
 Périphériques technologiques
IA
Comment les caméras et le lidar sont-ils calibrés ? Un aperçu de tous les outils d'étalonnage courants de l'industrie
Périphériques technologiques
IA
Comment les caméras et le lidar sont-ils calibrés ? Un aperçu de tous les outils d'étalonnage courants de l'industrie
Comment les caméras et le lidar sont-ils calibrés ? Un aperçu de tous les outils d'étalonnage courants de l'industrie

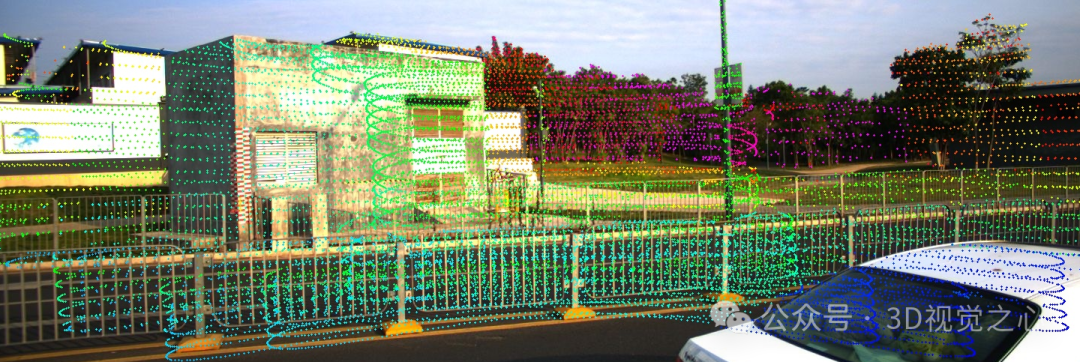
L'étalonnage des caméras et du lidar est un travail de base crucial dans de nombreuses tâches. La précision de l'étalonnage affecte directement la limite supérieure de l'effet de la fusion ultérieure de la solution. Étant donné que de nombreuses entreprises de conduite autonome et de robotique investissent beaucoup de main-d'œuvre et de ressources matérielles pour améliorer continuellement la précision de l'étalonnage, nous allons vous présenter aujourd'hui quelques boîtes à outils d'étalonnage Caméra-Lidar courantes, et nous vous recommandons de les collecter !
1.Libcbdetect
Détection de damiers multiples en un seul coup : https://www.cvlibs.net/software/libcbdetect/
L'algorithme écrit à l'aide de MATLAB peut automatiquement extraire les points d'angle et les rendre précis au sous-pixel level et combinez ces points d’angle dans un motif en damier rectangulaire. Cet algorithme a la capacité de traiter différents types d’images (telles que les caméras sténopé, les caméras fisheye, les caméras panoramiques).

2. Package d'étalonnage Autoware
Kit d'outils d'étalonnage de caméra lidar avec cadre Autoware.
Lien : https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
3. Calibrage de la cible basé sur la correspondance 3D-3D
Lidar basé sur la correspondance de points 3D-3D Calibrage de la caméra. , package ROS, tiré de l'article « Calibration LiDAR-Camera utilisant des correspondances de points 3D-3D » !
Lien : https://github.com/ankitdhall/lidar_camera_calibration
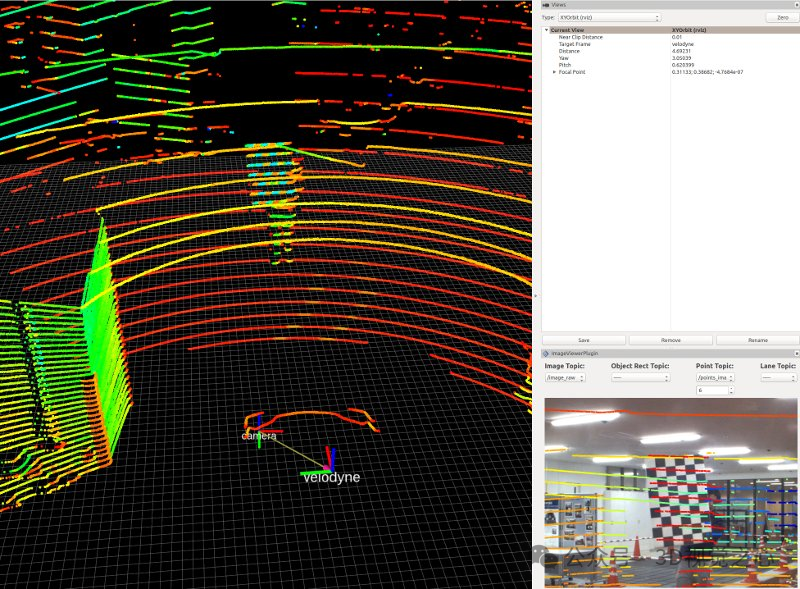
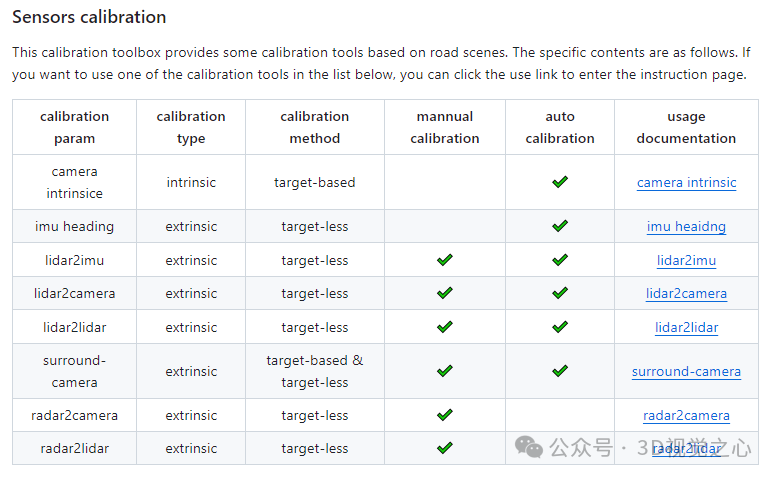
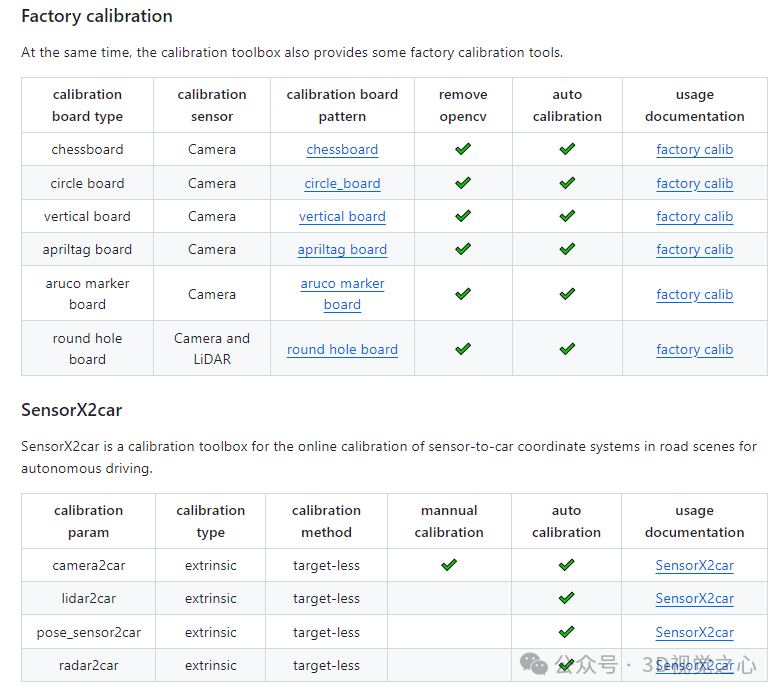
4. Shanghai AI Lab OpenCalib
Produit par le laboratoire d'intelligence artificielle de Shanghai, OpenCalib fournit une boîte à outils d'étalonnage de capteurs. La boîte à outils peut être utilisée pour calibrer des capteurs tels que l'IMU, le lidar, la caméra et le radar.
Lien : https://github.com/PJLab-ADG/SensorsCalibration
5.Outil d'étalonnage Apollo
Boîte à outils d'étalonnage Apollo, lien : https://github.com/ApolloAuto / apollo/tree/master/modules/calibration
6.Outil d'étalonnage de la caméra Livox
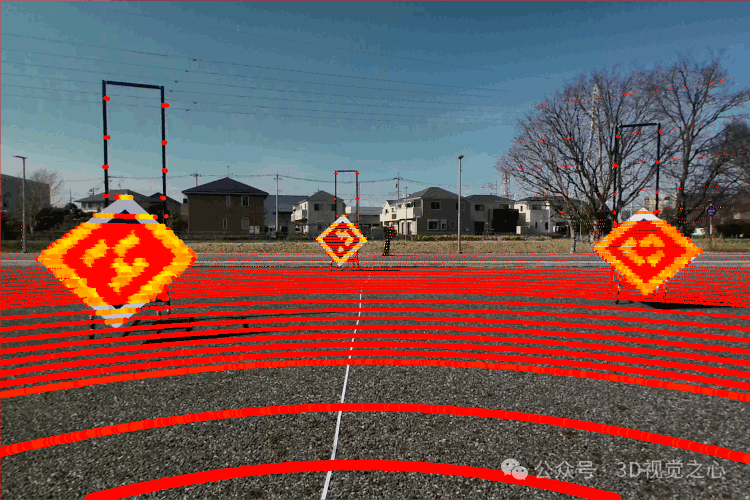
Cette solution fournit une méthode pour calibrer manuellement les paramètres externes entre le radar Livox et la caméra. Elle a été utilisée dans Mid-40, Horizon et. Télé Vérifié le -15. Il comprend des codes liés au calcul des paramètres internes de la caméra, à l'obtention des données d'étalonnage, à l'optimisation du calcul des paramètres externes et aux applications de fusion de caméras radar. Dans cette solution, les points d'angle de la plaque d'étalonnage sont utilisés comme cible d'étalonnage. En raison des caractéristiques de balayage non répétitives du radar Livox, la densité du nuage de points est relativement grande, ce qui facilite la recherche de la position précise de. les points d'angle dans le nuage de points radar. L'étalonnage et la fusion des caméras radar peuvent également donner de bons résultats.
Lien : https://github.com/Livox-SDK/livox_camera_lidar_calibration
Documentation chinoise : https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/README_cn.md
7.CalibrationTools
CalibrationTools fournit des outils d'étalonnage pour le lidar-lidar, la caméra lidar et d'autres paires de capteurs. En plus de cela, sont également fournis :
1) Positionnement - L'outil d'estimation du biais estime les paramètres des capteurs utilisés pour l'estime (IMU et odométrie) pour de meilleures performances de positionnement !
2) Outils de visualisation et d'analyse pour la sortie du contrôle Autoware ;
3) Outils d'étalonnage pour corriger les retards de commande des véhicules
Lien : https://github.com/tier4/CalibrationTools
8.
La propre boîte à outils de Matlab prend en charge l'étalonnage du lidar et des caméras, lien : https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html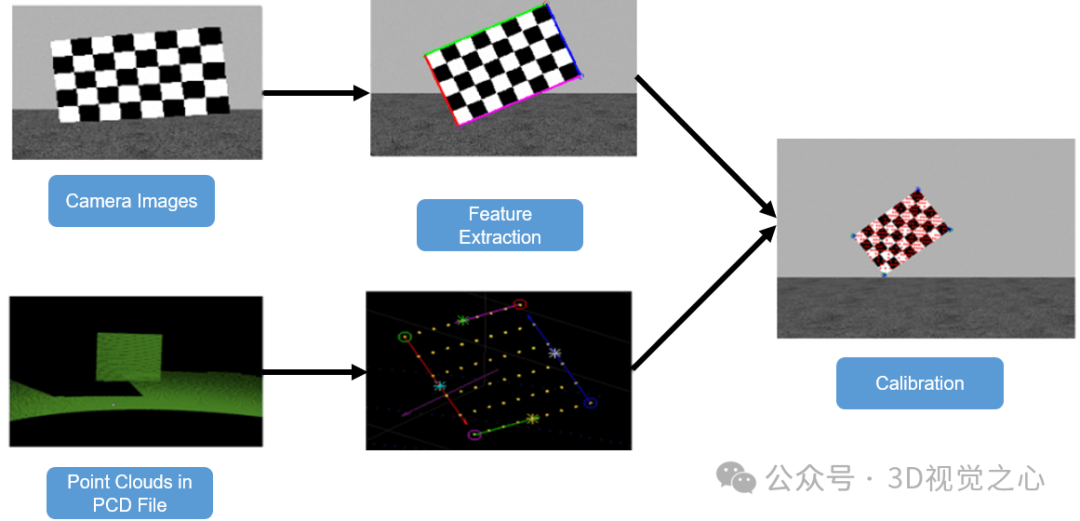
9.ROS calibration outil
Pack d'étalonnage LIDAR de la caméra ROS, lien : https://github.com/heethesh/lidar_camera_calibration
10. Calibrage visuel direct du lidar
Ce package fournit une boîte à outils pour le calibrage de la caméra lidar : Universel : Il peut gérer divers modèles de projection de lidar et de caméra, y compris le lidar à rotation et à balayage non répétitif, ainsi que caméras de projection sténopé, fisheye et omnidirectionnelles. Sans cible : Il ne nécessite pas de cibles d'étalonnage, mais utilise des structures et des textures d'environnement pour l'étalonnage. Prise unique : Le calibrage ne nécessite qu'au moins une paire de nuages de points lidar et d'images de caméra. En option, plusieurs paires de données de caméra lidar peuvent être utilisées pour améliorer la précision. Automatique : Le processus d'étalonnage est automatique et ne nécessite aucune estimation initiale. Précis et robuste :Il adopte un algorithme d'enregistrement de caméra lidar direct au niveau des pixels, qui est plus robuste et précis que l'enregistrement de caméra lidar indirect basé sur les bords.
Lien : https://github.com/koide3/direct_visual_lidar_calibration
Boîte à outils de caméra lidar 11.2D
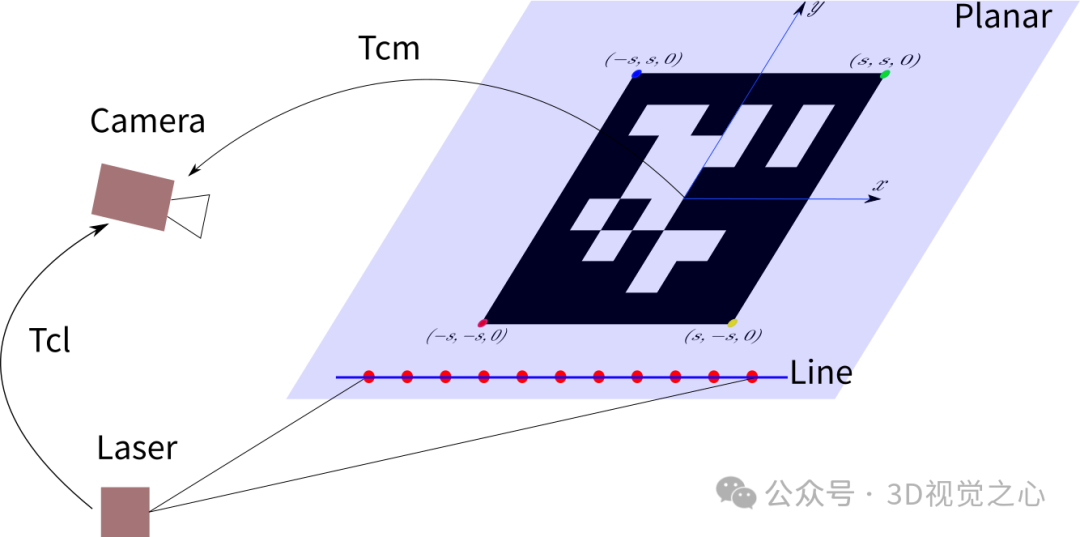
Il s'agit d'un code d'étalonnage automatique basé sur ROS pour les paramètres externes du laser et de la caméra à ligne unique. Le principe d'étalonnage est illustré dans la figure ci-dessous. La caméra estime l'équation du plan de la plaque d'étalonnage dans le système de coordonnées de la caméra via le code QR. Étant donné que le nuage de points laser tombe sur le plan, le nuage de points est converti en paramètres externes. du système de coordonnées de la caméra via le système de coordonnées laser. Dans le système de coordonnées de la caméra, la distance entre le point construit et le plan est utilisée comme erreur, qui est résolue à l'aide des moindres carrés non linéaires.
Lien : https://github.com/MegviiRobot/CamLaserCalibraTool
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Comment optimiser les performances de Debian Readdir
Apr 13, 2025 am 08:48 AM
Comment optimiser les performances de Debian Readdir
Apr 13, 2025 am 08:48 AM
Dans Debian Systems, les appels du système ReadDir sont utilisés pour lire le contenu des répertoires. Si ses performances ne sont pas bonnes, essayez la stratégie d'optimisation suivante: simplifiez le nombre de fichiers d'annuaire: divisez les grands répertoires en plusieurs petits répertoires autant que possible, en réduisant le nombre d'éléments traités par appel ReadDir. Activer la mise en cache de contenu du répertoire: construire un mécanisme de cache, mettre à jour le cache régulièrement ou lorsque le contenu du répertoire change et réduire les appels fréquents à Readdir. Les caches de mémoire (telles que Memcached ou Redis) ou les caches locales (telles que les fichiers ou les bases de données) peuvent être prises en compte. Adoptez une structure de données efficace: si vous implémentez vous-même la traversée du répertoire, sélectionnez des structures de données plus efficaces (telles que les tables de hachage au lieu de la recherche linéaire) pour stocker et accéder aux informations du répertoire
 Comment Debian Readdir s'intègre à d'autres outils
Apr 13, 2025 am 09:42 AM
Comment Debian Readdir s'intègre à d'autres outils
Apr 13, 2025 am 09:42 AM
La fonction ReadDir dans le système Debian est un appel système utilisé pour lire le contenu des répertoires et est souvent utilisé dans la programmation C. Cet article expliquera comment intégrer ReadDir avec d'autres outils pour améliorer sa fonctionnalité. Méthode 1: combinant d'abord le programme de langue C et le pipeline, écrivez un programme C pour appeler la fonction readdir et sortir le résultat: # include # include # include # includeIntmain (intargc, char * argv []) {dir * dir; structDirent * entrée; if (argc! = 2) {
 Comment Debian améliore la vitesse de traitement des données Hadoop
Apr 13, 2025 am 11:54 AM
Comment Debian améliore la vitesse de traitement des données Hadoop
Apr 13, 2025 am 11:54 AM
Cet article examine comment améliorer l'efficacité du traitement des données Hadoop sur les systèmes Debian. Les stratégies d'optimisation couvrent les mises à niveau matérielle, les ajustements des paramètres du système d'exploitation, les modifications de configuration de Hadoop et l'utilisation d'algorithmes et d'outils efficaces. 1. Le renforcement des ressources matérielles garantit que tous les nœuds ont des configurations matérielles cohérentes, en particulier en faisant attention aux performances du CPU, de la mémoire et de l'équipement réseau. Le choix des composants matériels de haute performance est essentiel pour améliorer la vitesse de traitement globale. 2. Réglage des paramètres JVM: Ajustez dans le fichier hadoop-env.sh
 Comment utiliser les journaux Nginx pour améliorer la vitesse du site Web
Apr 13, 2025 am 09:09 AM
Comment utiliser les journaux Nginx pour améliorer la vitesse du site Web
Apr 13, 2025 am 09:09 AM
L'optimisation des performances du site Web est inséparable à partir d'une analyse approfondie des journaux d'accès. Le journal Nginx enregistre les informations détaillées des utilisateurs visitant le site Web. L'utilisation intelligente de ces données peut efficacement améliorer la vitesse du site Web. Cet article présentera plusieurs méthodes d'optimisation des performances du site Web basées sur les journaux Nginx. 1. Analyse et optimisation du comportement des utilisateurs. En analysant le journal NGINX, nous pouvons acquérir une compréhension approfondie du comportement des utilisateurs et faire une optimisation ciblée en fonction de ceci: Identification IP d'accès à haute fréquence: Trouvez l'adresse IP avec la fréquence d'accès la plus élevée, et optimiser la configuration des ressources du serveur pour ces adresses IP, telles que l'augmentation de la bande passante ou l'amélioration de la vitesse de réponse du contenu spécifique. Analyse du code d'état: analyser la fréquence des différents codes d'état HTTP (tels que 404 erreurs), trouver des problèmes dans la navigation du site Web ou la gestion du contenu et procéder
 Comment apprendre Debian Syslog
Apr 13, 2025 am 11:51 AM
Comment apprendre Debian Syslog
Apr 13, 2025 am 11:51 AM
Ce guide vous guidera pour apprendre à utiliser Syslog dans Debian Systems. Syslog est un service clé dans les systèmes Linux pour les messages du système de journalisation et du journal d'application. Il aide les administrateurs à surveiller et à analyser l'activité du système pour identifier et résoudre rapidement les problèmes. 1. Connaissance de base de Syslog Les fonctions principales de Syslog comprennent: la collecte et la gestion des messages journaux de manière centralisée; Prise en charge de plusieurs formats de sortie de journal et des emplacements cibles (tels que les fichiers ou les réseaux); Fournir des fonctions de visualisation et de filtrage des journaux en temps réel. 2. Installer et configurer syslog (en utilisant RSYSLOG) Le système Debian utilise RSYSLOG par défaut. Vous pouvez l'installer avec la commande suivante: SudoaptupDatesud
 Comment recycler des packages qui ne sont plus utilisés
Apr 13, 2025 am 08:51 AM
Comment recycler des packages qui ne sont plus utilisés
Apr 13, 2025 am 08:51 AM
Cet article décrit comment nettoyer les packages logiciels inutiles et libérer l'espace disque dans le système Debian. Étape 1: Mettez à jour la liste des packages Assurez-vous que votre liste de packages est à jour: SudoaptupDate Étape 2: Afficher les packages installés Utilisez la commande suivante pour afficher tous les packages installés: DPKG - GETT-Selections | Grep-Vdeinstall Étape 3: Identifier les packages de redondance Utilisez l'outil d'aptitude pour trouver des packages qui ne sont plus nécessaires. L'aptitude fournira des suggestions pour vous aider à supprimer en toute sécurité les packages: SudoaptitudEsearch '~ Pimportant' Cette commande répertorie les balises
 Comment Debian OpenSSL empêche les attaques de l'homme au milieu
Apr 13, 2025 am 10:30 AM
Comment Debian OpenSSL empêche les attaques de l'homme au milieu
Apr 13, 2025 am 10:30 AM
Dans Debian Systems, OpenSSL est une bibliothèque importante pour le chiffrement, le décryptage et la gestion des certificats. Pour empêcher une attaque d'homme dans le milieu (MITM), les mesures suivantes peuvent être prises: utilisez HTTPS: assurez-vous que toutes les demandes de réseau utilisent le protocole HTTPS au lieu de HTTP. HTTPS utilise TLS (Protocole de sécurité de la couche de transport) pour chiffrer les données de communication pour garantir que les données ne sont pas volées ou falsifiées pendant la transmission. Vérifiez le certificat de serveur: vérifiez manuellement le certificat de serveur sur le client pour vous assurer qu'il est digne de confiance. Le serveur peut être vérifié manuellement via la méthode du délégué d'URLSession
 Méthode d'installation du certificat de Debian Mail Server SSL
Apr 13, 2025 am 11:39 AM
Méthode d'installation du certificat de Debian Mail Server SSL
Apr 13, 2025 am 11:39 AM
Les étapes pour installer un certificat SSL sur le serveur de messagerie Debian sont les suivantes: 1. Installez d'abord la boîte à outils OpenSSL, assurez-vous que la boîte à outils OpenSSL est déjà installée sur votre système. Si ce n'est pas installé, vous pouvez utiliser la commande suivante pour installer: Sudoapt-getUpDaSuDoapt-getInstallOpenSSL2. Générer la clé privée et la demande de certificat Suivant, utilisez OpenSSL pour générer une clé privée RSA 2048 bits et une demande de certificat (RSE): OpenSS
