10000 contenu connexe trouvé

Ajoutez SOTA en temps réel et montez en flèche ! FastOcc : un algorithme Occ plus rapide et convivial pour le déploiement est là !
Présentation de l'article:Écrit ci-dessus & La compréhension personnelle de l'auteur est que dans le système de conduite autonome, la tâche de perception est un élément crucial de l'ensemble du système de conduite autonome. L'objectif principal de la tâche de perception est de permettre aux véhicules autonomes de comprendre et de percevoir les éléments environnementaux environnants, tels que les véhicules circulant sur la route, les piétons au bord de la route, les obstacles rencontrés lors de la conduite, les panneaux de signalisation sur la route, etc., aidant ainsi en aval modules Prendre des décisions et des actions correctes et raisonnables. Un véhicule doté de capacités de conduite autonome est généralement équipé de différents types de capteurs de collecte d'informations, tels que des capteurs de caméra à vision panoramique, des capteurs lidar, des capteurs radar à ondes millimétriques, etc., pour garantir que le véhicule autonome peut percevoir et comprendre avec précision l'environnement environnant. éléments , permettant aux véhicules autonomes de prendre les bonnes décisions pendant la conduite autonome. Tête
2024-03-14
commentaire 0
1057

Les véhicules électriques Toyota ajoutent une boîte de vitesses manuelle simulée pour remodeler l'expérience de conduite traditionnelle
Présentation de l'article:Selon les informations du 15 juin, Toyota prévoit d'introduire des transmissions manuelles simulées dans les futurs véhicules électriques pour offrir une expérience unique aux conducteurs. Selon Takeo Kato, président de la division des usines de véhicules électriques de Toyota, le plan sera mis en œuvre à partir de 2026. Toyota espère combiner la sensation de conduite manuelle traditionnelle avec les avantages environnementaux des véhicules électriques pour offrir plus de choix aux consommateurs qui préfèrent les voitures à transmission manuelle. La transmission manuelle simulée comprendra une variété de fonctionnalités pour simuler l’expérience de conduite d’un véhicule à moteur à combustion interne traditionnel. Les conducteurs peuvent ressentir le véritable plaisir de conduire grâce aux changements de vitesse manuels et aux effets sonores du moteur. Un porte-parole de Toyota a révélé que le système fournira également la fonction familière de caler le moteur si l'embrayage est mal utilisé, mais qu'il pourrait être éliminé du modèle de production final. Toyota a déjà identifié Xiong
2023-06-16
commentaire 0
788

ReSimAD : Comment améliorer les performances de généralisation des modèles perceptuels grâce aux données virtuelles
Présentation de l'article:Écrit ci-dessus et la compréhension personnelle de l'auteur est que les changements de domaine au niveau des capteurs des véhicules autonomes sont un phénomène très courant. Par exemple, les véhicules autonomes dans différentes scènes et emplacements, sous différentes conditions d'éclairage et météorologiques, sont équipés de différents capteurs. véhicules autonomes, ce qui précède peut être considéré comme des différences classiques dans le domaine de la conduite autonome. Cette différence de domaine crée des défis pour la conduite autonome, principalement parce que les modèles de conduite autonome qui s'appuient sur d'anciennes connaissances de domaine sont difficiles à déployer directement dans un nouveau domaine jamais vu auparavant sans coût supplémentaire. Par conséquent, dans cet article, nous proposons un schéma de reconstruction-simulation-conscience (ReSimAD) pour fournir une nouvelle perspective et une nouvelle méthode de migration de domaine. Plus précisément, nous utilisons des techniques de reconstruction implicite pour obtenir l'autonomie
2024-01-17
commentaire 0
1342

Conseils pour utiliser le cache pour traiter les données de conduite autonome dans Golang.
Présentation de l'article:Le développement de la technologie de conduite autonome nécessite de traiter de grandes quantités de données. En particulier dans les équipements montés sur véhicule, la transmission et le traitement des données doivent être rapides et efficaces pour garantir une conduite sûre. Golang est un langage de programmation open source léger qui se caractérise par une exécution simultanée et un traitement efficace de données à grande échelle. Cet article expliquera comment utiliser la mise en cache pour traiter les données de conduite autonome dans Golang, améliorant ainsi l'efficacité du traitement des données. 1. Le rôle de la mise en cache Dans le processus de traitement des données des véhicules autonomes, une grande quantité de données doit être collectée, traitée, stockée et transmise. droite
2023-06-21
commentaire 0
1062

Baidu Apollo lance Apollo ADFM, le premier grand modèle au monde prenant en charge la conduite autonome L4
Présentation de l'article:Le 15 mai, Baidu Apollo a organisé l'Apollo Day 2024 dans la vallée du robot automobile Baidu Luobo de Wuhan, démontrant de manière exhaustive les progrès majeurs de Baidu en matière de conduite autonome au cours des dix dernières années, apportant des avancées technologiques basées sur de grands modèles et une nouvelle définition de la sécurité des passagers. Plus grand réseau d'exploitation de véhicules autonomes au monde, Baidu a rendu la conduite autonome plus sûre que la conduite humaine. Grâce à cela, des modes de transport plus sûrs, plus confortables, plus écologiques et à faibles émissions de carbone passent d’un idéal à une réalité. Wang Yunpeng, vice-président du groupe Baidu et président de l'Intelligent Driving Business Group, a déclaré sur place : « Notre intention initiale de construire des véhicules autonomes est de satisfaire le désir croissant des gens de mieux voyager. Tellement beau, nous sommes heureux de voir
2024-06-04
commentaire 0
1293

Introduction détaillée à 7 superbes effets d'animation de chargement HTML5
Présentation de l'article:Lorsque nous transmettons du Big Data ou attendons des opérations complexes, il est préférable d'avoir une petite animation de chargement pour le rappeler à l'utilisateur. Cet article partagera avec vous de superbes effets d'animation de chargement basés sur HTML5. J'espère que vous l'aimerez. 1. HTML5 Canvas implémente une animation de chargement super cool. Cette fois, nous examinons un effet de chargement d'animation de chargement très cool. Il est similaire à l'animation de chargement d'engrenage implémentée en CSS3 pur. Il s'agit également d'une animation. similaire à la rotation. Démonstration en ligne Téléchargement du code source 2. HT..
2017-03-07
commentaire 0
1993

Un article expliquant en détail la technologie de test du système de perception de conduite intelligente
Présentation de l'article:Introduction Avec les progrès de l'intelligence artificielle et de ses technologies logicielles et matérielles, la conduite autonome s'est développée rapidement ces dernières années. Les systèmes de conduite autonome ont été utilisés dans les systèmes d’aide à la conduite de véhicules civils, les robots logistiques autonomes, les drones et d’autres domaines. Le composant de perception est au cœur du système de conduite autonome, qui permet au véhicule d'analyser et de comprendre les informations sur l'environnement de circulation interne et externe. Cependant, comme d’autres systèmes logiciels, les systèmes de perception de la conduite autonome souffrent de failles logicielles. De plus, le système de conduite autonome fonctionne dans des scénarios critiques pour la sécurité et ses défauts logiciels peuvent avoir des conséquences catastrophiques. Ces dernières années, de nombreux décès et blessures ont été causés par des défauts des systèmes de conduite autonome. La technologie de test des systèmes de conduite autonome a reçu une large attention de la part du monde universitaire et de l’industrie. Les entreprises et les instituts de recherche ont proposé une série de mesures comprenant des tests de simulation virtuelle, des tests routiers réels
2023-04-11
commentaire 0
1757

Comment fabriquer une moto dans Crazy Racing Crazy Comment fabriquer une moto dans Crazy Racing Crazy
Présentation de l'article:Crazy Racing vous invite à participer à un voyage d'arcade passionnant en vous aventurant à travers les collines de planètes lointaines à bord du rover que vous construisez. Concevez votre propre voiture et devenez le roi de la galaxie ! Comment fabriquer une moto dans Baoshuang Crazy Racing : 1. Ouvrez d'abord le jeu Baoshuang Crazy Racing. 2. Entrez ensuite dans la page principale du jeu et cliquez sur l'option course. 3. Enfin, assemblez la voiture selon vos propres besoins et selon les instructions du jeu. Crazy Racing est un jeu mobile de simulation de conduite amusant. La qualité d'image de ce jeu est très bonne. Il existe toutes sortes de voitures de course ici. Les joueurs peuvent simuler le mouvement avant et arrière des voitures de course, ressentir la véritable sensation de fonctionnement et parcourir diverses pistes de différentes difficultés.
2024-09-25
commentaire 0
766
La conduite entièrement autonome de Tesla a heurté un mannequin d'enfant à trois reprises et ne s'est pas arrêtée ni accélérée après la collision
Présentation de l'article:Dan O'Dowd est le PDG de la société de développement embarqué Green Hills Software. Il a lancé l'année dernière une initiative appelée « The Dawn Project » pour interdire l'utilisation de logiciels dangereux dans les systèmes de sécurité, y compris l'interdiction des tests Tesla des logiciels de conduite autonome. Afin de simuler la réaction d'une voiture autonome lorsqu'elle rencontre un enfant traversant la route en réalité, The Dawn Project a récemment mené un nouveau test. Les résultats ont montré que la Model 3 était équipée du logiciel de conduite autonome FSD Beta 10.12.2. heurterait le modèle humanoïde d'un enfant : pendant le test, le modèle 3 a heurté violemment le modèle, provoquant la séparation des composants du modèle :
2023-04-09
commentaire 0
1767

CLIP-BEVFormer : superviser explicitement la structure BEVFormer pour améliorer les performances de détection à longue traîne
Présentation de l'article:Écrit ci-dessus et compréhension personnelle de l'auteur : À l'heure actuelle, dans l'ensemble du système de conduite autonome, le module de perception joue un rôle essentiel. Le véhicule autonome roulant sur la route ne peut obtenir des résultats de perception précis que via le module de perception en aval. dans le système de conduite autonome, prend des jugements et des décisions comportementales opportuns et corrects. Actuellement, les voitures dotées de fonctions de conduite autonome sont généralement équipées d'une variété de capteurs d'informations de données, notamment des capteurs de caméra à vision panoramique, des capteurs lidar et des capteurs radar à ondes millimétriques pour collecter des informations selon différentes modalités afin d'accomplir des tâches de perception précises. L'algorithme de perception BEV basé sur la vision pure est privilégié par l'industrie en raison de son faible coût matériel et de sa facilité de déploiement, et ses résultats peuvent être facilement appliqués à diverses tâches en aval.
2024-03-26
commentaire 0
706

Lisez le système de surveillance des conducteurs de voitures intelligentes dans un article
Présentation de l'article:Driver Monitoring System, en abrégé DMS, est l'abréviation de l'anglais Driver Monitor System, c'est-à-dire système de surveillance du conducteur. Il réalise principalement les fonctions d'identification du conducteur, de fatigue du conducteur et de détection des comportements dangereux. Ford DMS System 01 Avec le soutien de la réglementation, le DMS est entré dans la voie rapide du développement. Dans la conduite autonome de niveau L2-L3 qui a commencé la production en série à ce stade, il ne peut en fait être mis en œuvre que dans de nombreux cas. le conducteur est tenu de reprendre le véhicule à temps pour son élimination. Par conséquent, lorsque les conducteurs font trop confiance à la conduite autonome et abandonnent ou affaiblissent le contrôle du processus de conduite, certains accidents peuvent survenir. L'introduction d'un système de surveillance des pilotes DMS peut atténuer efficacement ce problème. Système Magna DMS,
2023-04-11
commentaire 0
2013

Comment découper des images avec Beauty Camera_Tutoriel détaillé sur la découpe d'images avec Beauty Camera
Présentation de l'article:Ouvrez l'application et entrez Beauté, sélectionnez une photo à modifier, il est préférable d'avoir beaucoup de choses en arrière-plan, comme des personnes, des voitures et généralement des scènes de rue * La sélection de mise au point douce est utilisée pour maculer la découpe, la remplir. l'image entière, puis utilisez la gomme pour effacer les parties nécessitant des effets spéciaux, telles que les piétons, les véhicules en mouvement, etc. Sélectionnez le flou dynamique dans l'effet. Ajustez simplement le degré de flou en fonction de vos propres sentiments ~.
2024-06-05
commentaire 0
402

He Xiaopeng parle de Tesla FSD et de Robotaxi : un grand modèle de bout en bout + peut atteindre une conduite autonome de niveau L4
Présentation de l'article:Selon les informations du 25 juillet, la conférence sur la technologie de conduite intelligente IA de Xpeng Motors et la Journée technologique 1024 auront lieu le mardi 30 juillet. L'événement a attiré beaucoup d'attention. He Xiaopeng, président de Xpeng Motors, a également exprimé son point de vue sur la nouvelle version de Tesla du FSD (conduite entièrement autonome) et du Robotaxi (taxi autonome) sur Weibo. He Xiaopeng a déclaré que le FSD de cette année est complètement différent de la conduite autonome de la précédente Tesla en termes de capacités, et il l'apprécie beaucoup. 1. Dans le même temps, il a également mentionné que des discussions récentes avec plusieurs chefs de projet L4 sur des questions liées au « bout en bout » ont révélé que l'industrie estime généralement que la technologie « de bout en bout » est plus adaptée au L2 ou au L3. niveau conduite autonome, et non niveau L4. Cependant, He Xiaopeng a un point de vue différent, il croit fermement en une technologie « de bout en bout » qui combine de grands modèles.
2024-07-25
commentaire 0
947
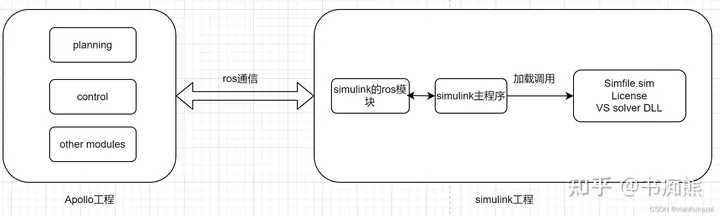
Apollo s'associe à Carsim/TruckSim pour une simulation conjointe
Présentation de l'article:1. La simulation d’arrière-plan joue un rôle important dans la recherche et le développement en matière de conduite autonome. Elle peut considérablement améliorer l’efficacité de la recherche et du développement et garantir la fiabilité des algorithmes. En tant qu'excellente plate-forme open source, le système Baidu Apollo est très adapté aux recherches d'amis intéressés par l'apprentissage de la conduite autonome. De plus, Carsim/Trucksim est un outil de simulation de dynamique de véhicule classique très respecté. Cet article présente la méthode de réalisation d'une simulation locale en temps réel grâce à la combinaison d'Apollo et de Trucksim. Il convient aux débutants pour construire une plateforme de simulation et étudier le système Apollo. 2. Conception de l'architecture Le code principal du projet Apollo est implémenté en C++. Les interfaces courantes pour Trucksim incluent simulink, Python et le langage C.
2024-01-13
commentaire 0
1328

Gu Weihao, PDG de HaoMo Zhixing : Six défis majeurs et nouvelles améliorations auxquels MANA est confronté dans les scénarios urbains
Présentation de l'article:« L'ère de la conduite autonome basée sur les données 3.0 est arrivée. Ce n'est que lorsque les quatre conditions techniques de perception, de cognition, de mode et de données seront établies en parallèle que nous pourrons véritablement entrer dans une nouvelle ère de conduite autonome. pour prendre des décisions basées sur les données. Des canaux et des centres de calcul afin que les données puissent être obtenues plus efficacement et transformées en connaissances. Haomo entre dans l'ère de la conduite autonome 3.0 ! » Lors du 6e HAOMO AI DAY qui s'est tenu le 13 septembre, le PDG de Haomo Zhixing. Gu Dr. Wei Hao a prononcé un discours sur le thème « L'ère 3.0 de la conduite autonome et de la conduite autonome ». Pour la première fois dans l'industrie, il a proposé le jugement de l'industrie selon lequel « la conduite autonome est entrée dans l'ère 3.0 basée sur les données ». Il a également présenté le système d'intelligence des données MANA basé sur des données de pointe A.
2023-04-14
commentaire 0
1187

Mise à niveau Xiaomi SU7 Pro et Max : obtenez un stationnement de bout en bout plus intelligent
Présentation de l'article:Selon les informations du 14 mai, Xiaomi Motors a récemment révélé qu'à mesure que le système du véhicule était mis à niveau vers la dernière version, Xiaomi SU7 Pro et Max avaient implémenté des fonctions de voiturier de bout en bout plus avancées. L'introduction de cette fonction montre que l'efficacité du stationnement est améliorée et que la vitesse maximale est augmentée à 23 km/h. La nouvelle fonction peut également simuler les actions d'inversion et d'évitement d'utilisateurs réels lorsque l'espace est limité, leur permettant ainsi d'effectuer indépendamment des opérations d'inversion et de déplacement. Selon la compréhension de l'éditeur, le cœur de cette mise à niveau réside dans l'adoption d'un grand modèle de bout en bout, qui remplace les multiples modules indépendants précédemment utilisés pour la perception, la prise de décision et la planification. Désormais, le système de conduite intelligente peut générer des trajectoires de conduite directement à partir de l'entrée d'image. Ce grand modèle de bout en bout est l'algorithme de conduite intelligente le plus approfondi qui simule la pensée humaine. Puisque le module intermédiaire est omis
2024-06-01
commentaire 0
990
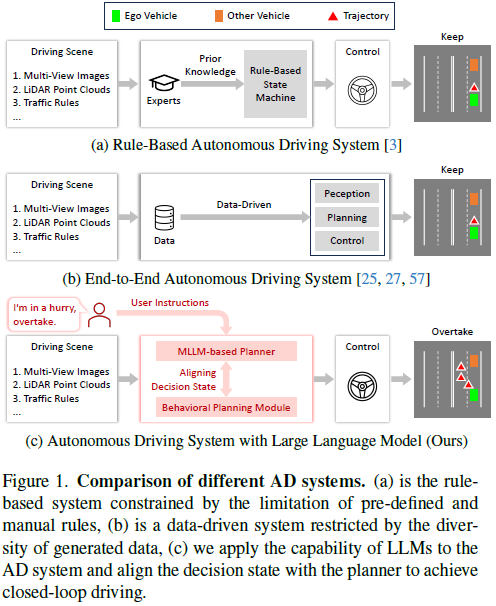
Tout mettre en œuvre pour boucler la boucle ! DriveMLM : combinez parfaitement le LLM avec la planification du comportement de conduite autonome !
Présentation de l'article:Écrit ci-dessus et la compréhension personnelle de l'auteur selon laquelle les modèles de langage à grande échelle ont ouvert un nouveau paysage pour la conduite intelligente, leur donnant une pensée et des capacités cognitives semblables à celles des humains. Cet article examine en profondeur le potentiel des grands modèles de langage (LLM) dans la conduite autonome (AD). Ensuite, DriveMLM est proposé, qui est un framework AD basé sur LLM qui peut réaliser une conduite autonome en boucle fermée dans l'environnement de simulation. Plus précisément, il y a les points suivants : (1) Cet article comble le fossé entre les décisions linguistiques et les commandes de contrôle du véhicule en standardisant les états de décision basés sur des modules de planification de mouvement disponibles dans le commerce (2) Utilisation du LLM multimodal (MLLM) pour modéliser l'AD ; systèmes Le module de planification du comportement est modélisé. Ce module système AD utilise des règles de conduite, des commandes utilisateur et des informations provenant de divers capteurs (tels que des caméras, des lasers, etc.).
2024-01-05
commentaire 0
1257
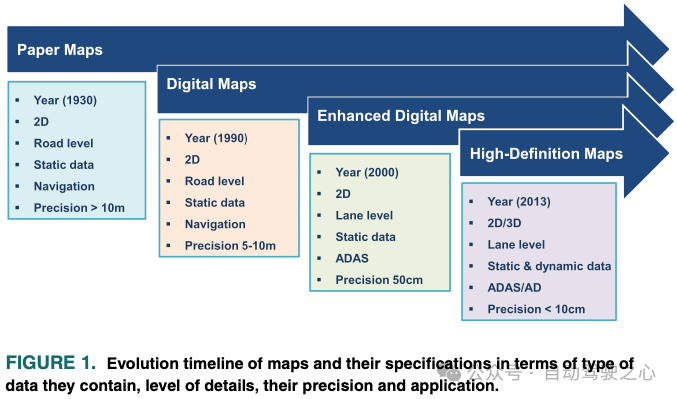
MapNeXt basé sur le cloud et basé sur la voiture est terminé ! Construction de cartes en ligne de haute précision de nouvelle génération
Présentation de l'article:Écrit ci-dessus et compréhension personnelle de l'auteur Dans la mobilité collaborative, connectée et automatisée (CCAM), plus la capacité des véhicules à conduite intelligente à percevoir, modéliser et analyser l'environnement environnant est forte, plus ils sont conscients et capables de comprendre et de prendre des décisions, comme ainsi que d'effectuer des scénarios de conduite complexes en toute sécurité et efficacement. Les cartes de haute précision (HD) représentent les environnements routiers avec une précision centimétrique et des informations sémantiques au niveau des voies, ce qui en fait un composant essentiel des systèmes de mobilité intelligents et un élément clé de la technologie CCAM. Ces cartes offrent aux véhicules automatisés un puissant avantage dans la compréhension de leur environnement. Les cartes HD sont également considérées comme des capteurs cachés ou virtuels car elles rassemblent les connaissances des capteurs physiques (cartes), à savoir le lidar, les caméras, le GPS et l'IMU, pour construire un modèle de l'environnement routier. Carte HD
2024-01-31
commentaire 0
890

Les Californiens regrettent profondément : la fiabilité de la conduite autonome est vraiment préoccupante et la torture des taxis sans pilote est si douloureuse
Présentation de l'article:Le 11 août, la Californie, la région la plus conservatrice des États-Unis, a tenu une audience pour déterminer si les taxis sans conducteur peuvent légalement prendre la route. Après six heures de débat, les partisans de la conduite autonome ont remporté une victoire écrasante lors d'un vote de 3 contre 1, a annoncé le PDG de Cruise, Kyle Vogt, à San Francisco. Des milliers de taxis prenant en charge la technologie de conduite autonome L4 seront lancés au cours des six prochains mois pour fournir tous les services. services météorologiques aux résidents locaux (Source : Cruise) Cependant, après que le Département des véhicules automobiles de Californie a levé l'interdiction des taxis sans conducteur, une semaine plus tard, il a regretté sa décision et a immédiatement émis des mesures de contrôle strictes. C’est incroyable ce que les taxis autonomes ont réalisé en seulement une semaine
2023-08-29
commentaire 0
1293

L3 sera lancé au plus tard au premier semestre de l'année prochaine : une conduite autonome idéale de bout en bout et des performances nettement améliorées
Présentation de l'article:Récemment, avec l'essor de la technologie de l'IA générative, de nombreuses nouvelles forces de construction automobile explorent de nouvelles méthodes de modèles de langage visuel et les nouvelles technologies de conduite intelligente de bout en bout semblent être devenues une direction de recherche commune. Le mois dernier, Li Auto a publié l'architecture technologique de conduite autonome de troisième génération de bout en bout + modèle de langage visuel VLM + modèle mondial. Cette architecture a été proposée à des milliers de personnes pour des tests internes. Elle personnifie un comportement de conduite intelligent, améliore l'efficacité du traitement des informations de l'IA et améliore la capacité à comprendre et à réagir à des conditions routières complexes. Li Xiang a déclaré un jour lors d'un partage public que face à des environnements de conduite rares qui sont difficiles à identifier et à traiter pour la plupart des algorithmes, le VLM (Visual Language Model), un modèle de langage visuel, peut théoriquement améliorer systématiquement les capacités de conduite autonome.
2024-08-07
commentaire 0
606
