
 Périphériques technologiques
IA
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Périphériques technologiques
IA
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?
Parlons des systèmes de conduite autonome de bout en bout et de nouvelle génération, ainsi que de quelques malentendus sur la conduite autonome de bout en bout ?

Au cours du mois dernier, pour des raisons bien connues, j'ai eu des échanges très intensifs avec divers professeurs et camarades de classe du secteur. Un sujet inévitable dans l'échange est naturellement le populaire Tesla FSD V12 de bout en bout. Je voudrais profiter de cette occasion pour trier certaines de mes pensées et opinions en ce moment pour votre référence et votre discussion.

Comment définir un système de conduite autonome de bout en bout, et quels problèmes devons-nous espérer résoudre de bout en bout ?
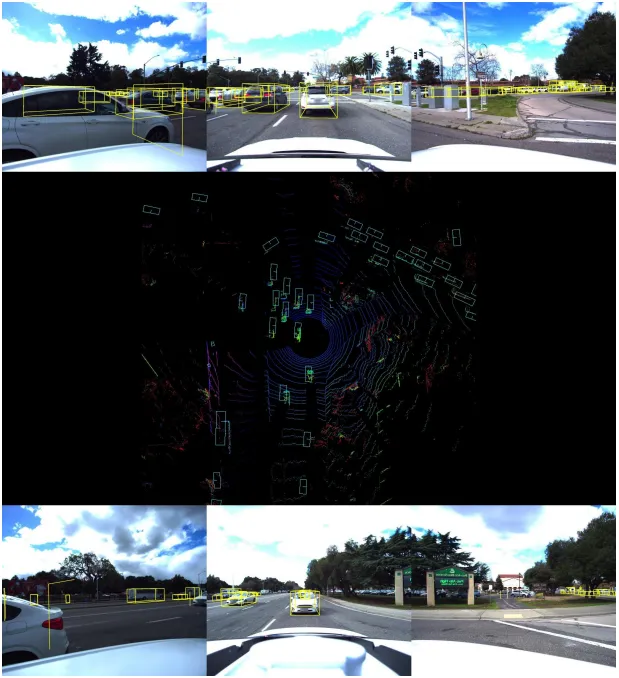
Selon la définition la plus traditionnelle, un système de bout en bout fait référence à un système qui saisit les informations brutes des capteurs et génère directement les variables pertinentes pour la tâche. Par exemple, en reconnaissance d'images, CNN peut être appelé de bout en bout par rapport à la méthode traditionnelle d'extraction de caractéristiques + classificateur. Dans les tâches de conduite autonome, les données de divers capteurs (caméras/LiDAR/Radar/IMU, etc.) sont entrées et les signaux de commande pour la conduite du véhicule (angle de l'accélérateur/du volant, etc.) sont directement émis. Afin de considérer le problème d'adaptation entre différents modèles, la sortie peut également être adaptée à la trajectoire du véhicule. Il s’agit d’une définition au sens traditionnel, ou ce que j’appelle une définition étroite de bout en bout. Sur cette base, une certaine supervision des tâches intermédiaires a également été dérivée pour améliorer les capacités de performance.
Cependant, en plus d'une définition aussi étroite, nous devrions également y réfléchir essentiellement : quelle est l'essence du bout en bout ? Je pense que l'essence du bout en bout devrait être la transmission sans perte d'informations sensorielles. Rappelons d'abord à quoi ressemble l'interface entre les modules de détection et les modules PnC dans un système non de bout en bout. Généralement, nous aurons une détection/analyse d'attributs/prédiction pour les objets de la liste blanche (voitures, personnes, etc.) et une compréhension de l'environnement statique (structure routière/limite de vitesse/feux de circulation, etc.). Nous effectuerons également un travail de détection d'obstacles généraux. D'un point de vue macro, les informations produites par la perception sont une abstraction de scénarios de conduite complexes, et c'est une abstraction explicite définie manuellement. Cependant, pour certains scénarios inhabituels, l'abstraction explicite actuelle ne peut pas exprimer pleinement les facteurs qui affectent le comportement de conduite dans la scène, ou les tâches que nous devons définir sont trop nombreuses et trop triviales, et il est difficile d'énumérer toutes les tâches requises. Par conséquent, le système de bout en bout fournit une représentation complète (peut-être implicite), dans l’espoir d’appliquer automatiquement et sans perte ces informations au PnC. Je pense que tous les systèmes capables de répondre à de telles exigences peuvent être qualifiés de de bout en bout généralisé.
En ce qui concerne d'autres problèmes, tels qu'une certaine optimisation des scénarios d'interaction dynamique, mon opinion personnelle est qu'au moins non seulement de bout en bout peut résoudre ces problèmes, mais que les méthodes traditionnelles peuvent résoudre ces problèmes. Bien entendu, lorsque la quantité de données est suffisamment importante, le système de bout en bout peut constituer une très bonne solution. La question de savoir si cela est nécessaire sera discutée dans les prochaines questions.
Quelques malentendus sur la conduite autonome de bout en bout ?
Assurez-vous d'émettre des signaux de contrôle et des points de cheminement de bout en bout
Pour le concept de bout en bout généralisé, si vous pouvez être d'accord avec le concept mentionné ci-dessus, alors ce problème sera facile à résoudre comprendre. Le bout en bout met l’accent sur la transmission sans perte des informations, plutôt que sur la sortie directe du volume de tâches. Une telle méthode de traitement de bout en bout nécessite un grand nombre de solutions secrètes pour assurer la sécurité, et rencontrera également certains problèmes au cours du processus de mise en œuvre, qui se dévoileront progressivement au cours du traitement ultérieur.
Le système de bout en bout doit être basé sur de grands modèles ou sur une vision pure
Le concept de conduite autonome de bout en bout n'a pas de lien nécessaire avec la conduite autonome sur grand modèle et la conduite autonome visuelle pure . Ces trois concepts existent de manière totalement indépendante. Un système de bout en bout ne doit pas nécessairement être piloté par un grand modèle au sens traditionnel du terme, ni nécessairement purement visuel. Il existe des liens entre les trois, mais ils ne sont pas équivalents.
J'ai déjà écrit un article qui développe la relation entre ces concepts. Pour plus de détails, voir : https://zhuanlan.zhihu.com/p/664189972
À long terme, est-il possible pour ce qui précède ? Le système de bout en bout mentionné au sens étroit est-il possible ? Parvenir à une conduite autonome au-dessus du niveau L3 ?
En fait, je veux d'abord me plaindre, Ceux qui prétendent utiliser de grands modèles pour renverser L4 n'ont jamais réellement fait de L4 ; ceux qui prétendent pouvoir guérir toutes les maladies de bout en bout n'ont jamais fait de PnC. Ainsi, après avoir discuté de bout en bout avec de nombreuses personnes enthousiastes, cela s'est transformé en une dispute purement religieuse qui ne peut être vérifiée ou falsifiée. Nous, les étudiants engagés dans la recherche et le développement de pointe, devrions encore être plus pragmatiques et prêter attention aux preuves. . . À tout le moins, vous devez avoir quelques connaissances de base sur ce que vous souhaitez renverser et comprendre les questions épineuses impliquées. C’est la qualité scientifique de base que vous devez avoir. . .
Pour revenir au sujet, pour le moment, je suis pessimiste. Indépendamment du fait que le FSD prétend actuellement être purement de bout en bout, ses performances sont loin d'atteindre la fiabilité et la stabilité requises au-dessus du niveau L3 à l'avenir, même si ce véhicule est statistiquement aussi sûr qu'un humain. il devra encore faire face à la manière d'être aussi sûr qu'une erreur d'alignement du conducteur. Pour le dire plus crûment, si un système de conduite autonome veut être accepté par le public et l'opinion publique, la clé ne réside peut-être pas dans un taux d'accidents et un taux de mortalité absolus, mais dans la question de savoir si le public peut accepter que certains scénarios soient nocif pour les humains. Relativement facile à résoudre, alors que les machines font des erreurs. Cette exigence est plus difficile à satisfaire pour un système pur de bout en bout. Plus précisément, cela a été expliqué dans une réponse que j'ai donnée il y a 21 ans. Pour plus de détails, voir :
Comment voir le message Moments de Robin Li : La conduite sans conducteur provoquera certainement un accident, mais la probabilité est bien inférieure à celle de la conduite humaine ?
https://www.zhihu.com/question/530828899/answer/2590673435?utm_psn=1762524415009697792
Prenez Waymo et Cruise en Amérique du Nord comme exemples. En fait, ils ont eu de nombreux accidents, mais pourquoi Cruise est-il apparu en dernier. moment ? Quel accident est particulièrement inacceptable pour les régulateurs et le public ? Cet accident a fait deux blessés. La première collision était assez difficile à éviter pour les conducteurs humains, mais elle était en fait acceptable. Cependant, après cette collision, de graves blessures secondaires se sont produites : le système a mal évalué le lieu de la collision et l'emplacement des blessés, afin de ne pas bloquer la circulation, il est passé en mode arrêt et a traîné les blessés pendant une longue période. Un tel comportement est quelque chose qu’aucun conducteur humain normal ne ferait, et l’impact est très mauvais. Cet incident a directement conduit à des troubles ultérieurs à Cruise. Cet incident a en fait tiré la sonnette d'alarme pour nous : comment éviter que de telles choses ne se produisent devrait être une considération sérieuse dans le développement et l'exploitation de systèmes de conduite autonomes.
Alors en ce moment, quelles sont les solutions pratiques pour la prochaine génération de systèmes de conduite assistée produits en série ?
Pour faire simple, je pense qu'un système approprié doit d'abord explorer pleinement la limite supérieure des capacités du système traditionnel, puis la combiner avec une flexibilité et une universalité de bout en bout, ce qui est un progressive de bout en bout -fin solution. Bien sûr, comment combiner les deux de manière organique est un contenu payant, haha. . . Mais nous pouvons analyser ce que fait actuellement ce que l’on appelle le planificateur de bout en bout ou basé sur l’apprentissage.
D'après ma compréhension limitée, lorsque le modèle actuel dit de bout en bout est utilisé dans la conduite, la trajectoire de sortie sera suivie par une solution basée sur des méthodes traditionnelles, ou un tel planificateur basé sur l'apprentissage et un algorithme de planification de trajectoire traditionnel. . Plusieurs trajectoires seront générées en même temps, puis un sélecteur sera utilisé pour en sélectionner une à exécuter. Si l'architecture du système est conçue de cette manière, la limite supérieure des performances d'un tel système en cascade est en réalité limitée par un tel plan de dissimulation et un tel sélecteur. Si une telle solution est toujours basée sur un pur apprentissage rétroactif, il y aura toujours des échecs imprévisibles et elle ne pourra essentiellement pas atteindre l’objectif d’être sûr. Si vous envisagez d'utiliser une méthode de planification traditionnelle pour optimiser ou sélectionner une telle trajectoire de sortie, elle est équivalente à la trajectoire produite par la méthode basée sur l'apprentissage. Elle fournit simplement une solution initiale à un tel problème d'optimisation et de recherche. nous directement Qu'en est-il de l'optimisation et de la recherche de telles trajectoires ?
Bien sûr, certains étudiants sauteront le pas et diront qu'un tel problème d'optimisation ou de recherche n'est pas convexe et que l'espace d'état est trop grand pour être implémenté en temps réel sur un système monté sur véhicule. Je demande à chacun de réfléchir attentivement à cette question : au cours des 10 dernières années, le système de perception a bénéficié d'un développement de dividendes en puissance de calcul d'au moins 100 fois, mais qu'en est-il de notre module PnC ? Si nous permettons également au module PnC d’utiliser une grande puissance de calcul, combinée à certains développements d’algorithmes d’optimisation avancés ces dernières années, cette conclusion sera-t-elle toujours valable ? Face à de tels problèmes, nous ne devons pas nous reposer sur nos lauriers et nous appuyer sur des pistes, mais réfléchir à ce qui est juste selon les premiers principes.
Comment concilier la relation entre les méthodes data-driven et traditionnelles ?
En fait, un exemple très similaire à la conduite autonome est celui de jouer aux échecs rien qu'en février de cette année, Deepmind a publié un article (Grandmaster-Level Chess Without Search : https://arxiv.org/abs/2402.04494). En explorant s'il est possible d'utiliser uniquement la recherche basée sur les données et d'abandonner la recherche MCTS dans AlphaGo et AlphaZero. Une analogie avec la conduite autonome est qu’un seul réseau est utilisé pour générer directement des actions, ignorant toutes les étapes ultérieures. La conclusion de l'article est qu'avec une échelle considérable de données et de paramètres de modèle, un résultat raisonnable peut être obtenu sans recherche. Cependant, par rapport à la méthode plus recherche, il existe encore un écart très important. (La comparaison ici dans l'article n'est en fait pas juste. L'écart réel devrait être encore plus grand.) Surtout lorsqu'il s'agit de résoudre certaines fins de partie difficiles, les performances purement basées sur les données sont très médiocres. Cette analogie avec la conduite autonome signifie que dans des scénarios difficiles ou des situations difficiles qui nécessitent des jeux en plusieurs étapes, il est encore difficile d'abandonner complètement les algorithmes traditionnels d'optimisation ou de recherche. Utiliser raisonnablement les avantages de diverses technologies comme AlphaZero est le moyen le plus efficace d’améliorer les performances.
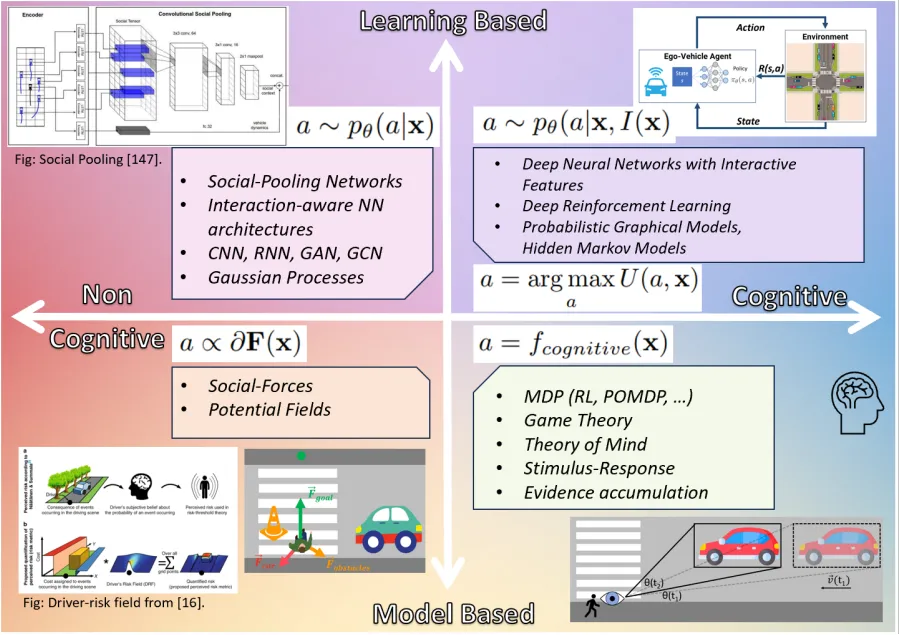
Méthode traditionnelle = basée sur des règles, sinon ?
Ce concept doit également être corrigé à plusieurs reprises dans mes interactions avec de nombreuses personnes. Selon la définition de nombreuses personnes, tant qu'elle n'est pas purement basée sur des données, elle est appelée basée sur des règles. Prenons l'exemple du jeu d'échecs. La mémorisation de formules et d'enregistrements d'échecs par cœur est basée sur des règles, mais si vous donnez au modèle des capacités de raisonnement via la recherche et l'optimisation comme AlphaGo et AlphaZero, je ne pense pas que cela puisse être qualifié de basé sur des règles. C’est précisément ce qui manque au grand modèle actuel et ce que les chercheurs tentent de proposer comme modèle basé sur l’apprentissage via CoT et d’autres méthodes. Cependant, chaque action d'une personne au volant a une motivation claire, ce qui est différent des tâches telles que la reconnaissance d'images purement basée sur les données, qui ne peuvent pas en décrire clairement les raisons. Dans le cadre d’une conception d’architecture algorithmique appropriée, les trajectoires de décision devraient devenir variables et être optimisées uniformément sous la direction d’un objectif scientifique. Plutôt que de résoudre divers cas en appliquant de force des correctifs et en ajustant les paramètres. Un tel système n’aura naturellement pas de règles étranges de code en dur.
Résumé
Enfin, le bout en bout est peut-être une voie technique prometteuse, mais il reste encore beaucoup à explorer sur la manière dont un tel concept peut être mis en pratique. Est-ce la seule bonne solution pour empiler les données et les paramètres du modèle ? À mon avis, ce n’est pas le cas pour le moment ? Je pense qu'en tant que technicien de recherche de pointe, nous devrions à tout moment poursuivre véritablement les premiers principes et la pensée d'ingénieur mentionnés par Musk, et réfléchir à l'essence du problème à partir de la pratique, plutôt que de faire de Musk lui-même un premier principe. . Si vous voulez être vraiment loin devant, vous ne devez pas abandonner la réflexion et suivre ce que disent les autres, sinon vous devrez continuer à essayer de dépasser dans les virages.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Pourquoi le Gaussian Splatting est-il si populaire dans la conduite autonome que le NeRF commence à être abandonné ?
Jan 17, 2024 pm 02:57 PM
Écrit ci-dessus et compréhension personnelle de l'auteur Le Gaussiansplatting tridimensionnel (3DGS) est une technologie transformatrice qui a émergé dans les domaines des champs de rayonnement explicites et de l'infographie ces dernières années. Cette méthode innovante se caractérise par l’utilisation de millions de gaussiennes 3D, ce qui est très différent de la méthode du champ de rayonnement neuronal (NeRF), qui utilise principalement un modèle implicite basé sur les coordonnées pour mapper les coordonnées spatiales aux valeurs des pixels. Avec sa représentation explicite de scènes et ses algorithmes de rendu différenciables, 3DGS garantit non seulement des capacités de rendu en temps réel, mais introduit également un niveau de contrôle et d'édition de scène sans précédent. Cela positionne 3DGS comme un révolutionnaire potentiel pour la reconstruction et la représentation 3D de nouvelle génération. À cette fin, nous fournissons pour la première fois un aperçu systématique des derniers développements et préoccupations dans le domaine du 3DGS.
 Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Comment résoudre le problème de la longue traîne dans les scénarios de conduite autonome ?
Jun 02, 2024 pm 02:44 PM
Hier, lors de l'entretien, on m'a demandé si j'avais posé des questions à longue traîne, j'ai donc pensé faire un bref résumé. Le problème à longue traîne de la conduite autonome fait référence aux cas extrêmes dans les véhicules autonomes, c'est-à-dire à des scénarios possibles avec une faible probabilité d'occurrence. Le problème perçu de la longue traîne est l’une des principales raisons limitant actuellement le domaine de conception opérationnelle des véhicules autonomes intelligents à véhicule unique. L'architecture sous-jacente et la plupart des problèmes techniques de la conduite autonome ont été résolus, et les 5 % restants des problèmes à longue traîne sont progressivement devenus la clé pour restreindre le développement de la conduite autonome. Ces problèmes incluent une variété de scénarios fragmentés, de situations extrêmes et de comportements humains imprévisibles. La « longue traîne » des scénarios limites dans la conduite autonome fait référence aux cas limites dans les véhicules autonomes (VA). Les cas limites sont des scénarios possibles avec une faible probabilité d'occurrence. ces événements rares
 Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
Choisir une caméra ou un lidar ? Une étude récente sur la détection robuste d'objets 3D
Jan 26, 2024 am 11:18 AM
0. Écrit à l'avant&& Compréhension personnelle que les systèmes de conduite autonome s'appuient sur des technologies avancées de perception, de prise de décision et de contrôle, en utilisant divers capteurs (tels que caméras, lidar, radar, etc.) pour percevoir l'environnement et en utilisant des algorithmes et des modèles pour une analyse et une prise de décision en temps réel. Cela permet aux véhicules de reconnaître les panneaux de signalisation, de détecter et de suivre d'autres véhicules, de prédire le comportement des piétons, etc., permettant ainsi de fonctionner en toute sécurité et de s'adapter à des environnements de circulation complexes. Cette technologie attire actuellement une grande attention et est considérée comme un domaine de développement important pour l'avenir des transports. . un. Mais ce qui rend la conduite autonome difficile, c'est de trouver comment faire comprendre à la voiture ce qui se passe autour d'elle. Cela nécessite que l'algorithme de détection d'objets tridimensionnels du système de conduite autonome puisse percevoir et décrire avec précision les objets dans l'environnement, y compris leur emplacement,
 Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Avez-vous vraiment maîtrisé la conversion des systèmes de coordonnées ? Des enjeux multi-capteurs indispensables à la conduite autonome
Oct 12, 2023 am 11:21 AM
Le premier article pilote et clé présente principalement plusieurs systèmes de coordonnées couramment utilisés dans la technologie de conduite autonome, et comment compléter la corrélation et la conversion entre eux, et enfin construire un modèle d'environnement unifié. L'objectif ici est de comprendre la conversion du véhicule en corps rigide de caméra (paramètres externes), la conversion de caméra en image (paramètres internes) et la conversion d'image en unité de pixel. La conversion de 3D en 2D aura une distorsion, une traduction, etc. Points clés : Le système de coordonnées du véhicule et le système de coordonnées du corps de la caméra doivent être réécrits : le système de coordonnées planes et le système de coordonnées des pixels Difficulté : la distorsion de l'image doit être prise en compte. La dé-distorsion et l'ajout de distorsion sont compensés sur le plan de l'image. 2. Introduction Il existe quatre systèmes de vision au total : système de coordonnées du plan de pixels (u, v), système de coordonnées d'image (x, y), système de coordonnées de caméra () et système de coordonnées mondiales (). Il existe une relation entre chaque système de coordonnées,
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un rôle important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contrôle de la planification en aval. La tâche de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer ! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus tôt possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R : Regardez d’abord l’enquête, p
 SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
SIMPL : un benchmark de prédiction de mouvement multi-agents simple et efficace pour la conduite autonome
Feb 20, 2024 am 11:48 AM
Titre original : SIMPL : ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Lien article : https://arxiv.org/pdf/2402.02519.pdf Lien code : https://github.com/HKUST-Aerial-Robotics/SIMPL Affiliation de l'auteur : Université des sciences de Hong Kong et technologie Idée DJI Paper : cet article propose une base de référence de prédiction de mouvement (SIMPL) simple et efficace pour les véhicules autonomes. Par rapport au cent agent traditionnel
 NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
NuScenes dernier SOTA SparseAD : les requêtes clairsemées contribuent à une conduite autonome efficace de bout en bout !
Apr 17, 2024 pm 06:22 PM
Écrit à l'avant et point de départ Le paradigme de bout en bout utilise un cadre unifié pour réaliser plusieurs tâches dans les systèmes de conduite autonome. Malgré la simplicité et la clarté de ce paradigme, les performances des méthodes de conduite autonome de bout en bout sur les sous-tâches sont encore loin derrière les méthodes à tâche unique. Dans le même temps, les fonctionnalités de vue à vol d'oiseau (BEV) denses, largement utilisées dans les méthodes de bout en bout précédentes, rendent difficile l'adaptation à davantage de modalités ou de tâches. Un paradigme de conduite autonome de bout en bout (SparseAD) centré sur la recherche clairsemée est proposé ici, dans lequel la recherche clairsemée représente entièrement l'ensemble du scénario de conduite, y compris l'espace, le temps et les tâches, sans aucune représentation BEV dense. Plus précisément, une architecture clairsemée unifiée est conçue pour la connaissance des tâches, notamment la détection, le suivi et la cartographie en ligne. De plus, lourd
 FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet : le premier algorithme de détection de cible basé sur une caméra fisheye
Apr 26, 2024 am 11:37 AM
La détection de cibles est un problème relativement mature dans les systèmes de conduite autonome, parmi lesquels la détection des piétons est l'un des premiers algorithmes à être déployés. Des recherches très complètes ont été menées dans la plupart des articles. Cependant, la perception de la distance à l’aide de caméras fisheye pour une vue panoramique est relativement moins étudiée. En raison de la distorsion radiale importante, la représentation standard du cadre de délimitation est difficile à mettre en œuvre dans les caméras fisheye. Pour alléger la description ci-dessus, nous explorons les conceptions étendues de boîtes englobantes, d'ellipses et de polygones généraux dans des représentations polaires/angulaires et définissons une métrique de segmentation d'instance mIOU pour analyser ces représentations. Le modèle fisheyeDetNet proposé avec une forme polygonale surpasse les autres modèles et atteint simultanément 49,5 % de mAP sur l'ensemble de données de la caméra fisheye Valeo pour la conduite autonome.
