

Le 27 février 2024, l'article « Cam4DOcc : Benchmark for Camera-Only 4D Occupancy Forecasting in Autonomous Driving Applications » soumis par l'équipe de technologie d'intelligence artificielle de HaoMo Zhixing a été sélectionné avec succès pour la plus grande conférence internationale CVPR 2024.
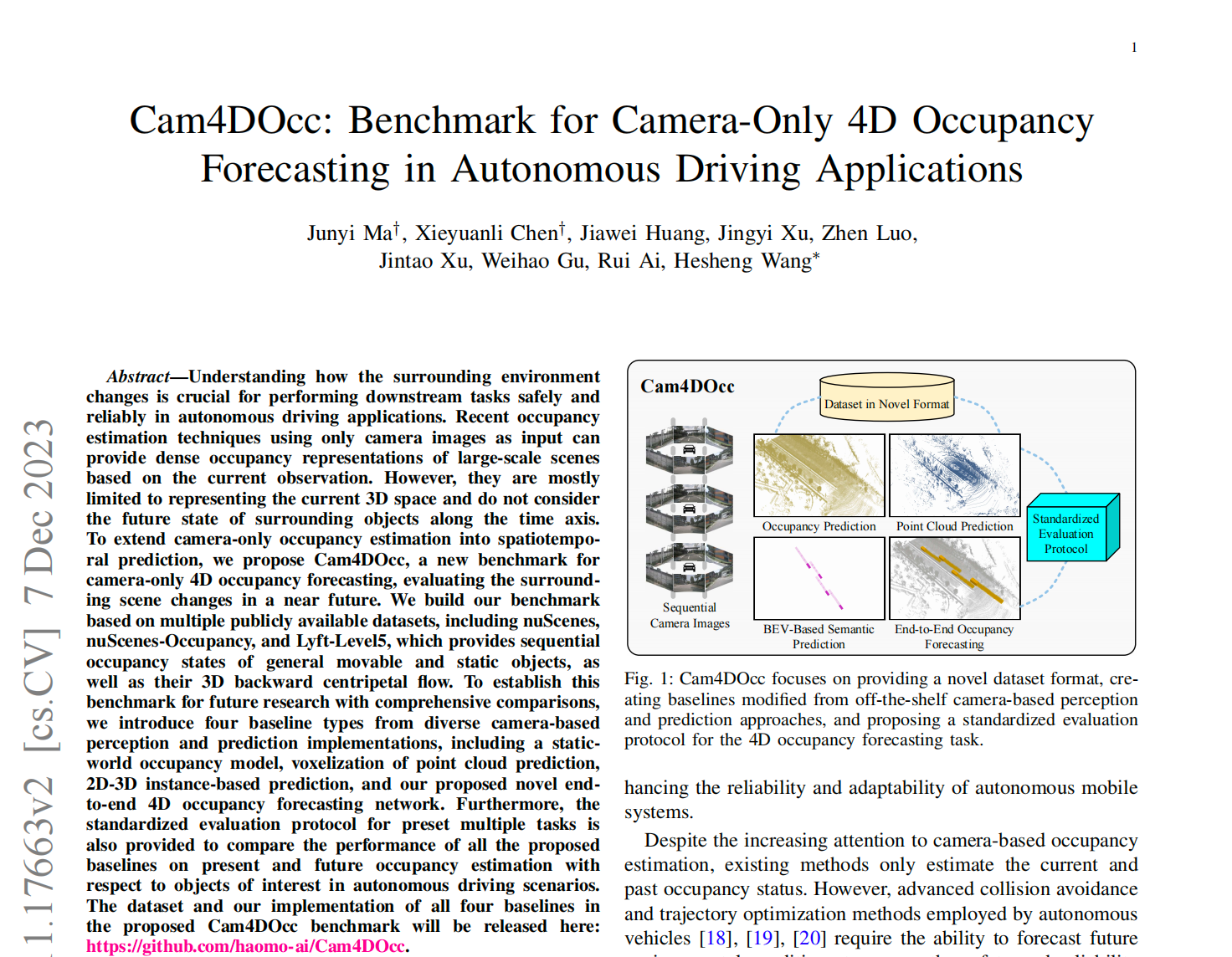
Cam4DOcc est un nouveau benchmark proposé par Hao Mo, qui utilise des caméras pour la prédiction de grille d'occupation 4D. Cette méthode permet d'évaluer les changements dans la scène environnante dans un avenir proche, en étendant l'estimation de la grille d'occupation de la caméra à la prédiction spatio-temporelle. De cette manière, la capacité du système de conduite autonome à percevoir et à prédire les changements dynamiques de l'environnement a été améliorée.
Tout d'abord, Haomo a créé un nouvel ensemble de données de format basé sur plusieurs ensembles de données accessibles au public, et a en outre proposé un protocole d'évaluation standardisé et quatre types de référence pour fournir une référence de base pour le benchmark Cam4DOcc. Deuxièmement, Haimo a proposé le premier réseau de prédiction d'occupation 4D basé sur des caméras, OCFNet, pour estimer l'état d'occupation futur de bout en bout. Enfin, Haomo a mené plusieurs expériences basées sur le benchmark Cam4DOcc, impliquant quatre tâches différentes, pour évaluer de manière exhaustive la référence proposée ainsi qu'OCFNet. Les résultats expérimentaux montrent qu'OCFNet surpasse toutes les références et produit une occupation future raisonnable même en voyant des données de formation limitées. En comparant quatre types différents de lignes de base, Haomo démontre que les réseaux spatio-temporels de bout en bout pourraient constituer l’orientation de recherche la plus prometteuse pour la prévision de l’occupation en utilisant uniquement des caméras. En outre, l’utilisation d’annotations OGM dilatées et d’un flux radial inverse 3D supplémentaire s’est également révélée bénéfique pour les prévisions d’occupation 4D.

La conférence IEEE sur la vision par ordinateur et la reconnaissance de formes (CVPR) est l'une des trois principales conférences dans le domaine de la vision par ordinateur et de la reconnaissance de formes. Elle est organisée par l'Université de Newcastle, l'Université de technologie de Sydney, John H. Top. des écoles et des institutions telles que l'Université de Princeton. Le CVPR a des normes d'admission très strictes. L'article de Hao Mo proposant la méthode Cam4DOcc a été sélectionné avec succès pour le CVPR2024, ce qui représente une reconnaissance des réalisations de Hao Mo en matière d'exploration technologique.
Depuis sa création, Haimo s'est toujours basée sur l'innovation technologique et a continuellement obtenu de nombreux brevets technologiques qui dominent l'industrie. Elle a pris les devants en définissant l'orientation du développement de la technologie de conduite autonome avec de grands modèles, une grande puissance de calcul, et le big data en Chine. Le premier modèle génératif de conduite autonome de l'industrie, DriveGPT, Xuehu·Hairuo, publié par Haimo, a apporté d'énormes améliorations technologiques dans le processus de développement du système de conduite autonome, faisant entrer complètement le développement du système de conduite autonome de Haimo dans un nouveau mode, et cela a également considérablement accéléré le processus de développement de l’intelligence automobile.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 mesures de protection de la sécurité du serveur cdn
mesures de protection de la sécurité du serveur cdn
 win10 se connecte à une imprimante partagée
win10 se connecte à une imprimante partagée
 Logiciel de cryptage de téléphone portable
Logiciel de cryptage de téléphone portable
 python configurer les variables d'environnement
python configurer les variables d'environnement
 esd en iso
esd en iso
 Qu'est-ce que l'indice Baidu
Qu'est-ce que l'indice Baidu
 Quel logiciel utilisez-vous pour ouvrir les fichiers DAT ?
Quel logiciel utilisez-vous pour ouvrir les fichiers DAT ?
 Win10 ne prend pas en charge la solution de configuration de disque du micrologiciel Uefi
Win10 ne prend pas en charge la solution de configuration de disque du micrologiciel Uefi








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



