
 Périphériques technologiques
IA
Le repérage des nuages de points est incontournable pour la vision 3D ! Comprendre toutes les solutions et défis courants dans un seul article
Périphériques technologiques
IA
Le repérage des nuages de points est incontournable pour la vision 3D ! Comprendre toutes les solutions et défis courants dans un seul article
Le repérage des nuages de points est incontournable pour la vision 3D ! Comprendre toutes les solutions et défis courants dans un seul article

Le nuage de points en tant qu'ensemble de points devrait entraîner un changement dans l'obtention et la génération d'informations de surface tridimensionnelles (3D) d'objets grâce à la reconstruction 3D, à l'inspection industrielle et au fonctionnement de robots. Le processus le plus difficile mais essentiel est l'enregistrement des nuages de points, c'est-à-dire l'obtention d'une transformation spatiale qui aligne et fait correspondre deux nuages de points obtenus dans deux coordonnées différentes. Cette revue présente la vue d'ensemble et les principes de base de l'enregistrement des nuages de points, classe et compare systématiquement diverses méthodes et résout les problèmes techniques existant dans l'enregistrement des nuages de points, en essayant de fournir aux chercheurs universitaires en dehors du domaine et aux ingénieurs des conseils et faciliter les discussions sur une vision unifiée. pour l'enregistrement des nuages de points.
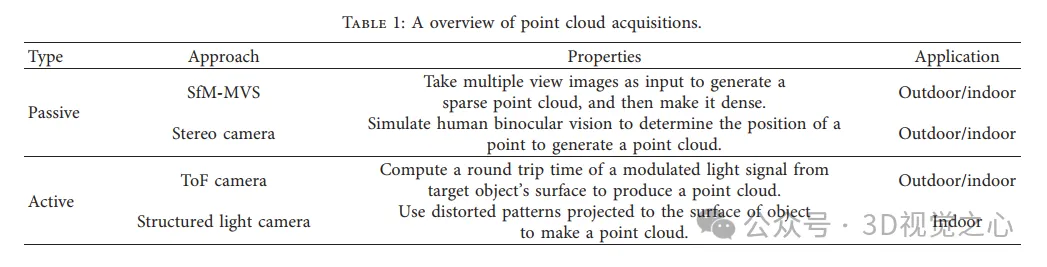
La méthode générale d'acquisition de nuages de points
est divisée en méthodes actives et passives. Le nuage de points activement acquis par le capteur est la méthode active, et la méthode par reconstruction à un stade ultérieur est la méthode passive.
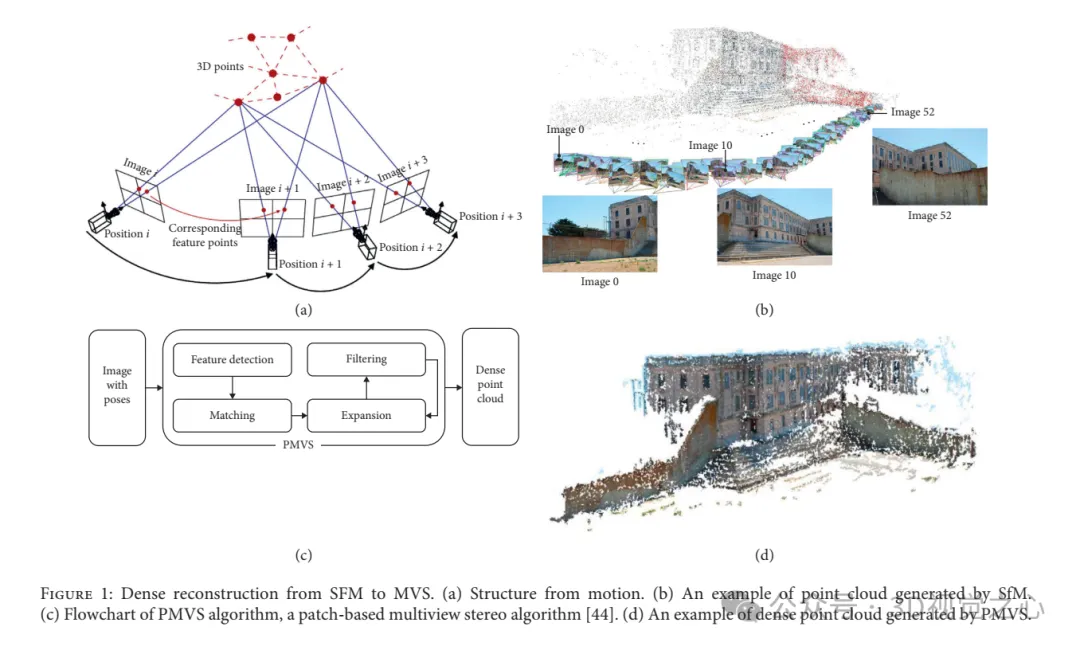
Reconstruction dense de SFM à MVS. (a) GFD. (b) Exemple de nuage de points généré par SfM. (c) Organigramme de l'algorithme PMVS, un algorithme stéréo multi-vues basé sur des correctifs. (d) Exemple de nuage de points dense généré par PMVS.
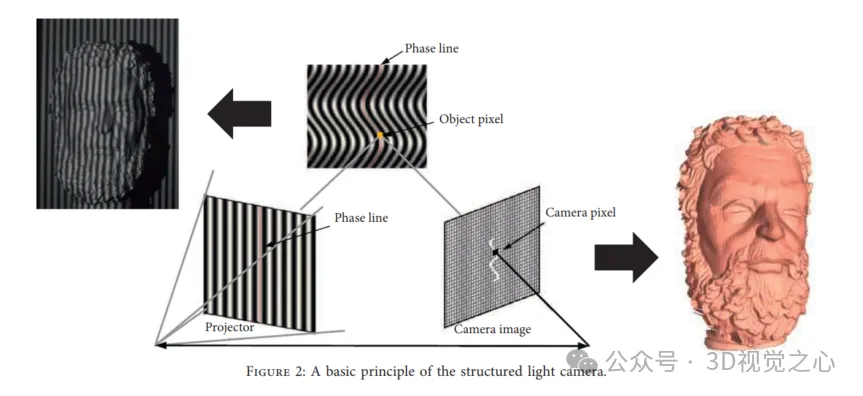
Méthodes de reconstruction de lumière structurée :
inscription rigide et inscription non rigide
Dans un environnement, la transformation peut être décomposée en rotation et translation Après une transformation rigide appropriée, un nuage de points est mappé sur. un autre nuage de points tout en conservant la même forme et la même taille.
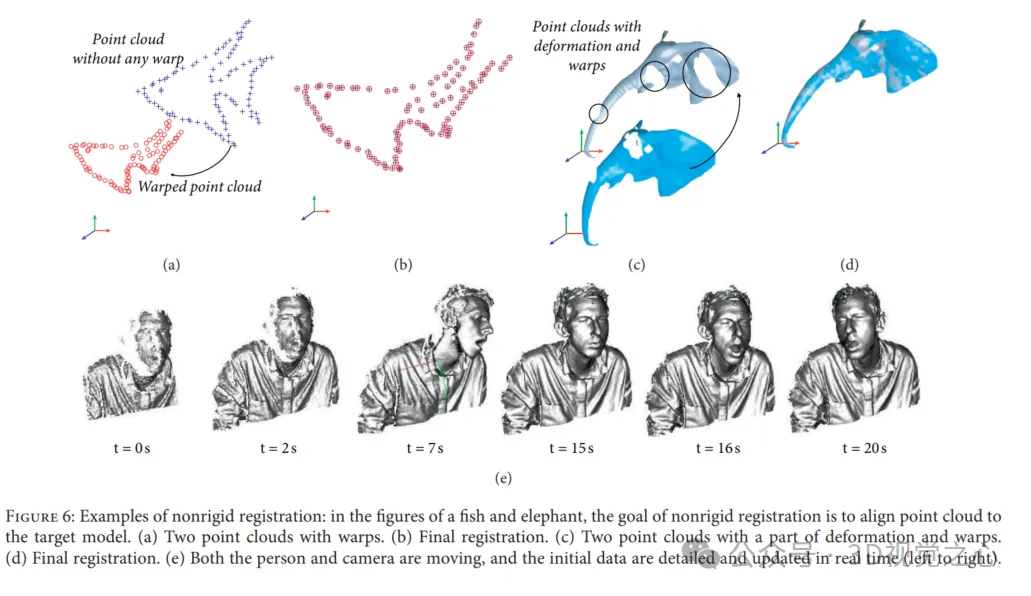
En recalage non rigide, une transformation non rigide est établie pour envelopper les données numérisées dans le nuage de points cible. Les transformations non rigides incluent les réflexions, les rotations, la mise à l'échelle et les traductions, par opposition aux seules traductions et rotations dans le repérage rigide. L'enregistrement non rigide est utilisé pour deux raisons principales : (1) les non-linéarités et les erreurs d'étalonnage dans l'acquisition des données peuvent provoquer une distorsion basse fréquence des numérisations d'objets rigides ; (2) l'enregistrement est effectué sur des scènes ou des objets qui changent de forme et se déplacent au fil du temps ; .
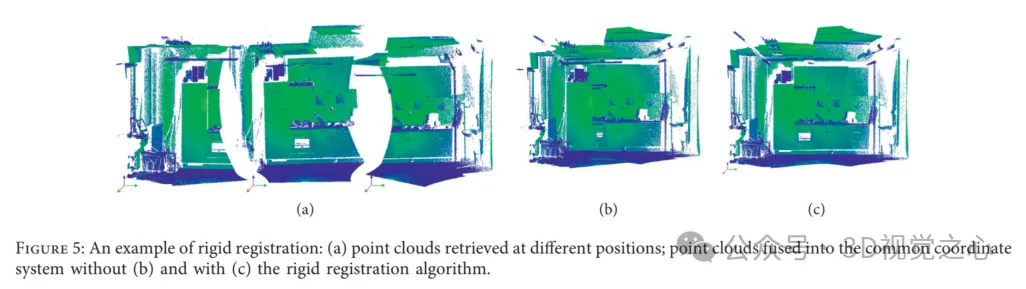
Exemples de recalage rigide : (a) deux nuages de points : nuage de points de lecture (vert) et nuage de points de référence (rouge) ; sans (b) et avec (c) cas d'algorithme de recalage rigide, les nuages de points sont fusionnés ; dans un système de coordonnées commun.
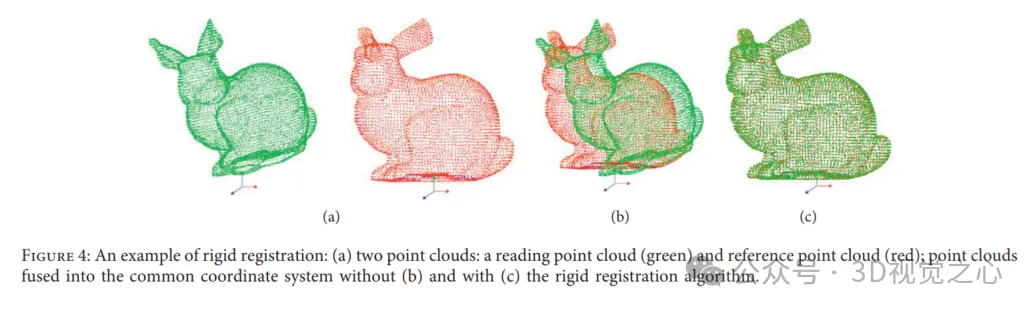
Cependant, les performances de l'enregistrement des nuages de points sont limitées par le chevauchement des variantes, le bruit et les valeurs aberrantes, le coût de calcul élevé et divers indicateurs de réussite de l'enregistrement.
Quelles sont les modalités d'inscription ?
Au cours des dernières décennies, de plus en plus de méthodes d'enregistrement de nuages de points ont été proposées, depuis les algorithmes ICP classiques jusqu'aux solutions combinées à la technologie de deep learning.
1) Schéma ICP
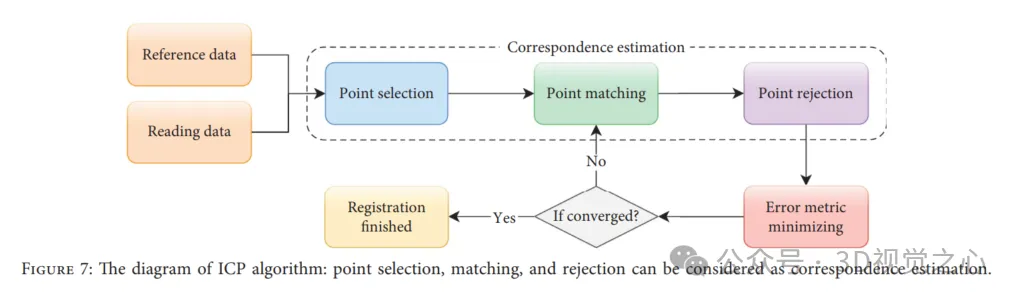
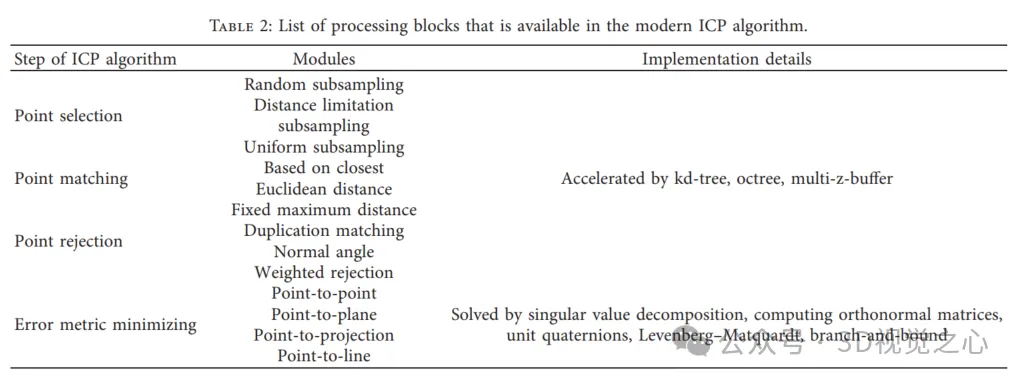
L'algorithme ICP est un algorithme itératif qui peut garantir la précision, la vitesse de convergence et la stabilité de l'enregistrement dans des conditions idéales. Dans un sens, ICP peut être considéré comme un problème de maximisation des attentes (EM), il calcule et met donc à jour de nouvelles transformations basées sur des correspondances, qui sont ensuite appliquées aux données lues jusqu'à ce que la métrique d'erreur converge. Cependant, cela ne garantit pas que l'ICP atteigne l'optimum global. L'algorithme ICP peut être grossièrement divisé en quatre étapes : sélection des points, correspondance des points, rejet des points et minimisation des métriques d'erreur, comme le montre la figure ci-dessous.
2) Méthodes basées sur les fonctionnalités
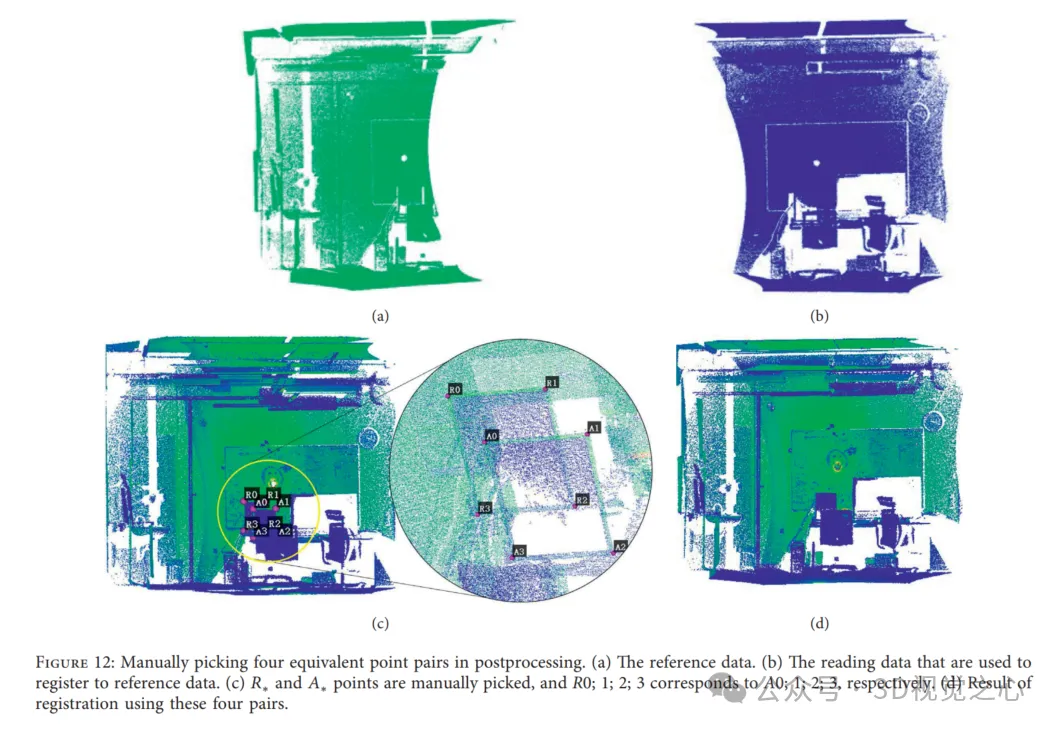
Comme nous l'avons vu dans les algorithmes basés sur ICP, il est crucial d'établir une correspondance avant l'estimation de la transformation. Le résultat final est garanti si l'on obtient une correspondance appropriée décrivant la relation correcte entre les deux nuages de points. Par conséquent, nous pouvons coller des points de repère sur la cible numérisée, ou sélectionner manuellement des paires de points équivalentes en post-traitement pour calculer la transformation des points d'intérêt (points sélectionnés), qui peut finalement être appliquée pour lire le nuage de points. Comme le montre la figure 12(c), les nuages de points sont chargés dans le même système de coordonnées et dessinés dans des couleurs différentes. Les figures 12(a) et 12(b) montrent deux nuages de points capturés à différents points de vue, avec des paires de points sélectionnées respectivement à partir des données de référence et des données lues, et les résultats d'enregistrement sont présentés sur la figure 12(d). Cependant, ces méthodes ne sont ni adaptées aux objets de mesure auxquels aucun repère n’est attaché, ni applicables aux applications nécessitant un enregistrement automatique. Dans le même temps, afin de minimiser l'espace de recherche des correspondances et d'éviter de supposer des transformations initiales dans les algorithmes basés sur l'ICP, un enregistrement basé sur les caractéristiques est introduit, dans lequel les points clés conçus par les chercheurs sont extraits. Habituellement, la détection des points clés et l’établissement de la correspondance sont les principales étapes de cette méthode.
Les méthodes courantes d'extraction de points clés incluent PFH, SHOT, etc. Il est également important de concevoir un algorithme pour supprimer les valeurs aberrantes et estimer efficacement la transformation basée sur les valeurs internes.
3) Approches basées sur l'apprentissage
Dans les applications qui utilisent des nuages de points comme entrée, les stratégies traditionnelles d'estimation des descripteurs de caractéristiques s'appuient fortement sur les propriétés géométriques uniques des objets dans le nuage de points. Cependant, les données du monde réel sont souvent spécifiques à une cible et peuvent contenir des avions, des valeurs aberrantes et du bruit. De plus, les disparités supprimées contiennent souvent des informations utiles qui peuvent être utilisées pour l’apprentissage. Les techniques basées sur l'apprentissage peuvent être adaptées pour coder des informations sémantiques et peuvent être généralisées à des tâches spécifiques. La plupart des stratégies d'enregistrement intégrées aux techniques d'apprentissage automatique sont plus rapides et plus robustes que les méthodes classiques, et s'étendent de manière flexible à d'autres tâches telles que l'estimation de la pose d'objets et la classification d'objets. De même, un défi clé dans l’enregistrement des nuages de points basé sur l’apprentissage est de savoir comment extraire des caractéristiques invariantes par rapport à la variation spatiale du nuage de points et plus robustes au bruit et aux valeurs aberrantes.
Les représentants des méthodes basées sur l'apprentissage sont : PointNet, PointNet++, PCRNet, Deep Global Registration, Deep Closest Point, Partial Registration Network, Robust Point Matching, PointNetLK, 3DRegNet.
4) Méthode avec fonction de densité de probabilité
L'enregistrement des nuages de points basé sur la fonction de densité de probabilité (PDF) fait de l'enregistrement à l'aide de modèles statistiques un problème bien étudié. L'idée clé de cette méthode est d'utiliser des fonctions de densité de probabilité spécifiques. représentent les données, telles que le modèle de mélange gaussien (GMM) et la distribution normale (ND). La tâche d'enregistrement est reformulée comme un problème d'alignement de deux distributions correspondantes, suivi d'une fonction objectif qui mesure et minimise la différence statistique entre elles. Dans le même temps, grâce à la représentation du PDF, le nuage de points peut être considéré comme une distribution plutôt que comme plusieurs points individuels, il évite donc l'estimation de la correspondance et a de bonnes performances anti-bruit, mais est généralement plus lent que celui basé sur ICP. méthodes.
5) Autres méthodes
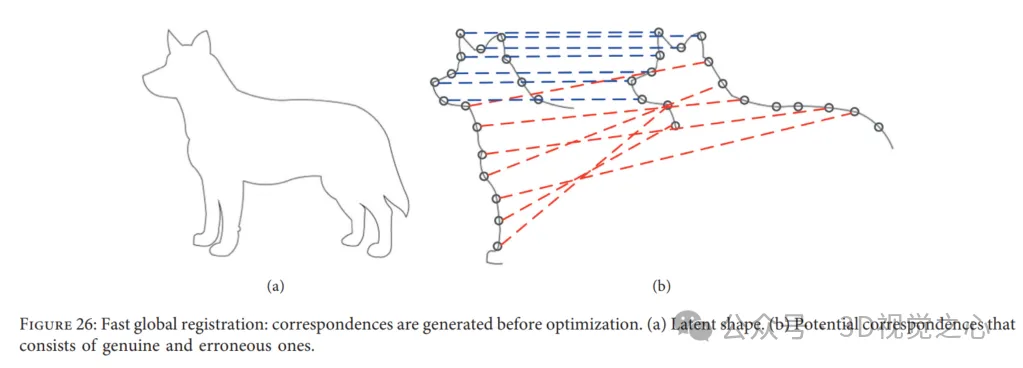
Inscription globale rapide. Fast Global Registration (FGR) fournit une stratégie rapide pour l’enregistrement des nuages de points qui ne nécessite aucune initialisation. Plus précisément, FGR opère sur les correspondances candidates de la surface couverte et n'effectue pas de mises à jour de correspondance ni de requêtes de points les plus proches. La particularité de cette approche est qu'elle peut être produite directement par une seule optimisation d'un objectif robuste densément défini sur la surface. inscription. Cependant, les méthodes existantes pour résoudre l'enregistrement des nuages de points génèrent généralement des correspondances candidates ou multiples entre deux nuages de points, puis calculent et mettent à jour les résultats globaux. De plus, dans le recalage global rapide, la correspondance est établie immédiatement lors de l'optimisation et n'est pas réestimée dans les étapes suivantes. Par conséquent, les recherches coûteuses du voisin le plus proche sont évitées afin de maintenir les coûts de calcul à un faible niveau. En conséquence, un traitement linéaire pour chaque correspondance en étapes itératives et un système linéaire d’estimation de pose sont efficaces. FGR est évalué sur plusieurs ensembles de données, tels que le benchmark UWA et Stanford Bunny, par rapport à l'ICP point à point et point-top, ainsi qu'aux variantes d'ICP telles que Go ICP. Les expériences montrent que FGR fonctionne bien en présence de bruit !
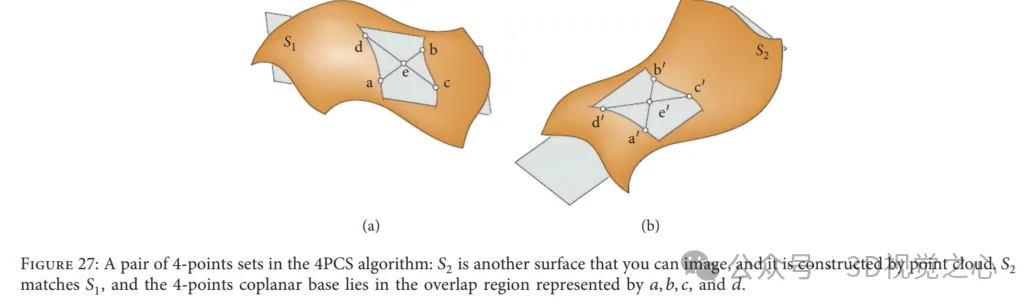
Algorithme d'ensemble congruent à quatre points : un ensemble congruent à 4 points (4PCS) fournit une transformation initiale pour la lecture des données sans hypothèses de position de départ. Généralement, une transformation d'alignement rigide entre deux nuages de points peut être définie de manière unique par une paire de triplets, l'un à partir des données de référence et l'autre à partir des données lues. Cependant, dans cette méthode, il recherche des bases spéciales à 4 points, c'est-à-dire 4 points congrus coplanaires dans chaque nuage de points, en recherchant dans un petit ensemble de potentiels, comme le montre la figure 27. Résoudre la transformation rigide optimale dans le problème du plus grand ensemble de points communs (LCP). Cet algorithme atteint des performances proches lorsque le chevauchement des nuages de points appariés est faible et que des valeurs aberrantes sont présentes. Afin de s’adapter aux différentes applications, de nombreux chercheurs ont introduit des travaux plus importants liés à la solution classique 4PCS.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Écrit ci-dessus et compréhension personnelle de l'auteur Le Gaussiansplatting tridimensionnel (3DGS) est une technologie transformatrice qui a émergé dans les domaines des champs de rayonnement explicites et de l'infographie ces dernières années. Cette méthode innovante se caractérise par l’utilisation de millions de gaussiennes 3D, ce qui est très différent de la méthode du champ de rayonnement neuronal (NeRF), qui utilise principalement un modèle implicite basé sur les coordonnées pour mapper les coordonnées spatiales aux valeurs des pixels. Avec sa représentation explicite de scènes et ses algorithmes de rendu différenciables, 3DGS garantit non seulement des capacités de rendu en temps réel, mais introduit également un niveau de contrôle et d'édition de scène sans précédent. Cela positionne 3DGS comme un révolutionnaire potentiel pour la reconstruction et la représentation 3D de nouvelle génération. À cette fin, nous fournissons pour la première fois un aperçu systématique des derniers développements et préoccupations dans le domaine du 3DGS.
 En savoir plus sur les emojis 3D Fluent dans Microsoft Teams
Apr 24, 2023 pm 10:28 PM
En savoir plus sur les emojis 3D Fluent dans Microsoft Teams
Apr 24, 2023 pm 10:28 PM
N'oubliez pas, surtout si vous êtes un utilisateur de Teams, que Microsoft a ajouté un nouveau lot d'émojis 3DFluent à son application de visioconférence axée sur le travail. Après que Microsoft a annoncé des emojis 3D pour Teams et Windows l'année dernière, le processus a en fait permis de mettre à jour plus de 1 800 emojis existants pour la plate-forme. Cette grande idée et le lancement de la mise à jour des emoji 3DFluent pour les équipes ont été promus pour la première fois via un article de blog officiel. La dernière mise à jour de Teams apporte FluentEmojis à l'application. Microsoft affirme que les 1 800 emojis mis à jour seront disponibles chaque jour.
 Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
0. Écrit à l'avant&& Compréhension personnelle que les systèmes de conduite autonome s'appuient sur des technologies avancées de perception, de prise de décision et de contrôle, en utilisant divers capteurs (tels que caméras, lidar, radar, etc.) pour percevoir l'environnement et en utilisant des algorithmes et des modèles pour une analyse et une prise de décision en temps réel. Cela permet aux véhicules de reconnaître les panneaux de signalisation, de détecter et de suivre d'autres véhicules, de prédire le comportement des piétons, etc., permettant ainsi de fonctionner en toute sécurité et de s'adapter à des environnements de circulation complexes. Cette technologie attire actuellement une grande attention et est considérée comme un domaine de développement important pour l'avenir des transports. . un. Mais ce qui rend la conduite autonome difficile, c'est de trouver comment faire comprendre à la voiture ce qui se passe autour d'elle. Cela nécessite que l'algorithme de détection d'objets tridimensionnels du système de conduite autonome puisse percevoir et décrire avec précision les objets dans l'environnement, y compris leur emplacement,
 Au-delà d'ORB-SLAM3 ! SL-SLAM : les scènes de faible luminosité, de gigue importante et de texture faible sont toutes gérées
May 30, 2024 am 09:35 AM
Au-delà d'ORB-SLAM3 ! SL-SLAM : les scènes de faible luminosité, de gigue importante et de texture faible sont toutes gérées
May 30, 2024 am 09:35 AM
Écrit précédemment, nous discutons aujourd'hui de la manière dont la technologie d'apprentissage profond peut améliorer les performances du SLAM (localisation et cartographie simultanées) basé sur la vision dans des environnements complexes. En combinant des méthodes d'extraction de caractéristiques approfondies et de correspondance de profondeur, nous introduisons ici un système SLAM visuel hybride polyvalent conçu pour améliorer l'adaptation dans des scénarios difficiles tels que des conditions de faible luminosité, un éclairage dynamique, des zones faiblement texturées et une gigue importante. Notre système prend en charge plusieurs modes, notamment les configurations étendues monoculaire, stéréo, monoculaire-inertielle et stéréo-inertielle. En outre, il analyse également comment combiner le SLAM visuel avec des méthodes d’apprentissage profond pour inspirer d’autres recherches. Grâce à des expériences approfondies sur des ensembles de données publiques et des données auto-échantillonnées, nous démontrons la supériorité du SL-SLAM en termes de précision de positionnement et de robustesse du suivi.
 CLIP-BEVFormer : superviser explicitement la structure BEVFormer pour améliorer les performances de détection à longue traîne
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer : superviser explicitement la structure BEVFormer pour améliorer les performances de détection à longue traîne
Mar 26, 2024 pm 12:41 PM
Écrit ci-dessus et compréhension personnelle de l'auteur : À l'heure actuelle, dans l'ensemble du système de conduite autonome, le module de perception joue un rôle essentiel. Le véhicule autonome roulant sur la route ne peut obtenir des résultats de perception précis que via le module de perception en aval. dans le système de conduite autonome, prend des jugements et des décisions comportementales opportuns et corrects. Actuellement, les voitures dotées de fonctions de conduite autonome sont généralement équipées d'une variété de capteurs d'informations de données, notamment des capteurs de caméra à vision panoramique, des capteurs lidar et des capteurs radar à ondes millimétriques pour collecter des informations selon différentes modalités afin d'accomplir des tâches de perception précises. L'algorithme de perception BEV basé sur la vision pure est privilégié par l'industrie en raison de son faible coût matériel et de sa facilité de déploiement, et ses résultats peuvent être facilement appliqués à diverses tâches en aval.
 Paint 3D sous Windows 11 : guide de téléchargement, d'installation et d'utilisation
Apr 26, 2023 am 11:28 AM
Paint 3D sous Windows 11 : guide de téléchargement, d'installation et d'utilisation
Apr 26, 2023 am 11:28 AM
Lorsque les rumeurs ont commencé à se répandre selon lesquelles le nouveau Windows 11 était en développement, chaque utilisateur de Microsoft était curieux de savoir à quoi ressemblerait le nouveau système d'exploitation et ce qu'il apporterait. Après de nombreuses spéculations, Windows 11 est là. Le système d'exploitation est livré avec une nouvelle conception et des modifications fonctionnelles. En plus de quelques ajouts, il s’accompagne de fonctionnalités obsolètes et supprimées. L'une des fonctionnalités qui n'existe pas dans Windows 11 est Paint3D. Bien qu'il propose toujours Paint classique, idéal pour les dessinateurs, les griffonneurs et les griffonneurs, il abandonne Paint3D, qui offre des fonctionnalités supplémentaires idéales pour les créateurs 3D. Si vous recherchez des fonctionnalités supplémentaires, nous recommandons Autodesk Maya comme le meilleur logiciel de conception 3D. comme
 Obtenez une femme virtuelle en 3D en 30 secondes avec une seule carte ! Text to 3D génère un humain numérique de haute précision avec des détails de pores clairs, se connectant de manière transparente à Maya, Unity et d'autres outils de production.
May 23, 2023 pm 02:34 PM
Obtenez une femme virtuelle en 3D en 30 secondes avec une seule carte ! Text to 3D génère un humain numérique de haute précision avec des détails de pores clairs, se connectant de manière transparente à Maya, Unity et d'autres outils de production.
May 23, 2023 pm 02:34 PM
ChatGPT a injecté une dose de sang de poulet dans l’industrie de l’IA, et tout ce qui était autrefois impensable est devenu aujourd’hui une pratique de base. Le Text-to-3D, qui continue de progresser, est considéré comme le prochain point chaud dans le domaine de l'AIGC après la diffusion (images) et le GPT (texte), et a reçu une attention sans précédent. Non, un produit appelé ChatAvatar a été mis en version bêta publique discrète, recueillant rapidement plus de 700 000 vues et attention, et a été présenté sur Spacesoftheweek. △ChatAvatar prendra également en charge la technologie Imageto3D qui génère des personnages stylisés en 3D à partir de peintures originales à perspective unique/multi-perspective générées par l'IA. Le modèle 3D généré par la version bêta actuelle a reçu une large attention.
 Les dernières nouvelles de l'Université d'Oxford ! Mickey : correspondance d'images 2D en 3D SOTA ! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Les dernières nouvelles de l'Université d'Oxford ! Mickey : correspondance d'images 2D en 3D SOTA ! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Lien du projet écrit devant : https://nianticlabs.github.io/mickey/ Étant donné deux images, la pose de la caméra entre elles peut être estimée en établissant la correspondance entre les images. En règle générale, ces correspondances sont 2D à 2D et nos poses estimées sont à échelle indéterminée. Certaines applications, telles que la réalité augmentée instantanée, à tout moment et en tout lieu, nécessitent une estimation de pose des métriques d'échelle, elles s'appuient donc sur des estimateurs de profondeur externes pour récupérer l'échelle. Cet article propose MicKey, un processus de correspondance de points clés capable de prédire les correspondances métriques dans l'espace d'une caméra 3D. En apprenant la correspondance des coordonnées 3D entre les images, nous sommes en mesure de déduire des métriques relatives.
