4 Comparaison qualitative de différentes méthodes sur l'ensemble de données NYUDv2
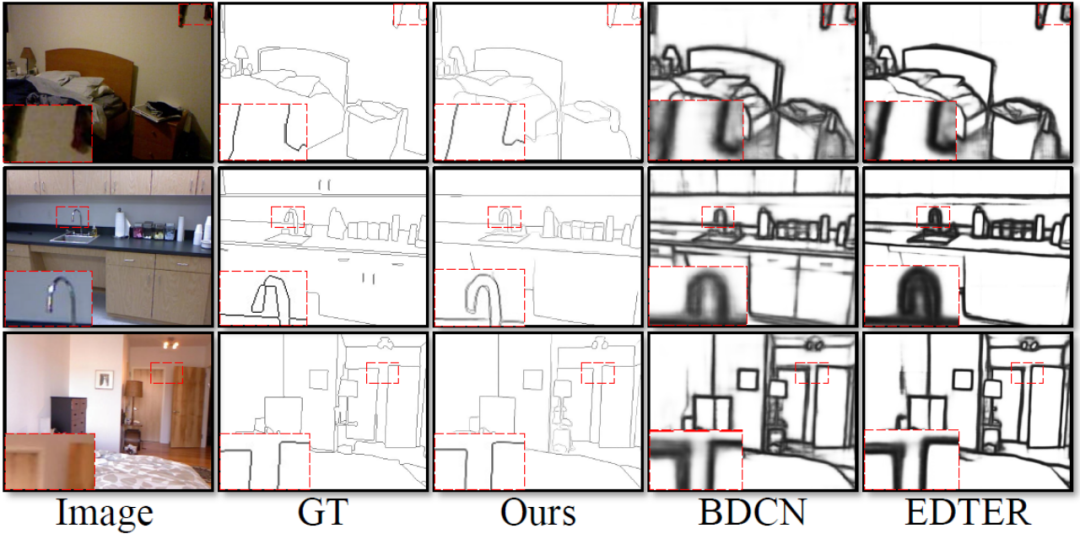
Figure 5 Comparaison qualitative de différentes méthodes sur l'ensemble de données BIPED
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Géospatial de Laravel: optimisation des cartes interactives et de grandes quantités de données
Apr 08, 2025 pm 12:24 PM
Géospatial de Laravel: optimisation des cartes interactives et de grandes quantités de données
Apr 08, 2025 pm 12:24 PM
Traiter efficacement 7 millions d'enregistrements et créer des cartes interactives avec la technologie géospatiale. Cet article explore comment traiter efficacement plus de 7 millions d'enregistrements en utilisant Laravel et MySQL et les convertir en visualisations de cartes interactives. Exigences initiales du projet de défi: extraire des informations précieuses en utilisant 7 millions d'enregistrements dans la base de données MySQL. Beaucoup de gens considèrent d'abord les langages de programmation, mais ignorent la base de données elle-même: peut-il répondre aux besoins? La migration des données ou l'ajustement structurel est-il requis? MySQL peut-il résister à une charge de données aussi importante? Analyse préliminaire: les filtres et les propriétés clés doivent être identifiés. Après analyse, il a été constaté que seuls quelques attributs étaient liés à la solution. Nous avons vérifié la faisabilité du filtre et établi certaines restrictions pour optimiser la recherche. Recherche de cartes basée sur la ville
 Comment résoudre MySQL ne peut pas être démarré
Apr 08, 2025 pm 02:21 PM
Comment résoudre MySQL ne peut pas être démarré
Apr 08, 2025 pm 02:21 PM
Il existe de nombreuses raisons pour lesquelles la startup MySQL échoue, et elle peut être diagnostiquée en vérifiant le journal des erreurs. Les causes courantes incluent les conflits de port (vérifier l'occupation du port et la configuration de modification), les problèmes d'autorisation (vérifier le service exécutant les autorisations des utilisateurs), les erreurs de fichier de configuration (vérifier les paramètres des paramètres), la corruption du répertoire de données (restaurer les données ou reconstruire l'espace de la table), les problèmes d'espace de la table InNODB (vérifier les fichiers IBDATA1), la défaillance du chargement du plug-in (vérification du journal des erreurs). Lors de la résolution de problèmes, vous devez les analyser en fonction du journal d'erreur, trouver la cause profonde du problème et développer l'habitude de sauvegarder régulièrement les données pour prévenir et résoudre des problèmes.
 Comment utiliser MySQL après l'installation
Apr 08, 2025 am 11:48 AM
Comment utiliser MySQL après l'installation
Apr 08, 2025 am 11:48 AM
L'article présente le fonctionnement de la base de données MySQL. Tout d'abord, vous devez installer un client MySQL, tel que MySQLWorkBench ou le client de ligne de commande. 1. Utilisez la commande MySQL-UROot-P pour vous connecter au serveur et connecter avec le mot de passe du compte racine; 2. Utilisez Createdatabase pour créer une base de données et utilisez Sélectionner une base de données; 3. Utilisez CreateTable pour créer une table, définissez des champs et des types de données; 4. Utilisez InsertInto pour insérer des données, remettre en question les données, mettre à jour les données par mise à jour et supprimer les données par Supprimer. Ce n'est qu'en maîtrisant ces étapes, en apprenant à faire face à des problèmes courants et à l'optimisation des performances de la base de données que vous pouvez utiliser efficacement MySQL.
 Mysql peut-il renvoyer JSON
Apr 08, 2025 pm 03:09 PM
Mysql peut-il renvoyer JSON
Apr 08, 2025 pm 03:09 PM
MySQL peut renvoyer les données JSON. La fonction JSON_Extract extrait les valeurs de champ. Pour les requêtes complexes, envisagez d'utiliser la clause pour filtrer les données JSON, mais faites attention à son impact sur les performances. Le support de MySQL pour JSON augmente constamment, et il est recommandé de faire attention aux dernières versions et fonctionnalités.
 MySQL ne peut pas être installé après le téléchargement
Apr 08, 2025 am 11:24 AM
MySQL ne peut pas être installé après le téléchargement
Apr 08, 2025 am 11:24 AM
Les principales raisons de la défaillance de l'installation de MySQL sont les suivantes: 1. Problèmes d'autorisation, vous devez s'exécuter en tant qu'administrateur ou utiliser la commande sudo; 2. Des dépendances sont manquantes et vous devez installer des packages de développement pertinents; 3. Conflits du port, vous devez fermer le programme qui occupe le port 3306 ou modifier le fichier de configuration; 4. Le package d'installation est corrompu, vous devez télécharger et vérifier l'intégrité; 5. La variable d'environnement est mal configurée et les variables d'environnement doivent être correctement configurées en fonction du système d'exploitation. Résolvez ces problèmes et vérifiez soigneusement chaque étape pour installer avec succès MySQL.
 Les ingénieurs de backend senior à distance (plates-formes) ont besoin de cercles
Apr 08, 2025 pm 12:27 PM
Les ingénieurs de backend senior à distance (plates-formes) ont besoin de cercles
Apr 08, 2025 pm 12:27 PM
Ingénieur backend à distance Emploi Vacant Société: Emplacement du cercle: Bureau à distance Type d'emploi: Salaire à temps plein: 130 000 $ - 140 000 $ Description du poste Participez à la recherche et au développement des applications mobiles Circle et des fonctionnalités publiques liées à l'API couvrant l'intégralité du cycle de vie de développement logiciel. Les principales responsabilités complètent indépendamment les travaux de développement basés sur RubyOnRails et collaborent avec l'équipe frontale React / Redux / Relay. Créez les fonctionnalités de base et les améliorations des applications Web et travaillez en étroite collaboration avec les concepteurs et le leadership tout au long du processus de conception fonctionnelle. Promouvoir les processus de développement positifs et hiérarchiser la vitesse d'itération. Nécessite plus de 6 ans de backend d'applications Web complexe
 Comprendre les propriétés acides: les piliers d'une base de données fiable
Apr 08, 2025 pm 06:33 PM
Comprendre les propriétés acides: les piliers d'une base de données fiable
Apr 08, 2025 pm 06:33 PM
Une explication détaillée des attributs d'acide de base de données Les attributs acides sont un ensemble de règles pour garantir la fiabilité et la cohérence des transactions de base de données. Ils définissent comment les systèmes de bases de données gérent les transactions et garantissent l'intégrité et la précision des données même en cas de plantages système, d'interruptions d'alimentation ou de plusieurs utilisateurs d'accès simultanément. Présentation de l'attribut acide Atomicité: une transaction est considérée comme une unité indivisible. Toute pièce échoue, la transaction entière est reculée et la base de données ne conserve aucune modification. Par exemple, si un transfert bancaire est déduit d'un compte mais pas augmenté à un autre, toute l'opération est révoquée. BeginTransaction; UpdateAccountSsetBalance = Balance-100Wh
 Master SQL Limit Clause: Contrôlez le nombre de lignes dans une requête
Apr 08, 2025 pm 07:00 PM
Master SQL Limit Clause: Contrôlez le nombre de lignes dans une requête
Apr 08, 2025 pm 07:00 PM
Clause SQLLIMIT: Contrôlez le nombre de lignes dans les résultats de la requête. La clause limite dans SQL est utilisée pour limiter le nombre de lignes renvoyées par la requête. Ceci est très utile lors du traitement de grands ensembles de données, des affichages paginés et des données de test, et peut améliorer efficacement l'efficacité de la requête. Syntaxe de base de la syntaxe: selectColumn1, Column2, ... FromTable_NamelimitNumber_Of_Rows; Number_OF_ROWS: Spécifiez le nombre de lignes renvoyées. Syntaxe avec décalage: selectColumn1, Column2, ... FromTable_Namelimitoffset, numéro_of_rows; décalage: sauter
