
 Tutoriel matériel
Examen du matériel
Entraînez votre chien robot en temps réel avec Vision Pro ! Le projet open source d'un doctorant du MIT est populaire
Tutoriel matériel
Examen du matériel
Entraînez votre chien robot en temps réel avec Vision Pro ! Le projet open source d'un doctorant du MIT est populaire
Entraînez votre chien robot en temps réel avec Vision Pro ! Le projet open source d'un doctorant du MIT est populaire

Vision Pro a un autre nouveau gameplay très intéressant, cette fois il est lié à l'intelligence incarnée ~
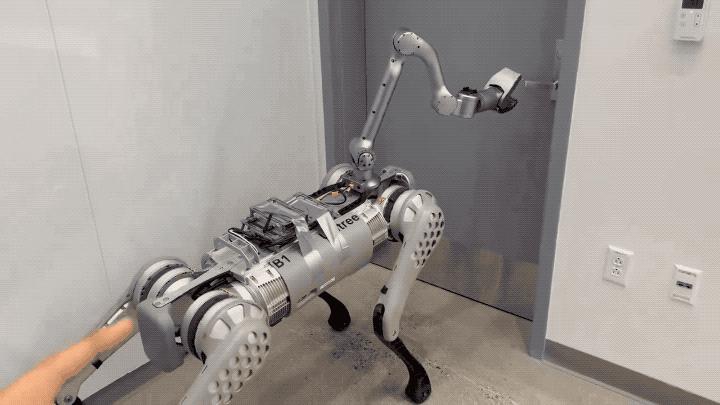
Juste comme ça, le gars du MIT a utilisé la fonction de suivi des mains de Vision Pro pour réussir à contrôler en temps réel le chien robot.

Non seulement les actions telles que l'ouverture d'une porte peuvent être précises, mais il n'y a également presque aucun retard.
Dès la sortie de la démo, non seulement les internautes ont fait l'éloge de Goose Girl, mais divers chercheurs en intelligence incarnée étaient également enthousiasmés.
Par exemple, ce futur doctorant de l'Université Tsinghua : 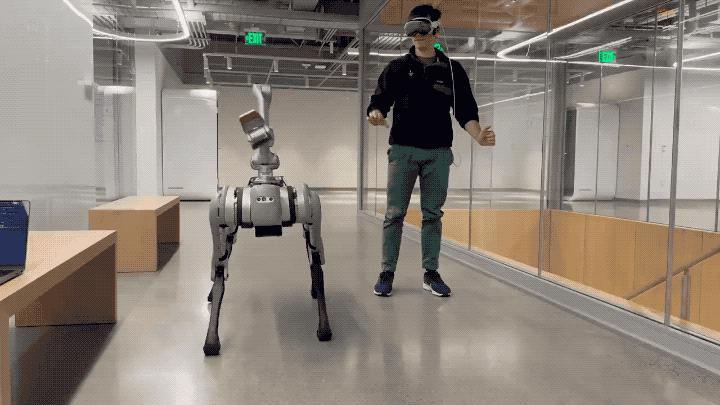
Certaines personnes prédisent avec audace : C'est ainsi que nous interagirons avec la prochaine génération de machines.
 Regardons de plus près l'application développée par l'auteur - Tracking Steamer.
Regardons de plus près l'application développée par l'auteur - Tracking Steamer.
Comme son nom l'indique, cette application est conçue pour utiliser Vision Pro pour suivre les mouvements humains et transmettre ces données de mouvement à d'autres appareils robotiques sous le même WiFi en temps réel. 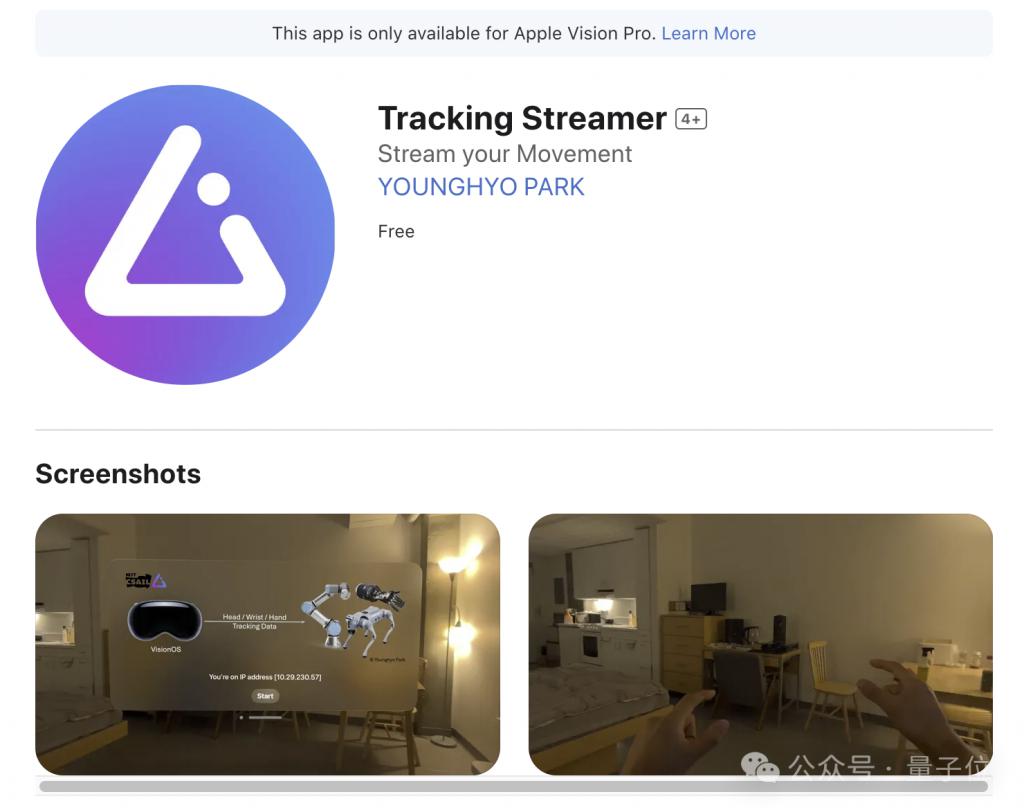
La partie suivi de mouvement s'appuie principalement sur la bibliothèque ARKit d'Apple.
Le suivi de la tête appelle queryDeviceAnchor. Les utilisateurs peuvent réinitialiser le cadre principal à sa position actuelle en appuyant longuement sur la couronne numérique. 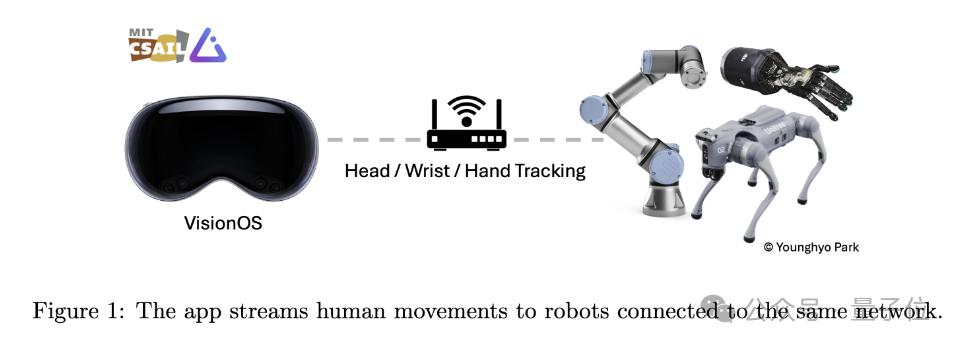
En termes de communication réseau, cette application utilise gRPC comme protocole de communication réseau pour diffuser des données. Cela permet d'abonner des données à davantage d'appareils, notamment des appareils Linux, Mac et Windows.
De plus, afin de faciliter la transmission des données, l'auteur a également préparé une API Python qui permet aux développeurs de s'abonner et de recevoir des données de suivi diffusées depuis Vision Pro par programmation. 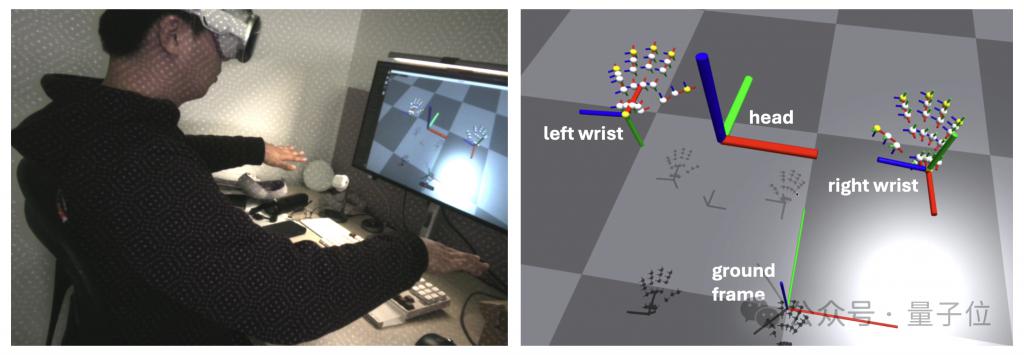
Comme de nombreux professionnels l'ont souligné, que les mouvements du chien robot soient ou non toujours contrôlés par des humains, en fait, par rapport au « contrôle » lui-même, combiné à l'algorithme d'apprentissage par imitation, les humains sont plus capables de ce processus. Comme un entraîneur de robot.
Vision Pro fournit une méthode d'interaction intuitive et simple en suivant les mouvements de l'utilisateur, permettant aux non-professionnels de fournir des données d'entraînement précises pour les robots. 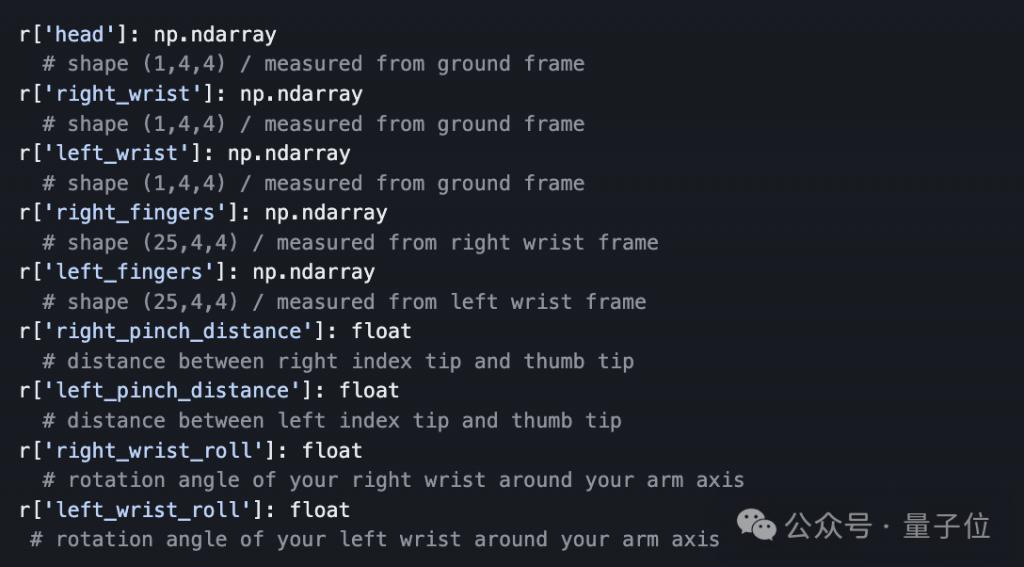
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 Comment résoudre le problème des autorisations rencontré lors de la visualisation de la version Python dans le terminal Linux?
Apr 01, 2025 pm 05:09 PM
Comment résoudre le problème des autorisations rencontré lors de la visualisation de la version Python dans le terminal Linux?
Apr 01, 2025 pm 05:09 PM
Solution aux problèmes d'autorisation Lors de la visualisation de la version Python dans Linux Terminal Lorsque vous essayez d'afficher la version Python dans Linux Terminal, entrez Python ...
 Comment copier efficacement la colonne entière d'une dataframe dans une autre dataframe avec différentes structures dans Python?
Apr 01, 2025 pm 11:15 PM
Comment copier efficacement la colonne entière d'une dataframe dans une autre dataframe avec différentes structures dans Python?
Apr 01, 2025 pm 11:15 PM
Lorsque vous utilisez la bibliothèque Pandas de Python, comment copier des colonnes entières entre deux frames de données avec différentes structures est un problème courant. Supposons que nous ayons deux dats ...
 Les annotations des paramètres Python peuvent-elles utiliser des chaînes?
Apr 01, 2025 pm 08:39 PM
Les annotations des paramètres Python peuvent-elles utiliser des chaînes?
Apr 01, 2025 pm 08:39 PM
Utilisation alternative des annotations des paramètres Python Dans la programmation Python, les annotations des paramètres sont une fonction très utile qui peut aider les développeurs à mieux comprendre et utiliser les fonctions ...
 Python multiplateform de bureau de bureau de bureau: quelle bibliothèque GUI est la meilleure pour vous?
Apr 01, 2025 pm 05:24 PM
Python multiplateform de bureau de bureau de bureau: quelle bibliothèque GUI est la meilleure pour vous?
Apr 01, 2025 pm 05:24 PM
Choix de la bibliothèque de développement d'applications de bureau multiplateforme Python De nombreux développeurs Python souhaitent développer des applications de bureau pouvant s'exécuter sur Windows et Linux Systems ...
 Pourquoi mon code ne peut-il pas faire renvoyer les données par l'API? Comment résoudre ce problème?
Apr 01, 2025 pm 08:09 PM
Pourquoi mon code ne peut-il pas faire renvoyer les données par l'API? Comment résoudre ce problème?
Apr 01, 2025 pm 08:09 PM
Pourquoi mon code ne peut-il pas faire renvoyer les données par l'API? En programmation, nous rencontrons souvent le problème du retour des valeurs nulles lorsque l'API appelle, ce qui n'est pas seulement déroutant ...
 Comment Uvicorn écoute-t-il en permanence les demandes HTTP sans servir_forever ()?
Apr 01, 2025 pm 10:51 PM
Comment Uvicorn écoute-t-il en permanence les demandes HTTP sans servir_forever ()?
Apr 01, 2025 pm 10:51 PM
Comment Uvicorn écoute-t-il en permanence les demandes HTTP? Uvicorn est un serveur Web léger basé sur ASGI. L'une de ses fonctions principales est d'écouter les demandes HTTP et de procéder ...
 Comment les scripts Python effacent-ils la sortie en position de curseur à un emplacement spécifique?
Apr 01, 2025 pm 11:30 PM
Comment les scripts Python effacent-ils la sortie en position de curseur à un emplacement spécifique?
Apr 01, 2025 pm 11:30 PM
Comment les scripts Python effacent-ils la sortie en position de curseur à un emplacement spécifique? Lors de l'écriture de scripts Python, il est courant d'effacer la sortie précédente à la position du curseur ...
 Google et AWS fournissent-ils des sources publiques d'image PYPI?
Apr 01, 2025 pm 05:15 PM
Google et AWS fournissent-ils des sources publiques d'image PYPI?
Apr 01, 2025 pm 05:15 PM
De nombreux développeurs s'appuient sur PYPI (PythonPackageIndex) ...
