

複雑な迷路でチーズを探しているネズミを想像してみてください。行き止まりに突き当たるまでは、どの道も有望に見えます。考えられる解決策を見逃すことなく、すべてのルートを体系的に探索するにはどうすればよいでしょうか?ここで、複雑なパズルや現実世界の問題を解決するための強力なツールであるバックトラッキング アルゴリズムが登場します。
バックトラッキングは、解決策を段階的に構築し、有効な解決策に至らないパスを放棄する再帰的なアルゴリズム手法です。その重要性は、そのシンプルさと多用途性にあり、AI、ロボット工学、最適化などの分野に適用可能です。
このブログでは、バックトラッキングがどのように機能するのかを詳しく説明し、その実際の応用例を調査し、迷路の中のネズミの問題の解決に焦点を当てます。
バックトラッキングは、段階的にソリューションを構築することで問題を解決するために使用される深さ優先検索 (DFS) 手法です。パスが無効な状態になると、アルゴリズムは前のステップに「戻り」、別のオプションを試行します。
迷路内のネズミのステップ

ドメイン: ロボット工学
バックトラッキングはロボット工学、特に経路探索とナビゲーションのアルゴリズムにおいて重要な役割を果たします。自律型ロボットはこの技術を使用して未知の環境を探索し、潜在的なルートを見逃さないようにします。

チャレンジ: 迷路をナビゲートする
ロボットや捜索救助活動は迷路のような環境に直面することがよくあります。課題は、地形に関する事前知識なしで最適な経路を見つけることです。
解決策
バックトラッキング アルゴリズムにより、システムは考えられる各ルートを系統的に探索し、解決策が存在する場合には確実に解決策を見つけることができます。バックトラックして代替パスを探索することで行き止まりを処理し、動的なシナリオでの信頼性を高めます。
計算量:
バックトラッキングは、大規模または複雑な迷路で多くの不必要なパスを探索する可能性があり、非効率につながる可能性があります。
リアルタイム制約:
ロボット工学などの実世界のアプリケーションでは、速度が非常に重要です。ヒューリスティックを使用してバックトラッキングを最適化すると (特定のパスに優先順位を付けるなど)、パフォーマンスを向上させることができます。
**ケーススタディ: **自律型ドローンナビゲーション
大手ロボット会社は、被災地でのドローンの経路探索のためにバックトラッキングを導入しました。ドローンはこのアルゴリズムを使用して崩壊した構造物を移動し、障害物を回避しながら系統的に経路を探索しました。結果?閉じ込められた個人の迅速な特定と効率的なリソース割り当て。

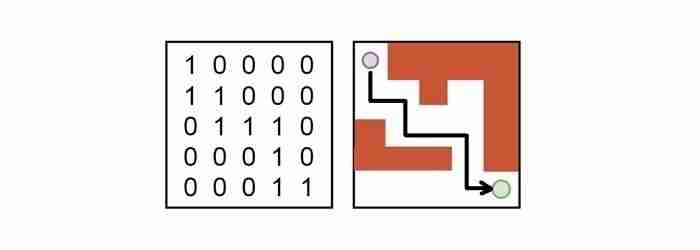
迷路図: ネズミの動きと後戻りを視覚的に表現したもの。
ツリー図: デシジョン ツリーとして表される再帰呼び出し。
解決(0, 0)
└──solve(1, 0)
└──solve(1, 1)
└──solve(2, 1)
└──solve(2, 2)
└──solve(2, 3)
└──solve(3, 3)
└──solve(4, 3)
└──solve(4, 4)(目的地)
体系的な探索: あらゆる可能性が確実に考慮されます。
シンプルさ: さまざまな問題に対して実装が簡単です。
適応性: スケジュール、謎解き、最適化の問題に適用可能

バックトラッキング アルゴリズムは問題解決の基礎であり、汎用性と信頼性の両方を提供します。ネズミがチーズを見つけるのを手伝ったり、ロボットを迷路で誘導したりするまで、その用途は広大で影響力があります。
計算ニーズが増大するにつれ、バックトラッキングの最適化により、AI システムにおけるリアルタイム ナビゲーションや複雑な意思決定などの新たな機会への扉が開かれます。そのシンプルさと力強さは、体系的な問題解決の美しさを思い出させます。
以上が方法を見つける: 迷路内のネズミのためのバックトラッキング アルゴリズムの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



