

コーナーに到達するための最小限の障害物の除去

2290。コーナーに到達するための最小限の障害物の除去
難易度: 難しい
トピック: 配列、幅優先検索、グラフ、ヒープ (優先キュー)、行列、最短パス
サイズ m x n の 0 インデックス付き 2D 整数配列グリッドが与えられます。各セルには次の 2 つの値のいずれかが含まれます:
- 0 は 空の セル、 を表します。
- 1 は、除去できる障害物を表します。
空のセルから上下左右に移動できます。
障害物の最小数を返して削除し、左上隅 (0, 0) から右下隅に移動できるようにしますコーナー (m - 1, n - 1).
例 1:

- 入力: グリッド = [[0,1,1],[1,1,0],[1,1,0]]
- 出力: 2
- 説明: (0, 1) と (0, 2) にある障害物を除去して、(0, 0) から (2, 2) までのパスを作成できます。
- 少なくとも 2 つの障害物を取り除く必要があることがわかり、2 を返します。
- 2 つの障害物を除去してパスを作成する他の方法がある可能性があることに注意してください。
例 2:
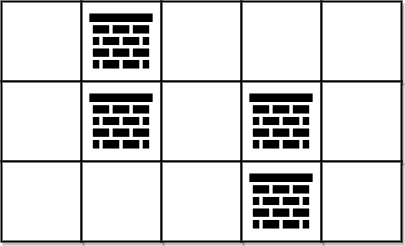
- 入力: グリッド = [[0,1,0,0,0],[0,1,0,1,0],[0,0,0,1,0]]
- 出力: 0
- 説明: 障害物を除去せずに (0, 0) から (2, 4) に移動できるため、0 を返します。
制約:
- m == グリッドの長さ
- n == グリッド[i].length
- 1 5 2 5 Grid[i][j] は 0 または 1 です。
- グリッド[0][0] == グリッド[m - 1][n - 1] == 0
ヒント:
- セルがノード、エッジが隣接するセルの間にあるグラフとしてグリッドをモデル化します。障害物のあるセルへのエッジのコストは 1 で、他のすべてのエッジのコストは 0 です。
- 0-1 幅優先検索またはダイクストラのアルゴリズムを使用していただけますか?
解決策:
グリッド内の各セルがノードであるグラフを使用して、この問題をモデル化する必要があります。目標は、削除する必要がある障害物 (1 秒) の数を最小限に抑えながら、左上隅 (0, 0) から右下隅 (m-1, n-1) までナビゲートすることです。アプローチ:
-
グラフ表現:
- グリッド内の各セルはノードです。
- 隣接するセル間の移動 (上下左右) はエッジとして扱われます。
- エッジが 1 (障害物) のセルを通過する場合、コストは 1 (障害物を取り除く)、0 (空のセル) を通過する場合、コストは 0 です。
-
アルゴリズムの選択:
- 除去される障害物の数を最小限に抑える必要があるため、0-1 BFS (両端キューを使用した幅優先検索) または優先キューを備えた ダイクストラのアルゴリズム を使用できます。
- 各エッジのコストが 0 または 1 であるため、0-1 BFS がここでは適しています。
-
0-1 BFS:
- デキュー (両端キュー) を使用して、さまざまなコストでノードを処理します。
- コスト 0 のセルを両端キューの先頭にプッシュします。
- コスト 1 のセルを両端キューの後ろにプッシュします。
- そのアイデアは、グリッドを探索し、最初に障害物の除去を必要としないパスを常に拡張し、必要な場合にのみ障害物を除去することです。
- デキュー (両端キュー) を使用して、さまざまなコストでノードを処理します。
このソリューションを PHP で実装してみましょう: 2290。コーナーに到達するための最小限の障害物の除去
<?php
/**
* @param Integer[][] $grid
* @return Integer
*/
function minimumObstacles($grid) {
...
...
...
/**
* go to ./solution.php
*/
}
// Test Case 1
$grid1 = [
[0, 1, 1],
[1, 1, 0],
[1, 1, 0]
];
echo minimumObstacles($grid1) . PHP_EOL; // Output: 2
// Test Case 2
$grid2 = [
[0, 1, 0, 0, 0],
[0, 1, 0, 1, 0],
[0, 0, 0, 1, 0]
];
echo minimumObstacles($grid2) . PHP_EOL; // Output: 0
?>
説明:
-
入力解析:
- グリッドは 2D 配列として取得されます。
- 行と列は境界チェックのために計算されます。
-
デックの実装:
- SplDoublyLinkedList は両端キューをシミュレートするために使用されます。前方 (シフト解除) または後方 (プッシュ) での要素の追加をサポートします。
-
訪問済み配列:
- 冗長な処理を避けるために、すでに訪問したセルを追跡します。
-
0-1 BFS ロジック:
- コスト 0 で (0, 0) から開始します。
- 各隣接セルについて:
- 空の場合 (grid[nx][ny] == 0)、同じコストで両端キューの先頭に追加します。
- それが障害物 (grid[nx][ny] == 1) である場合は、増加したコストで両端キューの後ろに追加します。
-
結果を返す:
- 右下隅に到達したら、コストを返します。
- 有効なパスが存在しない場合 (問題により有効なパスが存在することが保証されています)、-1 を返します。
複雑:
- 時間計算量: O(m x n)、m は行数、n は列の数です。各セルは 1 回処理されます。
- 空間複雑度: O(m x n)、訪問された配列と両端キューの場合。
この実装は、指定された制約内で効率的に動作します。
連絡先リンク
このシリーズが役立つと思われた場合は、GitHub で リポジトリ にスターを付けるか、お気に入りのソーシャル ネットワークで投稿を共有することを検討してください。あなたのサポートは私にとって大きな意味を持ちます!
このような役立つコンテンツがさらに必要な場合は、お気軽にフォローしてください:
- GitHub
以上がコーナーに到達するための最小限の障害物の除去の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7915
7915
 15
1652
14
1411
52
1303
25
1248
29
15
1652
14
1411
52
1303
25
1248
29

 JSON Web Tokens(JWT)とPHP APIでのユースケースを説明してください。
Apr 05, 2025 am 12:04 AM
JSON Web Tokens(JWT)とPHP APIでのユースケースを説明してください。
Apr 05, 2025 am 12:04 AM
JWTは、JSONに基づくオープン標準であり、主にアイデンティティ認証と情報交換のために、当事者間で情報を安全に送信するために使用されます。 1。JWTは、ヘッダー、ペイロード、署名の3つの部分で構成されています。 2。JWTの実用的な原則には、JWTの生成、JWTの検証、ペイロードの解析という3つのステップが含まれます。 3. PHPでの認証にJWTを使用する場合、JWTを生成および検証でき、ユーザーの役割と許可情報を高度な使用に含めることができます。 4.一般的なエラーには、署名検証障害、トークンの有効期限、およびペイロードが大きくなります。デバッグスキルには、デバッグツールの使用とロギングが含まれます。 5.パフォーマンスの最適化とベストプラクティスには、適切な署名アルゴリズムの使用、有効期間を合理的に設定することが含まれます。
 PHP 8.1の列挙(列挙)とは何ですか?
Apr 03, 2025 am 12:05 AM
PHP 8.1の列挙(列挙)とは何ですか?
Apr 03, 2025 am 12:05 AM
php8.1の列挙関数は、指定された定数を定義することにより、コードの明確さとタイプの安全性を高めます。 1)列挙は、整数、文字列、またはオブジェクトであり、コードの読みやすさとタイプの安全性を向上させることができます。 2)列挙はクラスに基づいており、トラバーサルや反射などのオブジェクト指向の機能をサポートします。 3)列挙を比較と割り当てに使用して、タイプの安全性を確保できます。 4)列挙は、複雑なロジックを実装するためのメソッドの追加をサポートします。 5)厳密なタイプのチェックとエラー処理は、一般的なエラーを回避できます。 6)列挙は魔法の価値を低下させ、保守性を向上させますが、パフォーマンスの最適化に注意してください。
 セッションのハイジャックはどのように機能し、どのようにPHPでそれを軽減できますか?
Apr 06, 2025 am 12:02 AM
セッションのハイジャックはどのように機能し、どのようにPHPでそれを軽減できますか?
Apr 06, 2025 am 12:02 AM
セッションハイジャックは、次の手順で達成できます。1。セッションIDを取得します。2。セッションIDを使用します。3。セッションをアクティブに保ちます。 PHPでのセッションハイジャックを防ぐための方法には次のものが含まれます。1。セッション_regenerate_id()関数を使用して、セッションIDを再生します。2。データベースを介してストアセッションデータを3。
 確固たる原則と、それらがPHP開発にどのように適用されるかを説明してください。
Apr 03, 2025 am 12:04 AM
確固たる原則と、それらがPHP開発にどのように適用されるかを説明してください。
Apr 03, 2025 am 12:04 AM
PHP開発における固体原理の適用には、次のものが含まれます。1。単一責任原則(SRP):各クラスは1つの機能のみを担当します。 2。オープンおよびクローズ原理(OCP):変更は、変更ではなく拡張によって達成されます。 3。Lischの代替原則(LSP):サブクラスは、プログラムの精度に影響を与えることなく、基本クラスを置き換えることができます。 4。インターフェイス分離原理(ISP):依存関係や未使用の方法を避けるために、細粒インターフェイスを使用します。 5。依存関係の反転原理(DIP):高レベルのモジュールと低レベルのモジュールは抽象化に依存し、依存関係噴射を通じて実装されます。
 PHPでの後期静的結合を説明します(静的::)。
Apr 03, 2025 am 12:04 AM
PHPでの後期静的結合を説明します(静的::)。
Apr 03, 2025 am 12:04 AM
静的結合(静的::) PHPで後期静的結合(LSB)を実装し、クラスを定義するのではなく、静的コンテキストで呼び出しクラスを参照できるようにします。 1)解析プロセスは実行時に実行されます。2)継承関係のコールクラスを検索します。3)パフォーマンスオーバーヘッドをもたらす可能性があります。
 REST APIデザインの原則とは何ですか?
Apr 04, 2025 am 12:01 AM
REST APIデザインの原則とは何ですか?
Apr 04, 2025 am 12:01 AM
Restapiの設計原則には、リソース定義、URI設計、HTTPメソッドの使用、ステータスコードの使用、バージョンコントロール、およびHATEOASが含まれます。 1。リソースは名詞で表され、階層で維持される必要があります。 2。HTTPメソッドは、GETを使用してリソースを取得するなど、セマンティクスに準拠する必要があります。 3.ステータスコードは、404など、リソースが存在しないことを意味します。 4。バージョン制御は、URIまたはヘッダーを介して実装できます。 5。それに応じてリンクを介してhateoasブーツクライアント操作をブーツします。
 PHPで例外を効果的に処理する方法(試して、キャッチ、最後に、スロー)?
Apr 05, 2025 am 12:03 AM
PHPで例外を効果的に処理する方法(試して、キャッチ、最後に、スロー)?
Apr 05, 2025 am 12:03 AM
PHPでは、Try、Catch、最後にキーワードをスローすることにより、例外処理が達成されます。 1)TRYブロックは、例外をスローする可能性のあるコードを囲みます。 2)キャッチブロックは例外を処理します。 3)最後にブロックは、コードが常に実行されることを保証します。 4)スローは、例外を手動でスローするために使用されます。これらのメカニズムは、コードの堅牢性と保守性を向上させるのに役立ちます。
 PHPの匿名クラスとは何ですか?また、いつ使用できますか?
Apr 04, 2025 am 12:02 AM
PHPの匿名クラスとは何ですか?また、いつ使用できますか?
Apr 04, 2025 am 12:02 AM
PHPの匿名クラスの主な機能は、1回限りのオブジェクトを作成することです。 1.匿名クラスでは、名前のないクラスをコードで直接定義することができます。これは、一時的な要件に適しています。 2。クラスを継承したり、インターフェイスを実装して柔軟性を高めることができます。 3.使用時にパフォーマンスとコードの読みやすさに注意し、同じ匿名のクラスを繰り返し定義しないようにします。
