

cocos2dx A* + tiledMap

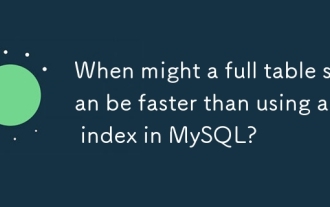
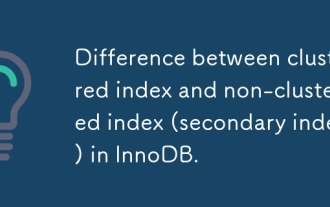
前面一章讲了cocos2dx 中使用A星算法 这章中讲 A*结合tiledmap 先看下效果图 图有点丑,忍受下 绿色的块 表示人物的行走的路线(A*算法的结果) 红色部分 表示A*算法搜寻过的点(越少,速度越快) 黑色的部分(其实是无色块,因为背景是黑色的) 表示障碍物 这张图是
前面一章讲了cocos2dx 中使用A星算法
这章中讲 A*结合tiledmap
先看下效果图

图有点丑,忍受下
绿色的块 表示人物的行走的路线(A*算法的结果)
红色部分 表示A*算法搜寻过的点(越少,速度越快)
黑色的部分(其实是无色块,因为背景是黑色的) 表示障碍物
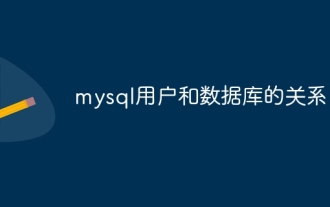
这张图是用tiledmap做出来的, 看看里面的内容
可以看到 我把不能通过的地区的图块给删了
tiledmap中有2个层 一个是background, 一个是road. 为了方便, 我把road也用同样的图片, 最好的方法是用一种同样的瓦片拼接出来一条能走的路, 让后把background图层加到road图层上就ok了.
下面直接上源码, 用的时cocos2.2.3, 拷贝到项目中就能用了.当然别忘了自己做个像样的tiledMap .
如果你觉得好用, 就在文章底下顶一个吧 , enjoy it !
#ifndef __HELLOWORLD_SCENE_H__
#define __HELLOWORLD_SCENE_H__
#include "cocos2d.h"
#include "vector"
using namespace std;
USING_NS_CC;
#define MAP_WIDTH 200//要比tmx中的map大
#define MAP_HEIGHT 200
class PathSprite
{
public:
PathSprite(CCSprite* sprite)
{
m_parent = NULL;
m_child = NULL;
m_costToSource = 0;
m_FValue = 0;
m_sprite = sprite;
};
public:
CCSprite* m_sprite;//包含的瓦片精灵
PathSprite* m_parent;//父节点
PathSprite* m_child;//子节点
float m_costToSource;//到起始点的距离
int m_x;//地图坐标
int m_y;
float m_FValue;
};
class PathSearchInfo//寻路类(主要负责寻路的参数和逻辑)
{
public:
static int m_startX;//开始点
static int m_startY;
static int m_endX;//结束点
static int m_endY;
static CCSize m_mapSize;//地图大小
static CCSize m_tileSize;//地图的块大小
static vector<pathsprite> m_openList;//开放列表(里面存放相邻节点)
static PathSprite* m_inspectArray[MAP_WIDTH][MAP_HEIGHT];//全部需要检测的点
static vector<pathsprite> m_pathList;//路径列表
static vector<pathsprite> m_haveInspectList;//检测过的列表
static float calculateTwoObjDistance(PathSprite* obj1, PathSprite* obj2)//计算两个物体间的距离
{
// float _offsetX = obj1->m_x - obj2->m_x;
// float _offsetY = obj1->m_y - obj2->m_y;
// return sqrt( _offsetX * _offsetX + _offsetY * _offsetY);
float _x = abs(obj2->m_x - obj1->m_x);
float _y = abs(obj2->m_y - obj1->m_y);
return _x + _y;
}
static void inspectTheAdjacentNodes(PathSprite* node, PathSprite* adjacent, PathSprite* endNode)//把相邻的节点放入开放节点中
{
if (adjacent)
{
float _x = abs(endNode->m_x - adjacent->m_x);
float _y = abs(endNode->m_y - adjacent->m_y);
float F , G, H1, H2, H3;
adjacent->m_costToSource = node->m_costToSource + calculateTwoObjDistance(node, adjacent);//获得累计的路程
G = adjacent->m_costToSource;
//三种算法, 感觉H2不错
H1 = _x + _y;
H2 = hypot(_x, _y);
H3 = max(_x, _y);
#if 1 //A*算法 = Dijkstra算法 + 最佳优先搜索
F = G + H2;
#endif
#if 0//Dijkstra算法
F = G;
#endif
#if 0//最佳优先搜索
F = H2;
#endif
adjacent->m_FValue = F;
adjacent->m_parent = node;//设置父节点
adjacent->m_sprite->setColor(ccORANGE);//搜寻过的节点设为橘色(测试用)
m_haveInspectList.push_back(adjacent);
node->m_child = adjacent;//设置子节点
PathSearchInfo::m_inspectArray[adjacent->m_x][adjacent->m_y] = NULL;//把检测过的点从检测列表中删除
PathSearchInfo::m_openList.push_back(adjacent);//加入开放列表
}
}
static PathSprite* getMinPathFormOpenList()//从开放节点中获取F值最小值的点
{
if (m_openList.size()>0) {
PathSprite* _sp =* m_openList.begin();
for (vector<pathsprite>::iterator iter = m_openList.begin(); iter != m_openList.end(); iter++)
{
if ((*iter)->m_FValue m_FValue)
{
_sp = *iter;
}
}
return _sp;
}
else
{
return NULL;
}
}
static PathSprite* getObjFromInspectArray(int x, int y)//根据横纵坐标从检测数组中获取点
{
if (x >=0 && y >=0 && x ::iterator iter = m_openList.begin(); iter != m_openList.end(); iter++)
{
if (*iter == sprite)
{
m_openList.erase(iter);
return true;
}
}
return false;
}
};
class HelloWorld : public cocos2d::CCLayer
{
public:
// Here's a difference. Method 'init' in cocos2d-x returns bool, instead of returning 'id' in cocos2d-iphone
virtual bool init();
// there's no 'id' in cpp, so we recommend returning the class instance pointer
static cocos2d::CCScene* scene();
// a selector callback
void menuCloseCallback(CCObject* pSender);
// implement the "static node()" method manually
CREATE_FUNC(HelloWorld);
void onEnter();
virtual bool ccTouchBegan(CCTouch* touch, CCEvent* event);
virtual void ccTouchMoved(CCTouch* touch, CCEvent* event);
virtual void ccTouchEnded(CCTouch* touch, CCEvent* event);
void calculatePath();//计算路径
void drawPath();//绘制路径(测试用)
void clearPath();//清理路径
void playerMove();//人物走动
void update(float dt);//跟新大地图(行走时, 人不动, 地图跟着人动);
public:
CCPoint m_orignPoint;//人物的起始点
PathSprite* m_player;//人物点
int m_playerMoveStep;//人物当前的行程的索引
};
#endif // __HELLOWORLD_SCENE_H__
</pathsprite></pathsprite></pathsprite></pathsprite>#include "HelloWorldScene.h"
USING_NS_CC;
vector<pathsprite> PathSearchInfo::m_openList;
PathSprite* PathSearchInfo::m_inspectArray[MAP_WIDTH][MAP_HEIGHT] = {NULL};
vector<pathsprite> PathSearchInfo::m_pathList;
vector<pathsprite> PathSearchInfo::m_haveInspectList;
CCSize PathSearchInfo::m_mapSize;
CCSize PathSearchInfo::m_tileSize;
int PathSearchInfo::m_startX;
int PathSearchInfo::m_startY;
int PathSearchInfo::m_endX;
int PathSearchInfo::m_endY;
CCScene* HelloWorld::scene()
{
// 'scene' is an autorelease object
CCScene *scene = CCScene::create();
// 'layer' is an autorelease object
HelloWorld *layer = HelloWorld::create();
// add layer as a child to scene
scene->addChild(layer);
// return the scene
return scene;
}
// on "init" you need to initialize your instance
void HelloWorld::onEnter()
{
CCDirector* pDirector = CCDirector::sharedDirector();
pDirector->getTouchDispatcher()->addTargetedDelegate(this, 0, true);
CCLayer::onEnter();
}
bool HelloWorld::init()
{
//////////////////////////////
// 1. super init first
if ( !CCLayer::init() )
{
return false;
}
CCSize visibleSize = CCDirector::sharedDirector()->getVisibleSize();
CCPoint origin = CCDirector::sharedDirector()->getVisibleOrigin();
/////////////////////////////
// 2. add a menu item with "X" image, which is clicked to quit the program
// you may modify it.
CCLabelTTF* pLabel = CCLabelTTF::create("A* + tiledMap", "Arial", 24);
// position the label on the center of the screen
pLabel->setPosition(ccp(origin.x + visibleSize.width/2,
origin.y + visibleSize.height - pLabel->getContentSize().height));
// add the label as a child to this layer
this->addChild(pLabel, 1);
this->scheduleUpdate();
CCTMXTiledMap* map = CCTMXTiledMap::create("gameMap.tmx");
this->addChild(map);
map->setPosition(CCPoint());
CCTMXLayer* _road = map->layerNamed("road");//行走路径的地图
CCSize _mapSize = map->getMapSize();
for (int j = 0; j tileAt(CCPoint(i, j));
if (_sp) {
PathSprite* _pathSprite = new PathSprite(_sp);
_pathSprite->m_x = i;
_pathSprite->m_y = j;
PathSearchInfo::m_inspectArray[i][j] = _pathSprite;//把地图中所有的点一一对应放入检测列表中
}
}
}
PathSearchInfo::m_mapSize = _mapSize;//获取地图的尺寸
PathSearchInfo::m_tileSize = map->getTileSize();//获取瓦片的尺寸
//设置起始和终点
PathSearchInfo::m_startX =30;
PathSearchInfo::m_startY = 75;
//创建一个人物
m_player = new PathSprite(CCSprite::create("10001.png"));
m_player->m_sprite->setAnchorPoint(CCPoint(0.5,0));
this->addChild(m_player->m_sprite);
m_player->m_x = PathSearchInfo::m_startX;//设置人物的起始的地图坐标
m_player->m_y = PathSearchInfo::m_startY;
m_orignPoint = PathSearchInfo::m_inspectArray[PathSearchInfo::m_startX][PathSearchInfo::m_startY]->m_sprite->getPosition();
m_player->m_sprite->setPosition(m_orignPoint);//设置人物的起始的世界坐标
return true;
}
void HelloWorld::calculatePath()
{
//得到开始点的节点
PathSprite* _startNode = PathSearchInfo::m_inspectArray[PathSearchInfo::m_startX][PathSearchInfo::m_startY];
//得到结束点的节点
PathSprite* _endNode = PathSearchInfo::m_inspectArray[PathSearchInfo::m_endX][PathSearchInfo::m_endY];
//因为是开始点 把到起始点的距离设为0, F值也为0
_startNode->m_costToSource = 0;
_startNode->m_FValue = 0;
//把已经检测过的点从检测列表中删除
PathSearchInfo::m_inspectArray[PathSearchInfo::m_startX][PathSearchInfo::m_startY] = NULL;
//把该点放入已经检测过点的列表中
PathSearchInfo::m_haveInspectList.push_back(_startNode);
//然后加入开放列表
PathSearchInfo::m_openList.push_back(_startNode);
PathSprite* _node = NULL;
while (true)
{
//得到离起始点最近的点(如果是第一次执行, 得到的是起点)
_node = PathSearchInfo::getMinPathFormOpenList();
if (!_node)
{
//找不到路径
break;
}
//把计算过的点从开放列表中删除
PathSearchInfo::removeObjFromOpenList( _node);
int _x = _node->m_x;
int _y = _node->m_y;
//
if (_x ==PathSearchInfo::m_endX && _y == PathSearchInfo::m_endY)
{
break;
}
//检测8个方向的相邻节点是否可以放入开放列表中
CCLog("%d, %d",_x, _y);
PathSprite* _adjacent = PathSearchInfo::getObjFromInspectArray( _x + 1, _y + 1);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
_adjacent = PathSearchInfo::getObjFromInspectArray( _x +1, _y);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
_adjacent = PathSearchInfo::getObjFromInspectArray( _x +1, _y-1);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
_adjacent = PathSearchInfo::getObjFromInspectArray( _x , _y -1);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
_adjacent = PathSearchInfo::getObjFromInspectArray( _x -1, _y - 1);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
_adjacent = PathSearchInfo::getObjFromInspectArray( _x -1, _y);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
_adjacent = PathSearchInfo::getObjFromInspectArray( _x -1, _y+1);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
_adjacent = PathSearchInfo::getObjFromInspectArray( _x , _y+1);
PathSearchInfo::inspectTheAdjacentNodes(_node, _adjacent, _endNode);
}
while (_node)
{
//把路径点加入到路径列表中
PathSearchInfo::m_pathList.insert(PathSearchInfo::m_pathList.begin(), _node);
_node = _node->m_parent;
}
}
void HelloWorld::drawPath( )
{
for (vector<pathsprite>::iterator iter = PathSearchInfo::m_pathList.begin(); iter != PathSearchInfo::m_pathList.end(); iter++)
{
(*iter)->m_sprite->setColor(ccGREEN);
}
}
CCRect getBoundingBox(float x, float y, float width, float height)
{
return CCRect(x - width/2, y - height/2, width, height);
}
bool HelloWorld::ccTouchBegan(CCTouch* touch, CCEvent* event)
{
//清除之前的路径
clearPath();
auto nodePosition = convertToNodeSpace( touch->getLocation() );
CCLog("%f, %f", nodePosition.x, nodePosition.y);
// for (int i = 0; i m_sprite->getPositionX(), _sp->m_sprite->getPositionY(), _sp->m_sprite->getContentSize().width, _sp->m_sprite->getContentSize().height);
//
// if (_rect.containsPoint(nodePosition))
// {
PathSprite* _sp = PathSearchInfo::m_inspectArray[(int)(nodePosition.x/PathSearchInfo::m_tileSize.width)][(int)(PathSearchInfo::m_mapSize.height - nodePosition.y/PathSearchInfo::m_tileSize.height)];
if (_sp) {
CCLog("%f, %f", _sp->m_sprite->getPositionX(), _sp->m_sprite->getPositionY());
//获取触摸点, 设置为终点
PathSearchInfo::m_endX = _sp->m_x;
PathSearchInfo::m_endY = _sp->m_y;
//计算路径
calculatePath();
//绘制路径
drawPath( );
//移动物体
playerMove();
}
// }
//
// }
return true;
}
void HelloWorld::ccTouchMoved(CCTouch* touch, CCEvent* event)
{
}
void HelloWorld::ccTouchEnded(CCTouch* touch, CCEvent* event)
{
}
void HelloWorld::menuCloseCallback(CCObject* pSender)
{
#if (CC_TARGET_PLATFORM == CC_PLATFORM_WINRT) || (CC_TARGET_PLATFORM == CC_PLATFORM_WP8)
CCMessageBox("You pressed the close button. Windows Store Apps do not implement a close button.","Alert");
#else
CCDirector::sharedDirector()->end();
#if (CC_TARGET_PLATFORM == CC_PLATFORM_IOS)
exit(0);
#endif
#endif
}
void HelloWorld::clearPath()
{
for (vector<pathsprite>::iterator iter = PathSearchInfo::m_haveInspectList.begin(); iter != PathSearchInfo::m_haveInspectList.end(); iter++)
{
(*iter)->m_sprite->setColor(ccWHITE);
(*iter)->m_costToSource = 0;
(*iter)->m_FValue = 0;
(*iter)->m_parent = NULL;
(*iter)->m_child = NULL;
PathSearchInfo::m_inspectArray[(*iter)->m_x][(*iter)->m_y] = (*iter);
}
//把移除了障碍物的地图放入检测列表中
//PathSearchInfo::m_inspectList = PathSearchInfo::m_mapList;
PathSearchInfo::m_openList.clear();
PathSearchInfo::m_pathList.clear();
PathSearchInfo::m_haveInspectList.clear();
PathSearchInfo::m_startX = m_player->m_x;
PathSearchInfo::m_startY = m_player->m_y;
m_player->m_sprite->stopAllActions();
m_playerMoveStep = 0;
}
void HelloWorld::playerMove()
{
m_playerMoveStep++;
if (m_playerMoveStep >= PathSearchInfo::m_pathList.size()) {
return;
}
m_player->m_x = PathSearchInfo::m_pathList[m_playerMoveStep]->m_x;
m_player->m_y = PathSearchInfo::m_pathList[m_playerMoveStep]->m_y;
//根据路径列表移动人物
m_player->m_sprite->runAction(CCSequence::create(CCMoveTo::create(1/24.0, PathSearchInfo::m_pathList[m_playerMoveStep]->m_sprite->getPosition()), CCCallFunc::create(this, SEL_CallFunc(&HelloWorld::playerMove)) , NULL));
}
void HelloWorld::update(float dt)
{
this->setPosition(m_orignPoint - m_player->m_sprite->getPosition());
}
</pathsprite></pathsprite></pathsprite></pathsprite></pathsprite>
ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7692
7692
 15
1639
14
1393
52
1287
25
1229
29
15
1639
14
1393
52
1287
25
1229
29

 MySQLでインデックスを使用するよりも、フルテーブルスキャンがいつ速くなるのでしょうか?
Apr 09, 2025 am 12:05 AM
MySQLでインデックスを使用するよりも、フルテーブルスキャンがいつ速くなるのでしょうか?
Apr 09, 2025 am 12:05 AM
完全なテーブルスキャンは、MySQLでインデックスを使用するよりも速い場合があります。特定のケースには以下が含まれます。1)データボリュームは小さい。 2)クエリが大量のデータを返すとき。 3)インデックス列が高度に選択的でない場合。 4)複雑なクエリの場合。クエリプランを分析し、インデックスを最適化し、オーバーインデックスを回避し、テーブルを定期的にメンテナンスすることにより、実際のアプリケーションで最良の選択をすることができます。
 INNODBフルテキスト検索機能を説明します。
Apr 02, 2025 pm 06:09 PM
INNODBフルテキスト検索機能を説明します。
Apr 02, 2025 pm 06:09 PM
INNODBのフルテキスト検索機能は非常に強力であり、データベースクエリの効率と大量のテキストデータを処理する能力を大幅に改善できます。 1)INNODBは、倒立インデックスを介してフルテキスト検索を実装し、基本的および高度な検索クエリをサポートします。 2)一致を使用してキーワードを使用して、ブールモードとフレーズ検索を検索、サポートします。 3)最適化方法には、単語セグメンテーションテクノロジーの使用、インデックスの定期的な再構築、およびパフォーマンスと精度を改善するためのキャッシュサイズの調整が含まれます。
 Windows 7にMySQLをインストールできますか?
Apr 08, 2025 pm 03:21 PM
Windows 7にMySQLをインストールできますか?
Apr 08, 2025 pm 03:21 PM
はい、MySQLはWindows 7にインストールできます。MicrosoftはWindows 7のサポートを停止しましたが、MySQLは引き続き互換性があります。ただし、インストールプロセス中に次のポイントに注意する必要があります。WindowsのMySQLインストーラーをダウンロードしてください。 MySQL(コミュニティまたはエンタープライズ)の適切なバージョンを選択します。インストールプロセス中に適切なインストールディレクトリと文字セットを選択します。ルートユーザーパスワードを設定し、適切に保ちます。テストのためにデータベースに接続します。 Windows 7の互換性とセキュリティの問題に注意してください。サポートされているオペレーティングシステムにアップグレードすることをお勧めします。
 MySQL:簡単な学習のためのシンプルな概念
Apr 10, 2025 am 09:29 AM
MySQL:簡単な学習のためのシンプルな概念
Apr 10, 2025 am 09:29 AM
MySQLは、オープンソースのリレーショナルデータベース管理システムです。 1)データベースとテーブルの作成:createdatabaseおよびcreateTableコマンドを使用します。 2)基本操作:挿入、更新、削除、選択。 3)高度な操作:参加、サブクエリ、トランザクション処理。 4)デバッグスキル:構文、データ型、およびアクセス許可を確認します。 5)最適化の提案:インデックスを使用し、選択*を避け、トランザクションを使用します。
 INNODBのクラスターインデックスと非クラスターインデックス(セカンダリインデックス)の違い。
Apr 02, 2025 pm 06:25 PM
INNODBのクラスターインデックスと非クラスターインデックス(セカンダリインデックス)の違い。
Apr 02, 2025 pm 06:25 PM
クラスター化されたインデックスと非クラスター化されたインデックスの違いは次のとおりです。1。クラスター化されたインデックスは、インデックス構造にデータを保存します。これは、プライマリキーと範囲でクエリするのに適しています。 2.非クラスター化されたインデックスストアは、インデックスキー値とデータの行へのポインターであり、非プリマリーキー列クエリに適しています。
 MySQLユーザーとデータベースの関係
Apr 08, 2025 pm 07:15 PM
MySQLユーザーとデータベースの関係
Apr 08, 2025 pm 07:15 PM
MySQLデータベースでは、ユーザーとデータベースの関係は、アクセス許可と表によって定義されます。ユーザーには、データベースにアクセスするためのユーザー名とパスワードがあります。許可は助成金コマンドを通じて付与され、テーブルはCreate Tableコマンドによって作成されます。ユーザーとデータベースの関係を確立するには、データベースを作成し、ユーザーを作成してから許可を付与する必要があります。
 mysqlとmariadbは共存できますか
Apr 08, 2025 pm 02:27 PM
mysqlとmariadbは共存できますか
Apr 08, 2025 pm 02:27 PM
MySQLとMariaDBは共存できますが、注意して構成する必要があります。重要なのは、さまざまなポート番号とデータディレクトリを各データベースに割り当て、メモリ割り当てやキャッシュサイズなどのパラメーターを調整することです。接続プーリング、アプリケーションの構成、およびバージョンの違いも考慮する必要があり、落とし穴を避けるために慎重にテストして計画する必要があります。 2つのデータベースを同時に実行すると、リソースが制限されている状況でパフォーマンスの問題を引き起こす可能性があります。
 さまざまなタイプのMySQLインデックス(Bツリー、ハッシュ、フルテキスト、空間)を説明します。
Apr 02, 2025 pm 07:05 PM
さまざまなタイプのMySQLインデックス(Bツリー、ハッシュ、フルテキスト、空間)を説明します。
Apr 02, 2025 pm 07:05 PM
MySQLは、Bツリー、ハッシュ、フルテキスト、および空間の4つのインデックスタイプをサポートしています。 1.B-Treeインデックスは、等しい値検索、範囲クエリ、ソートに適しています。 2。ハッシュインデックスは、等しい値検索に適していますが、範囲のクエリとソートをサポートしていません。 3.フルテキストインデックスは、フルテキスト検索に使用され、大量のテキストデータの処理に適しています。 4.空間インデックスは、地理空間データクエリに使用され、GISアプリケーションに適しています。
