
 Périphériques technologiques
IA
Superbe! ! ! Analyse vidéo de démonstration de bout en bout de Tesla
Périphériques technologiques
IA
Superbe! ! ! Analyse vidéo de démonstration de bout en bout de Tesla
Superbe! ! ! Analyse vidéo de démonstration de bout en bout de Tesla

Un utilisateur a posté une vidéo de Tesla FSD v12 sur Internet, et quelqu'un l'a déplacée vers le site b :
https://www.bilibili.com/video/BV1Z6421M797www.bilibili.com/video/BV1Z6421M797
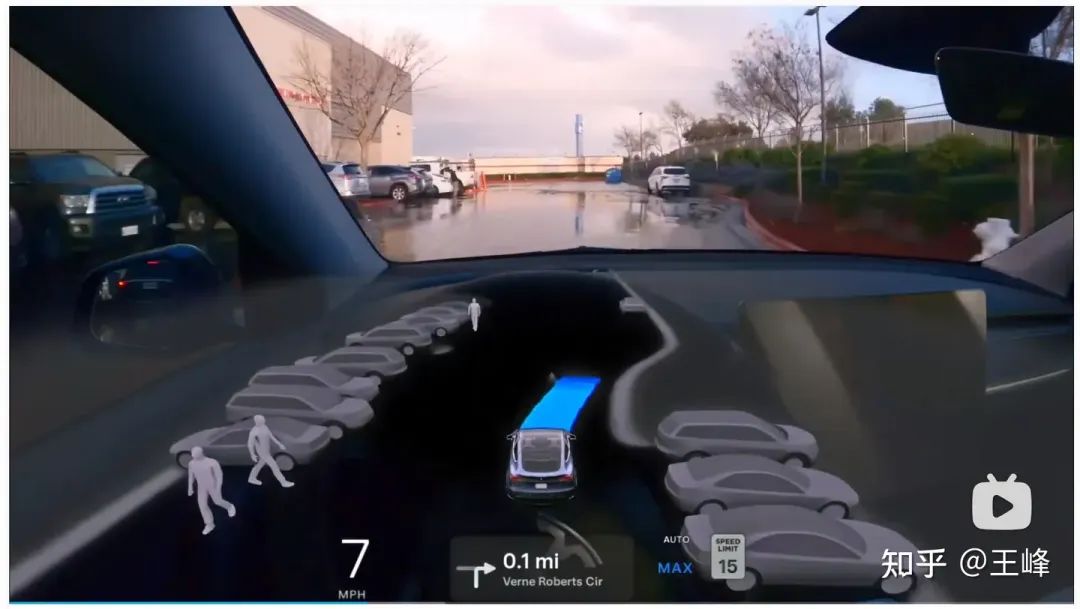
Cette fois il s'agit d'une scène purement visuellement complexe : il pleut et il y a de l'eau sur le sol, et divers motifs se reflètent sur l'eau, ce qui peut produire des effets visuels étranges. Tesla n'a pas organisé d'événement AI Day l'année dernière, prétendument parce que les concurrents provoquaient souvent leurs glissades, et l'ont donc simplement annulé. En l’absence de détails, regarder la vidéo donne un aperçu de certaines fonctionnalités de bout en bout. Ensuite, analysons quelques-uns des points intéressants.
01:57, a détecté par erreur que la portière de la voiture était ouverte, et a fait un grand détour :

Ce n'est pas un gros problème ici, il y a un espace relativement grand sur le côté gauche, donc ce n'est pas grave si vous faites le tour un peu plus longtemps.
02:09, une erreur de détection d'occ a provoqué quasiment un arrêt :

Les piétons sont partis, nous pouvons commencer à avancer. Cependant, il y avait beaucoup d'eau stagnante au sol, reflétant l'image de l'objet, ce qui pouvait conduire à de fausses détections, nous nous sommes donc arrêtés et avons attendu un moment avant de repartir.
04:40, le véhicule d'intervention en marche arrière à courte portée a été manqué


Le véhicule d'intervention en marche arrière à très courte portée sur le côté gauche a été manqué, mais la planification ne semble pas donner l'intention de le démarrage, qui reflète la fin. Un avantage majeur du bout en bout : les résultats des erreurs en amont n'entraînent pas nécessairement un mauvais comportement de conduite. Nous verrons d'autres exemples similaires plus tard.
05:37 Erreur de détection d'occ

Cela peut aussi être un occ provoqué par une accumulation d'eau au sol J'ai accepté ce résultat bout à bout et j'ai tourné le volant à gauche et à droite, parfois vers la gauche. et parfois à droite.
05:48, erreur de détection d'OCC à bout portant à gauche et à droite

Il y a eu une erreur de détection d'OCC à une position très rapprochée à gauche et à droite. Si vous suivez toujours les règles, vous devrez peut-être le signaler. c'est pour prendre le relais (pas forcément, après tout, ce n'est pas rouler) Sur piste), ici j'ignore directement ces deux OCC de bout en bout et continue de rouler.
06:57, Erreur de détection d'un piéton à bout portant devant vous

C'est vraiment cool, un piéton apparaît sur le visage, toutes les commandes basées sur des règles freineront définitivement + alarme à ce moment, mais la fin Le modèle final ne reconnaît pas les résultats en amont et continue de fonctionner comme d'habitude.
14 points : Je tournais dans un parking privé et je n'arrivais pas à sortir
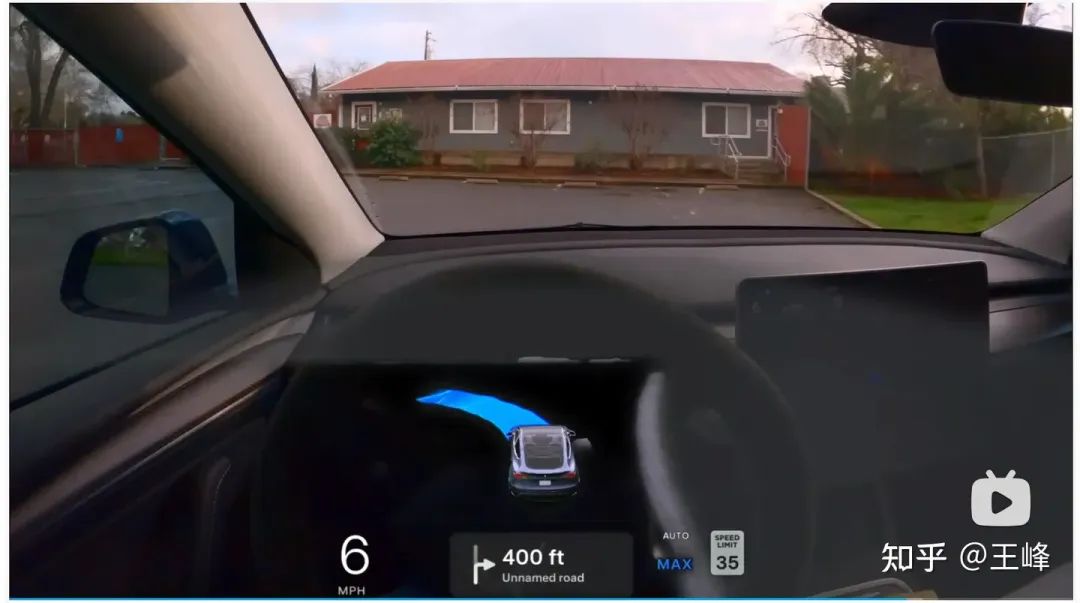
C'est peut-être un problème avec la distance de détection insuffisante du BEV. Je n'arrivais pas à trouver la sortie et je tournais dans un parking. . .
Les autres clips concernent la conduite sur route principale, les performances du FSD v12 sont très fluides, il n'y a pas de gros problème, surtout la détection des lignes de voie la nuit est également très stable, mais je pense la plupart des fabricants peuvent également atteindre ce niveau, je n'en parlerai pas beaucoup.
En regardant uniquement la section du parking, si vous ne regardez pas les résultats en amont, à l'exception de l'erreur de détection de l'OCC avant qui a fait tourner le volant à gauche et à droite, la trajectoire du FSD v12 est encore relativement fluide, et même s'il y a des erreurs, il n'y a aucune situation où il reste bloqué. Dans une telle scène avec des piétons, des obstacles en mouvement irrégulier (chariots) et de l'eau au sol, la performance est effectivement correcte.
Tesla utilise toujours le multitâche de bout en bout avec une supervision de module intermédiaire, de sorte que le front-end peut toujours afficher les résultats de obj det et occ. Cependant, la réglementation de bout en bout n'accepte pas nécessairement les résultats en amont. Une détection manquée à courte distance n'entraîne pas nécessairement un démarrage et un accident, et une détection erronée à courte distance ne provoque pas nécessairement l'arrêt du véhicule. . Tous les résultats sont entrés dans le PNC pour un jugement complet. C’est effectivement un point intéressant. Ce qui est sûr, c’est que Musk ne ment pas. Il s’agit bien de la performance d’un système de bout en bout.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Apr 15, 2024 pm 04:13 PM
Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSDV12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion. Comment définir un système de conduite autonome de bout en bout et quels problèmes devraient être résolus de bout en bout ? Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, saisir les données de divers capteurs (caméra/LiDAR
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
La détection de cibles est un problème relativement mature dans les systèmes de conduite autonome, parmi lesquels la détection des piétons est l'un des premiers algorithmes à être déployés. Des recherches très complètes ont été menées dans la plupart des articles. Cependant, la perception de la distance à l’aide de caméras fisheye pour une vue panoramique est relativement moins étudiée. En raison de la distorsion radiale importante, la représentation standard du cadre de délimitation est difficile à mettre en œuvre dans les caméras fisheye. Pour alléger la description ci-dessus, nous explorons les conceptions étendues de boîtes englobantes, d'ellipses et de polygones généraux dans des représentations polaires/angulaires et définissons une métrique de segmentation d'instance mIOU pour analyser ces représentations. Le modèle fisheyeDetNet proposé avec une forme polygonale surpasse les autres modèles et atteint simultanément 49,5 % de mAP sur l'ensemble de données de la caméra fisheye Valeo pour la conduite autonome.
 Tesla passe enfin à l'action ! Les taxis autonomes seront-ils bientôt dévoilés ? !
Apr 08, 2024 pm 05:49 PM
Tesla passe enfin à l'action ! Les taxis autonomes seront-ils bientôt dévoilés ? !
Apr 08, 2024 pm 05:49 PM
Selon les informations du 8 avril, le PDG de Tesla, Elon Musk, a récemment révélé que Tesla s'était engagé à développer pleinement la technologie des voitures autonomes. Le très attendu taxi autonome sans pilote Robotaxi sera lancé le 8 août. L'éditeur de données a appris que la déclaration de Musk sur Auparavant, Reuters avait rapporté que le projet de Tesla de conduire des voitures se concentrerait sur la production de Robotaxi. Cependant, Musk a réfuté cette affirmation, accusant Reuters d'avoir annulé les projets de développement de voitures à bas prix et de publier à nouveau de faux rapports, tout en précisant que les voitures à bas prix Model 2 et Robotax
 Musk : débuts du supercalcul Tesla Dojo : la puissance de calcul de l'IA de formation d'ici la fin de l'année sera approximativement égale à 8 000 GPU NVIDIA H100
Jul 24, 2024 am 10:38 AM
Musk : débuts du supercalcul Tesla Dojo : la puissance de calcul de l'IA de formation d'ici la fin de l'année sera approximativement égale à 8 000 GPU NVIDIA H100
Jul 24, 2024 am 10:38 AM
Selon les informations de ce site du 24 juillet, le PDG de Tesla, Elon Musk, a déclaré aujourd'hui lors d'une conférence téléphonique sur les résultats que la société était sur le point d'achever le plus grand cluster de formation en intelligence artificielle à ce jour, qui sera équipé de 2 000 GPU NVIDIA H100. Musk a également déclaré aux investisseurs lors de la conférence téléphonique sur les résultats de la société que Tesla travaillerait au développement de son supercalculateur Dojo, car les GPU de Nvidia sont chers. Ce site traduit une partie du discours de Musk comme suit : Le chemin pour rivaliser avec NVIDIA via Dojo est difficile, mais je pense que nous n'avons pas le choix. Nous dépendons désormais trop de NVIDIA. Du point de vue de NVIDIA, ils augmenteront inévitablement le prix des GPU à un niveau que le marché peut supporter, mais
 Tueur de production de masse ! P-Mapnet : En utilisant la carte de basse précision SDMap précédente, les performances de cartographie sont violemment améliorées de près de 20 points !
Mar 28, 2024 pm 02:36 PM
Tueur de production de masse ! P-Mapnet : En utilisant la carte de basse précision SDMap précédente, les performances de cartographie sont violemment améliorées de près de 20 points !
Mar 28, 2024 pm 02:36 PM
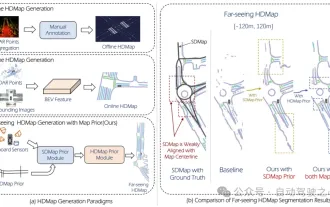
Comme indiqué ci-dessus, l'un des algorithmes utilisés par les systèmes de conduite autonome actuels pour se débarrasser de la dépendance aux cartes de haute précision consiste à tirer parti du fait que les performances de perception sur de longues distances sont encore médiocres. À cette fin, nous proposons P-MapNet, où le « P » se concentre sur la fusion des cartes a priori pour améliorer les performances du modèle. Plus précisément, nous exploitons les informations préalables dans SDMap et HDMap : d'une part, nous extrayons les données SDMap faiblement alignées d'OpenStreetMap et les encodons en termes indépendants pour prendre en charge l'entrée. Il existe un problème de faible alignement entre l'entrée strictement modifiée et la carte HD+ réelle. Notre structure basée sur le mécanisme d'attention croisée peut se concentrer de manière adaptative sur le squelette SDMap et apporter des améliorations significatives des performances ;
 Le LLM est terminé ! OmniDrive : Intégration de la perception 3D et de la planification du raisonnement (la dernière version de NVIDIA)
May 09, 2024 pm 04:55 PM
Le LLM est terminé ! OmniDrive : Intégration de la perception 3D et de la planification du raisonnement (la dernière version de NVIDIA)
May 09, 2024 pm 04:55 PM
Écrit ci-dessus et compréhension personnelle de l'auteur : cet article est dédié à la résolution des principaux défis des grands modèles de langage multimodaux (MLLM) actuels dans les applications de conduite autonome, c'est-à-dire le problème de l'extension des MLLM de la compréhension 2D à l'espace 3D. Cette expansion est particulièrement importante car les véhicules autonomes (VA) doivent prendre des décisions précises concernant les environnements 3D. La compréhension spatiale 3D est essentielle pour les véhicules utilitaires car elle a un impact direct sur la capacité du véhicule à prendre des décisions éclairées, à prédire les états futurs et à interagir en toute sécurité avec l’environnement. Les modèles de langage multimodaux actuels (tels que LLaVA-1.5) ne peuvent souvent gérer que des entrées d'images de résolution inférieure (par exemple) en raison des limitations de résolution de l'encodeur visuel et des limitations de la longueur de la séquence LLM. Cependant, les applications de conduite autonome nécessitent
