

金融人工知能における C++ ニューラル ネットワーク モデルの実装

C++ は、優れたパフォーマンスとメモリ管理により、ニューラル ネットワークの実装に適しています。ニューラル ネットワーク モデルは、TensorFlow や Eigen などのニューラル ネットワーク ライブラリを使用して、入力層、隠れ層、出力層を含めて構築できます。ニューラル ネットワークは、順伝播、損失の計算、逆伝播、重み更新を含む逆伝播アルゴリズムを通じてトレーニングされます。株価予測の実際のケースでは、入力データと出力データを定義し、ニューラル ネットワークを作成し、予測関数を使用して新しい株価を予測できます。

金融人工知能における C++ ニューラル ネットワーク モデルの実装
はじめに
ニューラル ネットワークは金融人工知能の重要な部分であり、市場動向の予測、投資ポートフォリオの最適化、不正行為の検出に使用されます。この記事では、C++ を使用してニューラル ネットワーク モデルを実装およびトレーニングする方法を紹介し、実際のケースを示します。
C++ とニューラル ネットワーク ライブラリ
C++ は、その高いパフォーマンスとメモリ管理機能により、ニューラル ネットワークの実装に適しています。次のようなさまざまな C++ ニューラル ネットワーク ライブラリが利用可能です:
- TensorFlow
- PyTorch
- Eigen
ニューラル ネットワーク モデルの構築
基本的なニューラル ネットワーク モデルには、入力層、隠れ層、出力層が含まれます。各層は、重みとバイアスを適用して入力に線形変換を実行するニューロンで構成されます。次に、結果は ReLU やシグモイドなどのアクティベーション関数に渡されます。
ニューラル ネットワークのトレーニング
ニューラル ネットワークは、バックプロパゲーション アルゴリズムを介してトレーニングされます。このプロセスには以下が含まれます:
- 順伝播: 入力がモデルに渡され、出力が計算されます。
- 損失の計算: モデルの出力と期待される出力を比較し、損失関数の値を計算します。
- バックプロパゲーション: 重みとバイアスに関する損失の勾配を計算します。
- 重みを更新: 勾配降下アルゴリズムを使用して重みを更新し、損失を最小限に抑えます。
実際のケース: 株価の予測
ニューラル ネットワーク モデルを使用して株価を予測する実際のケースを考えてみましょう。その方法は次のとおりです:
#include <eigen3/Eigen/Dense>
#include <iostream>
using namespace Eigen;
int main() {
// 定义输入数据
MatrixXd inputs = MatrixXd::Random(100, 10);
// 定义输出数据
MatrixXd outputs = MatrixXd::Random(100, 1);
// 创建和训练神经网络
NeuralNetwork network;
network.AddLayer(10, "relu");
network.AddLayer(1, "linear");
network.Train(inputs, outputs);
// 预测新股票价格
MatrixXd newInput = MatrixXd::Random(1, 10);
MatrixXd prediction = network.Predict(newInput);
std::cout << "Predicted stock price: " << prediction << std::endl;
return 0;
}以上が金融人工知能における C++ ニューラル ネットワーク モデルの実装の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7751
7751
 15
1643
14
1398
52
1293
25
1234
29
15
1643
14
1398
52
1293
25
1234
29

 GNN の基礎、フロンティア、および応用
Apr 11, 2023 pm 11:40 PM
GNN の基礎、フロンティア、および応用
Apr 11, 2023 pm 11:40 PM
グラフ ニューラル ネットワーク (GNN) は、近年急速かつ驚くべき進歩を遂げています。グラフ ニューラル ネットワークは、グラフ ディープ ラーニング、グラフ表現学習 (グラフ表現学習)、または幾何学的ディープ ラーニングとも呼ばれ、機械学習、特にディープ ラーニングの分野で最も急速に成長している研究トピックです。この共有のタイトルは「GNN の基礎、フロンティア、および応用」です。主に、学者の Wu Lingfei、Cui Peng、Pei Jian、Zhao によって編纂された包括的な書籍「グラフ ニューラル ネットワークの基礎、フロンティア、およびアプリケーション」の一般的な内容を紹介します。梁さん。 1. グラフ ニューラル ネットワークの概要 1. なぜグラフを学ぶのですか?グラフは、複雑なシステムを記述およびモデル化するための汎用言語です。グラフ自体は複雑ではなく、主にエッジとノードで構成されています。ノードを使用してモデル化したい任意のオブジェクトを表現し、エッジを使用して 2 つのオブジェクトを表現できます。
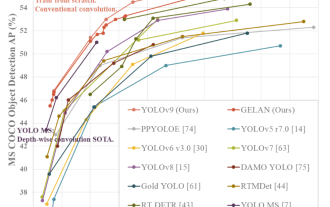 YOLOは不滅です! YOLOv9 がリリースされました: パフォーマンスとスピード SOTA~
Feb 26, 2024 am 11:31 AM
YOLOは不滅です! YOLOv9 がリリースされました: パフォーマンスとスピード SOTA~
Feb 26, 2024 am 11:31 AM
現在の深層学習手法は、モデルの予測結果が実際の状況に最も近くなるように、最適な目的関数を設計することに重点を置いています。同時に、予測に十分な情報を取得するには、適切なアーキテクチャを設計する必要があります。既存の方法は、入力データがレイヤーごとの特徴抽出と空間変換を受けると、大量の情報が失われるという事実を無視しています。この記事では、ディープネットワークを介してデータを送信する際の重要な問題、つまり情報のボトルネックと可逆機能について詳しく説明します。これに基づいて、深層ネットワークが複数の目的を達成するために必要なさまざまな変化に対処するために、プログラマブル勾配情報 (PGI) の概念が提案されています。 PGI は、目的関数を計算するためのターゲット タスクに完全な入力情報を提供することで、ネットワークの重みを更新するための信頼できる勾配情報を取得できます。さらに、新しい軽量ネットワーク フレームワークが設計されています。
 自動運転用の 3 つの主流チップ アーキテクチャの概要を 1 つの記事でまとめたもの
Apr 12, 2023 pm 12:07 PM
自動運転用の 3 つの主流チップ アーキテクチャの概要を 1 つの記事でまとめたもの
Apr 12, 2023 pm 12:07 PM
現在主流の AI チップは主に GPU、FPGA、ASIC の 3 つのカテゴリに分類されます。 GPU と FPGA はどちらも比較的成熟した初期段階のチップ アーキテクチャであり、汎用チップです。 ASIC は、特定の AI シナリオ向けにカスタマイズされたチップです。業界は、CPU が AI コンピューティングには適していないことを確認していますが、CPU は AI アプリケーションにも不可欠です。 GPU ソリューション アーキテクチャ GPU と CPU の比較 CPU はフォン ノイマン アーキテクチャに従っており、そのコアはプログラム/データのストレージとシリアル シーケンシャル実行です。したがって、CPU アーキテクチャは、記憶装置 (Cache) と制御装置 (Control) を配置するために大きなスペースを必要としますが、演算装置 (ALU) が占める割合は小さいため、CPU は大規模な処理を実行します。並列コンピューティング。
 「Bilibili UP のオーナーは世界初のレッドストーン ベースのニューラル ネットワークの作成に成功しました。これはソーシャル メディアでセンセーションを巻き起こし、Yann LeCun によって賞賛されました。」
May 07, 2023 pm 10:58 PM
「Bilibili UP のオーナーは世界初のレッドストーン ベースのニューラル ネットワークの作成に成功しました。これはソーシャル メディアでセンセーションを巻き起こし、Yann LeCun によって賞賛されました。」
May 07, 2023 pm 10:58 PM
マインクラフトにおいて、レッドストーンは非常に重要なアイテムです。これはゲーム内でユニークなマテリアルであり、スイッチ、レッドストーン トーチ、レッドストーン ブロックは、ワイヤーやオブジェクトに電気のようなエネルギーを供給できます。レッドストーン回路は、他の機械を制御または起動するための構造を構築するために使用できます。回路自体は、プレイヤーによる手動の起動に応答するように設計することも、信号を繰り返し出力したり、クリーチャーの動きなどの非プレイヤーによって引き起こされる変化に応答したりすることもできます落下、植物の成長、昼と夜など。したがって、私の世界では、レッドストーンは、自動ドア、照明スイッチ、ストロボ電源などの単純な機械から、巨大なエレベーター、自動農場、小型ゲームプラットフォーム、さらにはゲーム内マシンに至るまで、非常に多くの種類の機械を制御できます。 。最近はB局UPメイン@
 強風にも耐えられるドローン?カリフォルニア工科大学は 12 分間の飛行データを使用して、ドローンに風に乗って飛行するよう教えています
Apr 09, 2023 pm 11:51 PM
強風にも耐えられるドローン?カリフォルニア工科大学は 12 分間の飛行データを使用して、ドローンに風に乗って飛行するよう教えています
Apr 09, 2023 pm 11:51 PM
傘が飛ばされるほど風が強いとき、ドローンは次のように安定しています: 風に乗って飛行することは、空中で飛行することの一部です。大きなレベルから見ると、パイロットが航空機を着陸させるとき、風速は小規模なレベルでは、強風もドローンの飛行に影響を与える可能性があります。現在、ドローンは無風の制御された条件下で飛行するか、人間がリモコンを使用して操作します。ドローンは研究者によって制御され、大空で編隊を組んで飛行しますが、これらの飛行は通常、理想的な条件と環境の下で行われます。ただし、ドローンが荷物の配達など、必要ではあるが日常的なタスクを自律的に実行するには、風の状況にリアルタイムで適応できなければなりません。風を受けて飛行する際のドローンの操作性を高めるために、カリフォルニア工科大学のエンジニアのチームが
 マルチパス、マルチドメイン、すべてを網羅! Google AI がマルチドメイン学習一般モデル MDL をリリース
May 28, 2023 pm 02:12 PM
マルチパス、マルチドメイン、すべてを網羅! Google AI がマルチドメイン学習一般モデル MDL をリリース
May 28, 2023 pm 02:12 PM
視覚タスク (画像分類など) の深層学習モデルは、通常、単一の視覚領域 (自然画像やコンピューター生成画像など) からのデータを使用してエンドツーエンドでトレーニングされます。一般に、複数のドメインのビジョン タスクを完了するアプリケーションは、個別のドメインごとに複数のモデルを構築し、それらを個別にトレーニングする必要があります。データは異なるドメイン間で共有されません。推論中、各モデルは特定のドメインの入力データを処理します。たとえそれらが異なる分野を指向しているとしても、これらのモデル間の初期層のいくつかの機能は類似しているため、これらのモデルの共同トレーニングはより効率的です。これにより、遅延と消費電力が削減され、各モデル パラメーターを保存するためのメモリ コストが削減されます。このアプローチはマルチドメイン学習 (MDL) と呼ばれます。さらに、MDL モデルは単一モデルよりも優れたパフォーマンスを発揮します。
 1.3ミリ秒には1.3ミリ秒かかります。清華社の最新オープンソース モバイル ニューラル ネットワーク アーキテクチャ RepViT
Mar 11, 2024 pm 12:07 PM
1.3ミリ秒には1.3ミリ秒かかります。清華社の最新オープンソース モバイル ニューラル ネットワーク アーキテクチャ RepViT
Mar 11, 2024 pm 12:07 PM
論文のアドレス: https://arxiv.org/abs/2307.09283 コードのアドレス: https://github.com/THU-MIG/RepViTRepViT は、モバイル ViT アーキテクチャで優れたパフォーマンスを発揮し、大きな利点を示します。次に、この研究の貢献を検討します。記事では、主にモデルがグローバル表現を学習できるようにするマルチヘッド セルフ アテンション モジュール (MSHA) のおかげで、軽量 ViT は一般的に視覚タスクにおいて軽量 CNN よりも優れたパフォーマンスを発揮すると述べられています。ただし、軽量 ViT と軽量 CNN のアーキテクチャの違いは十分に研究されていません。この研究では、著者らは軽量の ViT を効果的なシステムに統合しました。
 Zhuanzhuan における対照学習アルゴリズムの実践
Apr 11, 2023 pm 09:25 PM
Zhuanzhuan における対照学習アルゴリズムの実践
Apr 11, 2023 pm 09:25 PM
1 対照学習とは 1.1 対照学習の定義 1.2 対照学習の原理 1.3 古典的な対照学習アルゴリズム シリーズ 2 対照学習の応用 3 Zhuanzhuan における対照学習の実践 3.1 推奨想起における CL の実践 3.2 Zhuanzhuan における CL の将来計画 1 とは1.1 対照学習の定義 対照学習 (CL) は、近年 AI 分野で人気のある研究方向であり、多くの研究者から注目を集めており、その自己教師あり学習手法は ICLR 2020 で Bengio によって発表されました。彼とルカンや他の偉人たちはそれをAIの未来と名付け、その後NIPS、ACL、
