
 Périphériques technologiques
IA
Promener le « chien » sur le ballon de yoga ! Eureka, sélectionné parmi les dix meilleurs projets de NVIDIA, a réalisé une nouvelle avancée
Périphériques technologiques
IA
Promener le « chien » sur le ballon de yoga ! Eureka, sélectionné parmi les dix meilleurs projets de NVIDIA, a réalisé une nouvelle avancée
Promener le « chien » sur le ballon de yoga ! Eureka, sélectionné parmi les dix meilleurs projets de NVIDIA, a réalisé une nouvelle avancée


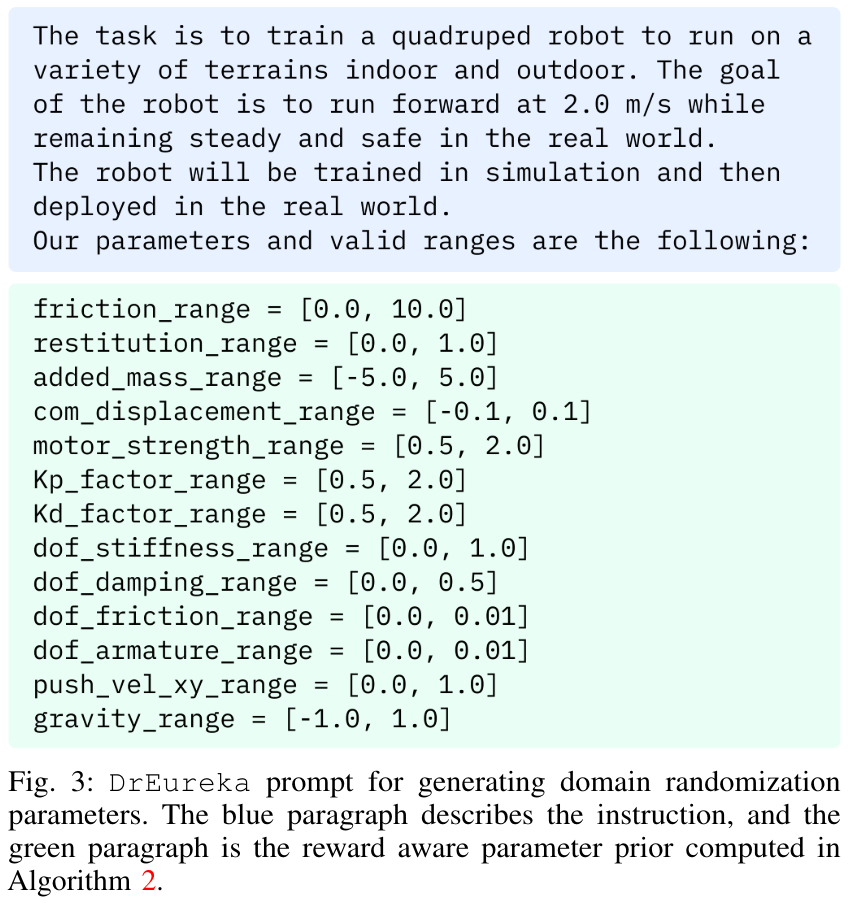
Adresse papier : https://eureka-research.github.io/dr-eureka/assets/dreureka-paper.pdf Page d'accueil du projet : https://github.com/eureka- Research/DrEureka Titre de l'article : DrEureka : Language Model Guided Sim-To-Real Transfer
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 Quelles bibliothèques sont utilisées pour les opérations du numéro de point flottantes en Go?
Apr 02, 2025 pm 02:06 PM
Quelles bibliothèques sont utilisées pour les opérations du numéro de point flottantes en Go?
Apr 02, 2025 pm 02:06 PM
La bibliothèque utilisée pour le fonctionnement du numéro de point flottante dans le langage go présente comment s'assurer que la précision est ...
 Quelles bibliothèques de GO sont développées par de grandes entreprises ou fournies par des projets open source bien connus?
Apr 02, 2025 pm 04:12 PM
Quelles bibliothèques de GO sont développées par de grandes entreprises ou fournies par des projets open source bien connus?
Apr 02, 2025 pm 04:12 PM
Quelles bibliothèques de GO sont développées par de grandes entreprises ou des projets open source bien connus? Lors de la programmation en Go, les développeurs rencontrent souvent des besoins communs, ...
 Gitee Pages STATIQUE Le déploiement du site Web a échoué: comment dépanner et résoudre les erreurs de fichier unique 404?
Apr 04, 2025 pm 11:54 PM
Gitee Pages STATIQUE Le déploiement du site Web a échoué: comment dépanner et résoudre les erreurs de fichier unique 404?
Apr 04, 2025 pm 11:54 PM
GiteEpages STATIQUE Le déploiement du site Web a échoué: 404 Dépannage des erreurs et résolution lors de l'utilisation de Gitee ...
 Comment exécuter le projet H5
Apr 06, 2025 pm 12:21 PM
Comment exécuter le projet H5
Apr 06, 2025 pm 12:21 PM
L'exécution du projet H5 nécessite les étapes suivantes: Installation des outils nécessaires tels que le serveur Web, Node.js, les outils de développement, etc. Créez un environnement de développement, créez des dossiers de projet, initialisez les projets et écrivez du code. Démarrez le serveur de développement et exécutez la commande à l'aide de la ligne de commande. Aperçu du projet dans votre navigateur et entrez l'URL du serveur de développement. Publier des projets, optimiser le code, déployer des projets et configurer la configuration du serveur Web.
 Comment obtenir les données de la région d'expédition de la version à l'étranger? Quelles sont les ressources prêtes à l'emploi disponibles?
Apr 01, 2025 am 08:15 AM
Comment obtenir les données de la région d'expédition de la version à l'étranger? Quelles sont les ressources prêtes à l'emploi disponibles?
Apr 01, 2025 am 08:15 AM
Description de la question: Comment obtenir les données de la région d'expédition de la version à l'étranger? Y a-t-il des ressources prêtes à l'emploi disponibles? Soyez précis dans le commerce électronique transfrontalier ou les entreprises mondialisées ...
 Comment résoudre le problème de conversion de type user_id lors de l'utilisation du flux redis pour implémenter les files d'attente de messages dans le langage Go?
Apr 02, 2025 pm 04:54 PM
Comment résoudre le problème de conversion de type user_id lors de l'utilisation du flux redis pour implémenter les files d'attente de messages dans le langage Go?
Apr 02, 2025 pm 04:54 PM
Le problème de l'utilisation de Redessstream pour implémenter les files d'attente de messages dans le langage GO consiste à utiliser le langage GO et redis ...
 Dessin graphique de sablier Python: comment éviter les erreurs variables non définies?
Apr 01, 2025 pm 06:27 PM
Dessin graphique de sablier Python: comment éviter les erreurs variables non définies?
Apr 01, 2025 pm 06:27 PM
Précision avec Python: Source de sablier Dessin graphique et vérification d'entrée Cet article résoudra le problème de définition variable rencontré par un novice Python dans le programme de dessin graphique de sablier. Code...
 Comment spécifier la base de données associée au modèle de Beego ORM?
Apr 02, 2025 pm 03:54 PM
Comment spécifier la base de données associée au modèle de Beego ORM?
Apr 02, 2025 pm 03:54 PM
Dans le cadre du cadre de beegoorm, comment spécifier la base de données associée au modèle? De nombreux projets Beego nécessitent que plusieurs bases de données soient opérées simultanément. Lorsque vous utilisez Beego ...
