

【理论】支持向量机2: Support Vector 介绍支持向量机目标

【原文:http://blog.pluskid.org/?p=682】 上一次介绍支持向量机,结果说到 Maximum Margin Classifier ,到最后都没有说“支持向量”到底是什么东西。不妨回忆一下上次最后一张图: 可以看到两个支撑着中间的 gap 的超平面,它们到中间的 separating hyper
【原文:http://blog.pluskid.org/?p=682】
上一次介绍支持向量机,结果说到 Maximum Margin Classifier ,到最后都没有说“支持向量”到底是什么东西。不妨回忆一下上次最后一张图:

可以看到两个支撑着中间的 gap 的超平面,它们到中间的 separating hyper plane 的距离相等(想想看:为什么一定是相等的?),即我们所能得到的最大的 geometrical margin
很显然,由于这些 supporting vector 刚好在边界上,所以它们是满足
当然,除了从几何直观上之外,支持向量的概念也会从其优化过程的推导中得到。其实上一次还偷偷卖了另一个关子就是虽然给出了目标函数,却没有讲怎么来求解。现在就让我们来处理这个问题。回忆一下之前得到的目标函数:
这个问题等价于(为了方便求解,我在这里加上了平方,还有一个系数,显然这两个问题是等价的,因为我们关心的并不是最优情况下目标函数的具体数值):
到这个形式以后,就可以很明显地看出来,它是一个凸优化问题,或者更具体地说,它是一个二次优化问题——目标函数是二次的,约束条件是线性的。这个问题可以用任何现成的 QP (Quadratic Programming) 的优化包进行求解。所以,我们的问题到此为止就算全部解决了,于是我睡午觉去了~ 
啊?呃,有人说我偷懒不负责任了?好吧,嗯,其实呢,虽然这个问题确实是一个标准的 QP 问题,但是它也有它的特殊结构,通过 Lagrange Duality 变换到对偶变量 (dual variable) 的优化问题之后,可以找到一种更加有效的方法来进行求解——这也是 SVM 盛行的一大原因,通常情况下这种方法比直接使用通用的 QP 优化包进行优化要高效得多。此外,在推导过程中,许多有趣的特征也会被揭露出来,包括刚才提到的 supporting vector 的问题。
关于 Lagrange duality 我没有办法在这里细讲了,可以参考 Wikipedia 。简单地来说,通过给每一个约束条件加上一个 Lagrange multiplier,我们可以将它们融和到目标函数里去
然后我们令
容易验证,当某个约束条件不满足时,例如
这里用
当然,交换以后的问题不再等价于原问题,这个新问题的最优值用 总之,第二个问题的最优值
首先要让
带回
此时我们得到关于 dual variable
如前面所说,这个问题有更加高效的优化算法,不过具体方法在这里先不介绍,让我们先来看看推导过程中得到的一些有趣的形式。首先就是关于我们的 hyper plane ,对于一个数据点
这里的形式的有趣之处在于,对于新点
为什么非支持向量对应的
注意到如果 
嗯,于是呢,把所有的这些东西整合起来,得到的一个 maximum margin hyper plane classifier 就是支持向量机(Support Vector Machine),经过直观的感觉和数学上的推导,为什么叫“支持向量”,应该也就明了了吧?当然,到目前为止,我们的 SVM 还比较弱,只能处理线性的情况,不过,在得到了 dual 形式之后,通过 Kernel 推广到非线性的情况就变成了一件非常容易的事情了。不过,具体细节,还要留到下一次再细说了。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7455
7455
 15
1375
52
77
11
14
9
15
1375
52
77
11
14
9

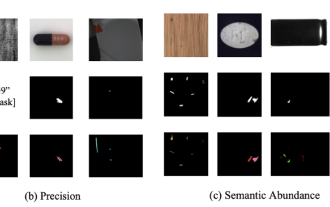 「Defect Spectrum」は、従来の欠陥検出の限界を打ち破り、超高精度かつ豊富なセマンティックな産業用欠陥検出を初めて実現します。
Jul 26, 2024 pm 05:38 PM
「Defect Spectrum」は、従来の欠陥検出の限界を打ち破り、超高精度かつ豊富なセマンティックな産業用欠陥検出を初めて実現します。
Jul 26, 2024 pm 05:38 PM
現代の製造において、正確な欠陥検出は製品の品質を確保するための鍵であるだけでなく、生産効率を向上させるための核心でもあります。ただし、既存の欠陥検出データセットには、実際のアプリケーションに必要な精度や意味論的な豊富さが欠けていることが多く、その結果、モデルが特定の欠陥カテゴリや位置を識別できなくなります。この問題を解決するために、広州香港科技大学と Simou Technology で構成されるトップの研究チームは、産業欠陥に関する詳細かつ意味的に豊富な大規模なアノテーションを提供する「DefectSpectrum」データセットを革新的に開発しました。表 1 に示すように、他の産業データ セットと比較して、「DefectSpectrum」データ セットは最も多くの欠陥注釈 (5438 個の欠陥サンプル) と最も詳細な欠陥分類 (125 個の欠陥カテゴリ) を提供します。
 NVIDIA 対話モデル ChatQA はバージョン 2.0 に進化し、コンテキストの長さは 128K と記載されています
Jul 26, 2024 am 08:40 AM
NVIDIA 対話モデル ChatQA はバージョン 2.0 に進化し、コンテキストの長さは 128K と記載されています
Jul 26, 2024 am 08:40 AM
オープンな LLM コミュニティは百花繚乱の時代です Llama-3-70B-Instruct、QWen2-72B-Instruct、Nemotron-4-340B-Instruct、Mixtral-8x22BInstruct-v0.1 などがご覧いただけます。優秀なパフォーマーモデル。しかし、GPT-4-Turboに代表される独自の大型モデルと比較すると、オープンモデルには依然として多くの分野で大きなギャップがあります。一般的なモデルに加えて、プログラミングと数学用の DeepSeek-Coder-V2 や視覚言語タスク用の InternVL など、主要な領域に特化したいくつかのオープン モデルが開発されています。
 Google AI が IMO 数学オリンピック銀メダルを獲得、数理推論モデル AlphaProof が発売、強化学習が復活
Jul 26, 2024 pm 02:40 PM
Google AI が IMO 数学オリンピック銀メダルを獲得、数理推論モデル AlphaProof が発売、強化学習が復活
Jul 26, 2024 pm 02:40 PM
AI にとって、数学オリンピックはもはや問題ではありません。木曜日、Google DeepMind の人工知能は、AI を使用して今年の国際数学オリンピック IMO の本当の問題を解決するという偉業を達成し、金メダル獲得まであと一歩のところまで迫りました。先週終了したばかりの IMO コンテストでは、代数、組合せ論、幾何学、数論を含む 6 つの問題が出題されました。 Googleが提案したハイブリッドAIシステムは4問正解で28点を獲得し、銀メダルレベルに達した。今月初め、UCLA 終身教授のテレンス・タオ氏が、100 万ドルの賞金をかけて AI 数学オリンピック (AIMO Progress Award) を宣伝したばかりだったが、予想外なことに、AI の問題解決のレベルは 7 月以前にこのレベルまで向上していた。 IMO に関する質問を同時に行うのが最も難しいのは、最も歴史が長く、規模が最も大きく、最も否定的な IMO です。
 自然の視点: 医療における人工知能のテストは混乱に陥っています。何をすべきでしょうか?
Aug 22, 2024 pm 04:37 PM
自然の視点: 医療における人工知能のテストは混乱に陥っています。何をすべきでしょうか?
Aug 22, 2024 pm 04:37 PM
編集者 | ScienceAI 限られた臨床データに基づいて、何百もの医療アルゴリズムが承認されています。科学者たちは、誰がツールをテストすべきか、そしてどのようにテストするのが最善かについて議論しています。デビン シン氏は、救急治療室で小児患者が治療を長時間待っている間に心停止に陥るのを目撃し、待ち時間を短縮するための AI の応用を模索するようになりました。 SickKids 緊急治療室からのトリアージ データを使用して、Singh 氏らは潜在的な診断を提供し、検査を推奨する一連の AI モデルを構築しました。ある研究では、これらのモデルにより医師の診察が 22.3% 短縮され、医療検査が必要な患者 1 人あたりの結果の処理が 3 時間近く高速化できることが示されました。ただし、研究における人工知能アルゴリズムの成功は、これを証明するだけです。
 結晶相問題を解決するための数百万の結晶データを使用したトレーニング、深層学習手法 PhAI が Science 誌に掲載
Aug 08, 2024 pm 09:22 PM
結晶相問題を解決するための数百万の結晶データを使用したトレーニング、深層学習手法 PhAI が Science 誌に掲載
Aug 08, 2024 pm 09:22 PM
編集者 |KX 今日に至るまで、単純な金属から大きな膜タンパク質に至るまで、結晶学によって決定される構造の詳細と精度は、他のどの方法にも匹敵しません。しかし、最大の課題、いわゆる位相問題は、実験的に決定された振幅から位相情報を取得することのままです。デンマークのコペンハーゲン大学の研究者らは、結晶相の問題を解決するための PhAI と呼ばれる深層学習手法を開発しました。数百万の人工結晶構造とそれに対応する合成回折データを使用して訓練された深層学習ニューラル ネットワークは、正確な電子密度マップを生成できます。この研究では、この深層学習ベースの非経験的構造解法は、従来の非経験的計算法とは異なり、わずか 2 オングストロームの解像度で位相問題を解決できることが示されています。これは、原子解像度で利用可能なデータのわずか 10% ~ 20% に相当します。
 新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
編集者 |ScienceAI 質問応答 (QA) データセットは、自然言語処理 (NLP) 研究を促進する上で重要な役割を果たします。高品質の QA データ セットは、モデルの微調整に使用できるだけでなく、大規模言語モデル (LLM) の機能、特に科学的知識を理解し推論する能力を効果的に評価することもできます。現在、医学、化学、生物学、その他の分野をカバーする多くの科学 QA データ セットがありますが、これらのデータ セットにはまだいくつかの欠点があります。まず、データ形式は比較的単純で、そのほとんどが多肢選択式の質問であり、評価は簡単ですが、モデルの回答選択範囲が制限され、科学的な質問に回答するモデルの能力を完全にテストすることはできません。対照的に、自由回答型の Q&A
 最適な分子を自動的に特定し、合成コストを削減する MIT は、分子設計の意思決定アルゴリズム フレームワークを開発します。
Jun 22, 2024 am 06:43 AM
最適な分子を自動的に特定し、合成コストを削減する MIT は、分子設計の意思決定アルゴリズム フレームワークを開発します。
Jun 22, 2024 am 06:43 AM
編集者 | 創薬の合理化における Ziluo AI の利用は爆発的に増加しています。新薬の開発に必要な特性を備えている可能性のある候補分子を数十億個スクリーニングします。材料の価格からエラーのリスクまで、考慮すべき変数が非常に多いため、たとえ科学者が AI を使用したとしても、最適な候補分子の合成コストを秤量することは簡単な作業ではありません。ここで、MIT の研究者は、最適な分子候補を自動的に特定する定量的意思決定アルゴリズム フレームワークである SPARROW を開発しました。これにより、合成コストを最小限に抑えながら、候補が望ましい特性を持つ可能性を最大限に高めることができます。このアルゴリズムは、これらの分子を合成するために必要な材料と実験手順も決定しました。 SPARROW では、複数の候補分子が入手可能な場合が多いため、分子のバッチを一度に合成するコストが考慮されます。
 SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
編集者 | KX 医薬品の研究開発の分野では、タンパク質とリガンドの結合親和性を正確かつ効果的に予測することが、医薬品のスクリーニングと最適化にとって重要です。しかし、現在の研究では、タンパク質とリガンドの相互作用における分子表面情報の重要な役割が考慮されていません。これに基づいて、アモイ大学の研究者らは、初めてタンパク質の表面、3D 構造、配列に関する情報を組み合わせ、クロスアテンション メカニズムを使用して異なるモダリティの特徴を比較する、新しいマルチモーダル特徴抽出 (MFE) フレームワークを提案しました。アライメント。実験結果は、この方法がタンパク質-リガンド結合親和性の予測において最先端の性能を達成することを実証しています。さらに、アブレーション研究は、この枠組み内でのタンパク質表面情報と多峰性特徴の位置合わせの有効性と必要性を実証しています。 「S」で始まる関連研究
