

Go sync.WaitGroup と調整の問題

この投稿は、Go での同時実行性の処理に関するシリーズの一部です:
- 同期に進みます。Mutex: 通常モードと飢餓モード
- sync.WaitGroup と調整の問題 (ここにあります) に進みます
- 同期プールとその背後にある仕組み
- 最も見落とされている同期メカニズムである sync.Cond を実行してください
- Go sync.Map: 適切な仕事に適したツール
- Go Singleflight は DB ではなくコードに溶け込みます
WaitGroup は基本的に、複数のゴルーチンが作業を完了するのを待つ方法です。
各同期プリミティブには独自の問題があり、これも例外ではありません。ここでは、WaitGroup の調整の問題に焦点を当てます。そのため、内部構造がバージョンごとに変更されています。
この記事は Go 1.23 に基づいています。今後何か変化があった場合は、X(@func25) を通じてお気軽にお知らせください。
sync.WaitGroupとは何ですか?
すでに sync.WaitGroup に精通している場合は、そのまま読み飛ばしてください。
まず問題に飛び込んでみましょう。大きな仕事を抱えているので、それを相互に依存せずに同時に実行できる小さなタスクに分割することにしたとします。
これを処理するには、ゴルーチンを使用します。ゴルーチンを使用すると、これらの小さなタスクを同時に実行できるためです。
func main() {
for i := 0; i < 10; i++ {
go func(i int) {
fmt.Println("Task", i)
}(i)
}
fmt.Println("Done")
}
// Output:
// Done
しかし、ここが問題です。他のゴルーチンが作業を完了する前に、メインのゴルーチンが終了して終了する可能性が十分にあります。
多くのゴルーチンをスピンオフしてそれぞれの処理を実行するとき、メインのゴルーチンが終了して他のゴルーチンが終了する前に終了しないように、それらを追跡したいと考えています。ここで WaitGroup が登場します。ゴルーチンの 1 つがそのタスクを終了するたびに、WaitGroup に通知します。
すべてのゴルーチンが「完了」としてチェックインされると、メインのゴルーチンは安全に終了できることがわかり、すべてがきれいに終了します。
func main() {
var wg sync.WaitGroup
wg.Add(10)
for i := 0; i < 10; i++ {
go func(i int) {
defer wg.Done()
fmt.Println("Task", i)
}(i)
}
wg.Wait()
fmt.Println("Done")
}
// Output:
// Task 0
// Task 1
// Task 2
// Task 3
// Task 4
// Task 5
// Task 6
// Task 7
// Task 8
// Task 9
// Done
一般的には次のようになります:
- ゴルーチンの追加: ゴルーチンを開始する前に、予想されるゴルーチンの数を WaitGroup に伝えます。これは、WaitGroup.Add(n) を使用して行います。n は、実行する予定のゴルーチンの数です。
- Goroutines running: 各 goroutine が起動し、それぞれの処理を実行します。それが完了したら、WaitGroup.Done() を呼び出してカウンターを 1 つ減らすことで、WaitGroup に通知する必要があります。
- すべてのゴルーチンを待機: メインのゴルーチン (重い処理を行わないゴルーチン) で、WaitGroup.Wait() を呼び出します。これにより、WaitGroup 内のカウンターがゼロになるまで、メインの goroutine が一時停止されます。わかりやすく言えば、他のすべてのゴルーチンが終了し、完了の合図が行われるまで待機します。
通常、ゴルーチンを起動するときに WaitGroup.Add(1) が使用されていることがわかります。
for i := 0; i < 10; i++ {
wg.Add(1)
go func() {
defer wg.Done()
...
}()
}
どちらの方法も技術的には問題ありませんが、wg.Add(1) を使用するとパフォーマンスに若干の影響があります。それでも、wg.Add(n).
を使用する場合に比べて、エラーが発生する可能性は低くなります。「wg.Add(n) はエラーが発生しやすいと考えられるのはなぜですか?」
重要なのは、誰かが特定の反復をスキップする continue ステートメントを追加した場合など、ループのロジックが途中で変更された場合、状況が混乱する可能性があるということです。
wg.Add(10)
for i := 0; i < 10; i++ {
if someCondition(i) {
continue
}
go func() {
defer wg.Done()
...
}()
}
この例では、ループが常に正確に n 個のゴルーチンを開始すると仮定して、ループの前に wg.Add(n) を使用しています。
しかし、一部の反復がスキップされた場合など、その仮定が当てはまらない場合、プログラムは開始されていないゴルーチンを待機している状態でスタックする可能性があります。正直に言うと、これは追跡するのが非常に困難な種類のバグです。
この場合、wg.Add(1) の方が適しています。パフォーマンスのオーバーヘッドがわずかに発生する可能性がありますが、人的エラーのオーバーヘッドに対処するよりもはるかに優れています。
sync.WaitGroup を使用するときによくある間違いもあります。
for i := 0; i < 10; i++ {
go func() {
wg.Add(1)
defer wg.Done()
...
}()
}
結局のところ、wg.Add(1) はゴルーチンの内部で呼び出されています。メインの goroutine が wg.Wait() を呼び出した後で goroutine が実行を開始する可能性があるため、これが問題になる可能性があります。
これにより、あらゆる種類のタイミングの問題が発生する可能性があります。また、上記のすべての例では wg.Done() で defer を使用していることに気づいたでしょう。実際、複数のリターン パスやパニック リカバリの問題を回避するには、defer とともに使用して、常に呼び出され、呼び出し元を無期限にブロックしないようにする必要があります。
これで基本はすべてカバーできるはずです。
sync.WaitGroup はどのように見えるか?
まず、sync.WaitGroup のソース コードをチェックアウトしましょう。 sync.Mutex にも同様のパターンがあることがわかります。
繰り返しになりますが、ミューテックスの仕組みに詳しくない場合は、まずこの記事「Go Sync Mutex: Normal & Starvation Mode」を参照することを強くお勧めします。
type WaitGroup struct {
noCopy noCopy
state atomic.Uint64
sema uint32
}
type noCopy struct{}
func (*noCopy) Lock() {}
func (*noCopy) Unlock() {}
Go では、構造体を別の変数に代入するだけで簡単にコピーできます。ただし、WaitGroup などの一部の構造体は実際にはコピーすべきではありません。
Copying a WaitGroup can mess things up because the internal state that tracks the goroutines and their synchronization can get out of sync between the copies. If you've read the mutex post, you'll get the idea, imagine what could go wrong if we copied the internal state of a mutex.
The same kind of issues can happen with WaitGroup.
noCopy
The noCopy struct is included in WaitGroup as a way to help prevent copying mistakes, not by throwing errors, but by serving as a warning. It was contributed by Aliaksandr Valialkin, CTO of VictoriaMetrics, and was introduced in change #22015.
The noCopy struct doesn't actually affect how your program runs. Instead, it acts as a marker that tools like go vet can pick up on to detect when a struct has been copied in a way that it shouldn't be.
type noCopy struct{}
func (*noCopy) Lock() {}
func (*noCopy) Unlock() {}
Its structure is super simple:
- It has no fields, so it doesn't take up any meaningful space in memory.
- It has two methods, Lock and Unlock, which do nothing (no-op). These methods are there just to work with the -copylocks checker in the go vet tool.
When you run go vet on your code, it checks to see if any structs with a noCopy field, like WaitGroup, have been copied in a way that could cause issues.
It will throw an error to let you know there might be a problem. This gives you a heads-up to fix it before it turns into a bug:
func main() {
var a sync.WaitGroup
b := a
fmt.Println(a, b)
}
// go vet:
// assignment copies lock value to b: sync.WaitGroup contains sync.noCopy
// call of fmt.Println copies lock value: sync.WaitGroup contains sync.noCopy
// call of fmt.Println copies lock value: sync.WaitGroup contains sync.noCopy
In this case, go vet will warn you about 3 different spots where the copying happens. You can try it yourself at: Go Playground.
Note that it's purely a safeguard for when we're writing and testing our code, we can still run it like normal.
Internal State
The state of a WaitGroup is stored in an atomic.Uint64 variable. You might have guessed this if you've read the mutex post, there are several things packed into this single value.

Here's how it breaks down:
- Counter (high 32 bits): This part keeps track of the number of goroutines the WaitGroup is waiting for. When you call wg.Add() with a positive value, it bumps up this counter, and when you call wg.Done(), it decreases the counter by one.
- Waiter (low 32 bits): This tracks the number of goroutines currently waiting for that counter (the high 32 bits) to hit zero. Every time you call wg.Wait(), it increases this "waiter" count. Once the counter reaches zero, it releases all the goroutines that were waiting.
Then there's the final field, sema uint32, which is an internal semaphore managed by the Go runtime.
when a goroutine calls wg.Wait() and the counter isn't zero, it increases the waiter count and then blocks by calling runtime_Semacquire(&wg.sema). This function call puts the goroutine to sleep until it gets woken up by a corresponding runtime_Semrelease(&wg.sema) call.
We'll dive deeper into this in another article, but for now, I want to focus on the alignment issues.
Alignment Problem
I know, talking about history might seem dull, especially when you just want to get to the point. But trust me, knowing the past is the best way to understand where we are now.
Let's take a quick look at how WaitGroup has evolved over several Go versions:
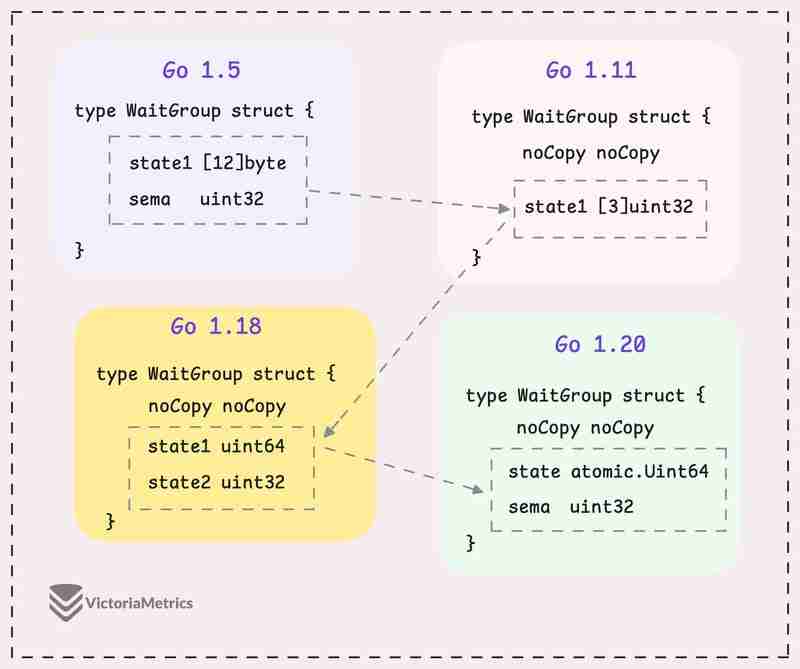
I can tell you, the core of WaitGroup (the counter, waiter, and semaphore) hasn't really changed across different Go versions. However, the way these elements are structured has been modified many times.
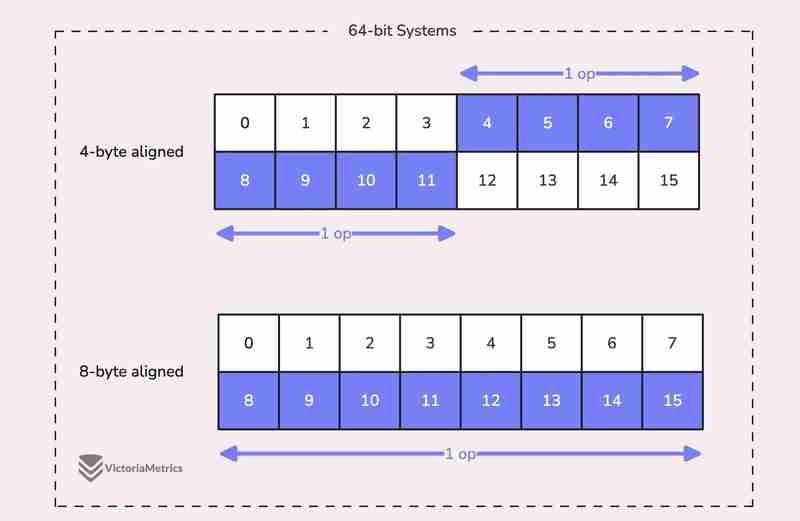
When we talk about alignment, we're referring to the need for data types to be stored at specific memory addresses to allow for efficient access.
For example, on a 64-bit system, a 64-bit value like uint64 should ideally be stored at a memory address that's a multiple of 8 bytes. The reason is, the CPU can grab aligned data in one go, but if the data isn't aligned, it might take multiple operations to access it.
Now, here's where things get tricky:
On 32-bit architectures, the compiler doesn't guarantee that 64-bit values will be aligned on an 8-byte boundary. Instead, they might only be aligned on a 4-byte boundary.
This becomes a problem when we use the atomic package to perform operations on the state variable. The atomic package specifically notes:
"On ARM, 386, and 32-bit MIPS, it is the caller's responsibility to arrange for 64-bit alignment of 64-bit words accessed atomically via the primitive atomic functions." - atomic package note
What this means is that if we don't align the state uint64 variable to an 8-byte boundary on these 32-bit architectures, it could cause the program to crash.
So, what's the fix? Let's take a look at how this has been handled across different versions.
Go 1.5: state1 [12]byte
I'd recommend taking a moment to guess the underlying logic of this solution as you read the code below, then we'll walk through it together.
type WaitGroup struct {
state1 [12]byte
sema uint32
}
func (wg *WaitGroup) state() *uint64 {
if uintptr(unsafe.Pointer(&wg.state1))%8 == 0 {
return (*uint64)(unsafe.Pointer(&wg.state1))
} else {
return (*uint64)(unsafe.Pointer(&wg.state1[4]))
}
}
Instead of directly using a uint64 for state, WaitGroup sets aside 12 bytes in an array (state1 [12]byte). This might seem like more than you'd need, but there's a reason behind it.
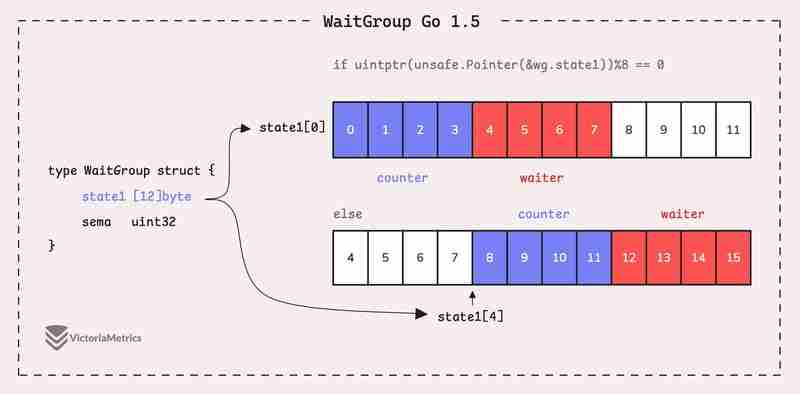
The purpose of using 12 bytes is to ensure there's enough room to find an 8-byte segment that's properly aligned.
The full post is available here: https://victoriametrics.com/blog/go-sync-waitgroup/
以上がGo sync.WaitGroup と調整の問題の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1677
1677
 14
1430
52
1333
25
1278
29
1257
24
14
1430
52
1333
25
1278
29
1257
24

 Golang vs. Python:パフォーマンスとスケーラビリティ
Apr 19, 2025 am 12:18 AM
Golang vs. Python:パフォーマンスとスケーラビリティ
Apr 19, 2025 am 12:18 AM
Golangは、パフォーマンスとスケーラビリティの点でPythonよりも優れています。 1)Golangのコンピレーションタイプの特性と効率的な並行性モデルにより、高い並行性シナリオでうまく機能します。 2)Pythonは解釈された言語として、ゆっくりと実行されますが、Cythonなどのツールを介してパフォーマンスを最適化できます。
 Golang and C:Concurrency vs. Raw Speed
Apr 21, 2025 am 12:16 AM
Golang and C:Concurrency vs. Raw Speed
Apr 21, 2025 am 12:16 AM
Golangは並行性がCよりも優れていますが、Cは生の速度ではGolangよりも優れています。 1)Golangは、GoroutineとChannelを通じて効率的な並行性を達成します。これは、多数の同時タスクの処理に適しています。 2)Cコンパイラの最適化と標準ライブラリを介して、極端な最適化を必要とするアプリケーションに適したハードウェアに近い高性能を提供します。
 ゴーを始めましょう:初心者のガイド
Apr 26, 2025 am 12:21 AM
ゴーを始めましょう:初心者のガイド
Apr 26, 2025 am 12:21 AM
goisidealforforbeginnersandsutable forcloudnetworkservicesduetoitssimplicity、andconcurrencyfeatures.1)installgofromtheofficialwebsiteandverify with'goversion'.2)
 Golang vs. C:パフォーマンスと速度の比較
Apr 21, 2025 am 12:13 AM
Golang vs. C:パフォーマンスと速度の比較
Apr 21, 2025 am 12:13 AM
Golangは迅速な発展と同時シナリオに適しており、Cは極端なパフォーマンスと低レベルの制御が必要なシナリオに適しています。 1)Golangは、ごみ収集と並行機関のメカニズムを通じてパフォーマンスを向上させ、高配列Webサービス開発に適しています。 2)Cは、手動のメモリ管理とコンパイラの最適化を通じて究極のパフォーマンスを実現し、埋め込みシステム開発に適しています。
 Golang vs. Python:重要な違いと類似点
Apr 17, 2025 am 12:15 AM
Golang vs. Python:重要な違いと類似点
Apr 17, 2025 am 12:15 AM
GolangとPythonにはそれぞれ独自の利点があります。Golangは高性能と同時プログラミングに適していますが、PythonはデータサイエンスとWeb開発に適しています。 Golangは同時性モデルと効率的なパフォーマンスで知られていますが、Pythonは簡潔な構文とリッチライブラリエコシステムで知られています。
 GolangとC:パフォーマンスのトレードオフ
Apr 17, 2025 am 12:18 AM
GolangとC:パフォーマンスのトレードオフ
Apr 17, 2025 am 12:18 AM
GolangとCのパフォーマンスの違いは、主にメモリ管理、コンピレーションの最適化、ランタイム効率に反映されています。 1)Golangのゴミ収集メカニズムは便利ですが、パフォーマンスに影響を与える可能性があります。
 パフォーマンスレース:ゴラン対c
Apr 16, 2025 am 12:07 AM
パフォーマンスレース:ゴラン対c
Apr 16, 2025 am 12:07 AM
GolangとCにはそれぞれパフォーマンス競争において独自の利点があります。1)Golangは、高い並行性と迅速な発展に適しており、2)Cはより高いパフォーマンスと微細な制御を提供します。選択は、プロジェクトの要件とチームテクノロジースタックに基づいている必要があります。
 Golang vs. Python:長所と短所
Apr 21, 2025 am 12:17 AM
Golang vs. Python:長所と短所
Apr 21, 2025 am 12:17 AM
GolangisidealforBuildingsCalables Systemsduetoitsefficiency andConcurrency、Whilepythonexcelsinquickscriptinganddataanalysisduetoitssimplicityand vastecosystem.golang'ssignencouragesclean、readisinediteNeditinesinedinediseNabletinedinedinedisedisedioncourase
