

NGUI研究之3D模型坐标转2D屏幕坐标

刚好今天有朋友问我,比较典型的例子就是游戏里面人物的血条。原理很简单就是把3D点换算成2D的点,但是由于NGUI自身是3D所以我们需要先把NGUI下的点转成2D点,然后在把他转成3D的点。听起来有点绕,不要紧我直接上代码。对屏幕自适应不明白的看NGUI研究之如
刚好今天有朋友问我,比较典型的例子就是游戏里面人物的血条。原理很简单就是把3D点换算成2D的点,但是由于NGUI自身是3D所以我们需要先把NGUI下的点转成2D点,然后在把他转成3D的点。听起来有点绕,不要紧我直接上代码。对屏幕自适应不明白的看NGUI研究之如何自适应屏幕
目前我一直都是用NGUI来做人物血条,但是2D血条都会有个限制,就是它不能和模型有遮挡关系。不过血条可以根据人物的位置调节,比如远一点的人物血条会小一些,近一点的人物血条会大一些。
最好让美术做FBX的时候直接内置一个GameObject 的点,因为模型有的高有的低,所以血条的位置高度是不一样的,如果美术内置的话可以让美术来调节模型头顶上的点,这样比较方便。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
using UnityEngine; using System.Collections;
publicclassNewBehaviourScript :MonoBehaviour{
//角色 publicTransform Cube; //角色的血条 publicTransform UI;
//默认血条缩与摄像机的距离 privatefloatFomat; //角色头顶的点, 最好让美术把这个点直接做在fbx模型里面。 privateTransform Head;
voidStart() { //找到角色身上头顶的点 Head=Cube.Find("head"); //计算以下默认血条的距离,也可以写个常量,就是标记一下 Fomat =Vector3.Distance(Head.position,Camera.main.transform.position); }
voidUpdate() { //这里可以判断一下 如果位置没有变化就不要在赋值了 floatnewFomat=Fomat/Vector3.Distance(Head.position,Camera.main.transform.position); UI.position =WorldToUI(Head.position); //计算出血条的缩放比例 UI.localScale=Vector3.one *newFomat;
//测试代码,按下W S键前后移动角色 if(Input.GetKey(KeyCode.W)) Cube.Translate(Vector3.forward); if(Input.GetKey(KeyCode.S)) Cube.Translate(Vector3.back); }
//核心代码在这里把3D点换算成NGUI屏幕上的2D点。 publicstaticVector3 WorldToUI(Vector3 point) { Vector3 pt=Camera.main.WorldToScreenPoint(point); //我发现有时候UICamera.currentCamera 有时候currentCamera会取错,取的时候注意一下啊。 Vector3 ff= UICamera.currentCamera.ScreenToWorldPoint(pt); //UI的话Z轴 等于0 ff.z=0; returnff; } } |
再说一下,一般血条可能都是由多个UISprite组成,那么最好把这些Sprite都挂在同一个GameObject下面,这样只需要修正父对象,所以子对象的缩放都会正确。控制角色移动近一点的截图。

控制角色移动远一点的截图,你会发现血条在屏幕上的比例是不会变化的。

祝大家学习愉快,欢迎讨论,嘿嘿嘿嘿

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7463
7463
 15
1376
52
77
11
18
17
15
1376
52
77
11
18
17

 世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
従来のコンピューティングを超える能力を備えているだけでなく、より低コストでより効率的なパフォーマンスを実現する人工知能モデルを想像してみてください。これは SF ではありません。世界で最も強力なオープンソース MoE モデルである DeepSeek-V2[1] が登場しました。 DeepSeek-V2 は、経済的なトレーニングと効率的な推論の特徴を備えた強力な専門家混合 (MoE) 言語モデルです。これは 236B のパラメータで構成されており、そのうち 21B は各マーカーをアクティブにするために使用されます。 DeepSeek67B と比較して、DeepSeek-V2 はパフォーマンスが優れていると同時に、トレーニング コストを 42.5% 節約し、KV キャッシュを 93.3% 削減し、最大生成スループットを 5.76 倍に高めます。 DeepSeek は一般的な人工知能を研究する会社です
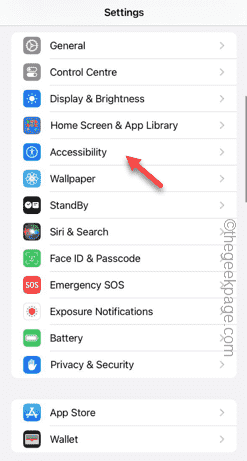 iPhoneのスクリーンショットが機能しない: 修正方法
May 03, 2024 pm 09:16 PM
iPhoneのスクリーンショットが機能しない: 修正方法
May 03, 2024 pm 09:16 PM
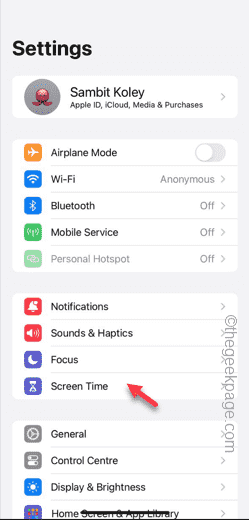
iPhone ではスクリーンショット機能が動作しませんか?スクリーンショットの撮影は非常に簡単で、音量を上げるボタンと電源ボタンを同時に押して携帯電話の画面を取得するだけです。ただし、デバイスでフレームをキャプチャする方法は他にもあります。解決策 1 – Assistive Touch の使用 Assistive Touch 機能を使用してスクリーンショットを撮ります。ステップ 1 – 電話の設定に移動します。ステップ 2 – 次に、タップしてアクセシビリティ設定を開きます。ステップ 3 – タッチ設定を開きます。ステップ 4 – 次に、Assistive Touch 設定を開きます。ステップ 5 – 携帯電話の Assistive Touch をオンにします。ステップ 6 – 「トップメニューのカスタマイズ」を開いてアクセスします。ステップ 7 – ここで必要なのは、これらの機能のいずれかを画面キャプチャにリンクすることだけです。それで最初をクリックしてください
 こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas は正式に電動ロボットの時代に突入します!昨日、油圧式アトラスが歴史の舞台から「涙ながらに」撤退したばかりですが、今日、ボストン・ダイナミクスは電動式アトラスが稼働することを発表しました。ボストン・ダイナミクス社は商用人型ロボットの分野でテスラ社と競争する決意を持っているようだ。新しいビデオが公開されてから、わずか 10 時間ですでに 100 万人以上が視聴しました。古い人が去り、新しい役割が現れるのは歴史的な必然です。今年が人型ロボットの爆発的な年であることは間違いありません。ネットユーザーは「ロボットの進歩により、今年の開会式は人間のように見え、人間よりもはるかに自由度が高い。しかし、これは本当にホラー映画ではないのか?」とコメントした。ビデオの冒頭では、アトラスは仰向けに見えるように地面に静かに横たわっています。次に続くのは驚くべきことです
 MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
今月初め、MIT やその他の機関の研究者らは、MLP に代わる非常に有望な代替案である KAN を提案しました。 KAN は、精度と解釈可能性の点で MLP よりも優れています。また、非常に少数のパラメーターを使用して、多数のパラメーターを使用して実行する MLP よりも優れたパフォーマンスを発揮できます。たとえば、著者らは、KAN を使用して、より小規模なネットワークと高度な自動化で DeepMind の結果を再現したと述べています。具体的には、DeepMind の MLP には約 300,000 個のパラメーターがありますが、KAN には約 200 個のパラメーターしかありません。 KAN は、MLP が普遍近似定理に基づいているのに対し、KAN はコルモゴロフ-アーノルド表現定理に基づいているのと同様に、強力な数学的基礎を持っています。以下の図に示すように、KAN は
 6000mAhのシリコンマイナスバッテリー! Xiaomi 15Proアップグレードが再びリーク
Jul 24, 2024 pm 12:45 PM
6000mAhのシリコンマイナスバッテリー! Xiaomi 15Proアップグレードが再びリーク
Jul 24, 2024 pm 12:45 PM
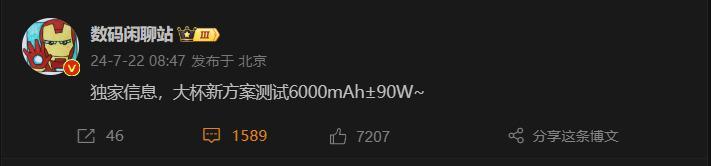
7月23日のニュースによると、ブロガーのDigital Chat Stationは、Xiaomi 15 Proのバッテリー容量が6000mAhに増加し、90Wの有線フラッシュ充電をサポートしているというニュースを伝えました。これは、Xiaomiのデジタルシリーズで最大のバッテリーを搭載したProモデルになります。 Digital Chat Stationは以前、Xiaomi 15Proのバッテリーは超高エネルギー密度を持ち、シリコン含有量が競合製品よりもはるかに高いことを明らかにしました。 2023 年にシリコンベースの電池が大規模にテストされた後、第 2 世代のシリコン負極電池が業界の将来の発展方向として特定されており、今年は直接的な競争のピークを迎えます。 1. シリコンの理論グラム容量は 4200mAh/g に達することがあり、これはグラファイトのグラム容量の 10 倍以上です (グラファイトの理論グラム容量は 372mAh/g)。負極の場合、リチウムイオン挿入量が最大に達したときの容量が理論上のグラム容量であり、同じ重量下での容量を意味します。
 画面録画が真っ暗になる: 解決策は次のとおりです
May 03, 2024 pm 09:13 PM
画面録画が真っ暗になる: 解決策は次のとおりです
May 03, 2024 pm 09:13 PM
携帯電話の画面で何かを録画しようとしているのに、画面が真っ暗になってしまいませんか?通常、画面録画はコントロール センターから開始できます。場合によっては、画面上の項目を記録できない場合があります。すべてのシナリオと、画面を適切に記録するのに役立つ解決策のリストについて説明しました。画面録画が真っ暗になる理由 – iPhone 画面で再生中に DRM (デジタル著作権管理) で保護されたコンテンツを録画しようとしても、何も得られません。出力は真っ黒な画面になります。 Netflix、Disney+、Hulu、Peacock などの主要な OTT プラットフォームはすべて、画面録画機能をブロックするこの DRM を備えています。 2. いくつかの Web サイトでは画面キャプチャの使用を禁止しています
 テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボット「オプティマス」の最新映像が公開され、すでに工場内で稼働可能となっている。通常の速度では、バッテリー(テスラの4680バッテリー)を次のように分類します:公式は、20倍の速度でどのように見えるかも公開しました - 小さな「ワークステーション」上で、ピッキング、ピッキング、ピッキング:今回は、それがリリースされたハイライトの1つビデオの内容は、オプティマスが工場内でこの作業を完全に自律的に行い、プロセス全体を通じて人間の介入なしに完了するというものです。そして、オプティマスの観点から見ると、自動エラー修正に重点を置いて、曲がったバッテリーを拾い上げたり配置したりすることもできます。オプティマスのハンドについては、NVIDIA の科学者ジム ファン氏が高く評価しました。オプティマスのハンドは、世界の 5 本指ロボットの 1 つです。最も器用。その手は触覚だけではありません
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
