

PyTorch の RandomPerspective

コーヒー買ってきて☕
*メモ:
- 私の投稿では RandomRotation() について説明しています。
- 私の投稿では RandomAffine() について説明しています。
- 私の投稿では RandomhorizontalFlip() について説明しています。
- 私の投稿では RandomVerticalFlip() について説明しています。
- 私の投稿では OxfordIIITPet() について説明しています。
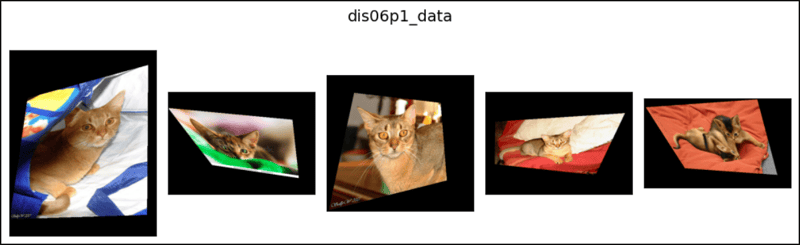
RandomPerspective() は、以下に示すように、0 個以上の画像に対して透視変換を実行できます。
*メモ:
- 初期化の最初の引数は、distortion_scale(オプション-デフォルト:0.5-タイプ:int または float) です。
*メモ:
- 透視変換を行うことができます。
- 0
- 初期化の 2 番目の引数は p(Optional-Default:0.5-Type:int または float) です。
*メモ:
- 各画像が透視変換されているかどうかの確率です。
- 0
- 初期化の 3 番目の引数は interpolation(Optional-Default:InterpolationMode.BILINEAR-Type:InterpolationMode) です。
- 初期化の 4 番目の引数は fill(Optional-Default:0-Type:int, float または tuple/list(int or float)) です。
*メモ:
- 画像の背景を変更できます。 ※画像を透視変換すると背景が見えます
- タプル/リストは 3 つの要素を持つ 1D でなければなりません。
- 第一引数(Required-Type:PIL Image or tensor(int))があります。 *3D テンソルである必要があります。
- V1 または V2 に従って v2 を使用することをお勧めしますか?どれを使えばいいのでしょうか?
from torchvision.datasets import OxfordIIITPet
from torchvision.transforms.v2 import RandomPerspective
from torchvision.transforms.functional import InterpolationMode
randompers = RandomPerspective()
randompers = RandomPerspective(distortion_scale=0.5,
p=0.5,
interpolation=InterpolationMode.BILINEAR,
fill=0)
randompers
# RandomPerspective(p=0.5,
# distortion_scale=0.5,
# interpolation=InterpolationMode.BILINEAR,
# fill=0)
randompers.distortion_scale
# 0.5
randompers.p
# 0.5
randompers.interpolation
# <InterpolationMode.BILINEAR: 'bilinear'>
randompers.fill
# 0
origin_data = OxfordIIITPet(
root="data",
transform=None
# transform=RandomPerspective(distortion_scale=0)
# transform=RandomPerspective(p=0)
)
dis02p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(distortion_scale=0.2, p=1)
)
dis06p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(distortion_scale=0.6, p=1)
)
dis1p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(distortion_scale=1, p=1)
)
p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=1)
)
p05_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=0.5)
)
p1fillgray_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=1, fill=150)
)
p1fillpurple_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=1, fill=[160, 32, 240])
)
import matplotlib.pyplot as plt
def show_images1(data, main_title=None):
plt.figure(figsize=(10, 5))
plt.suptitle(t=main_title, y=0.8, fontsize=14)
for i, (im, _) in zip(range(1, 6), data):
plt.subplot(1, 5, i)
plt.imshow(X=im)
plt.xticks(ticks=[])
plt.yticks(ticks=[])
plt.tight_layout()
plt.show()
show_images1(data=origin_data, main_title="origin_data")
show_images1(data=dis02p1_data, main_title="dis02p1_data")
show_images1(data=dis06p1_data, main_title="dis06p1_data")
show_images1(data=dis1p1_data, main_title="dis1p1_data")
show_images1(data=p1_data, main_title="p1_data")
show_images1(data=p05_data, main_title="p05_data")
show_images1(data=p1fillgray_data, main_title="p1fillgray_data")
show_images1(data=p1fillpurple_data, main_title="p1fillpurple_data")
# ↓ ↓ ↓ ↓ ↓ ↓ The code below is identical to the code above. ↓ ↓ ↓ ↓ ↓ ↓
def show_images2(data, main_title=None, d=0.5, prob=0.5, f=0):
plt.figure(figsize=(10, 5))
plt.suptitle(t=main_title, y=0.8, fontsize=14)
for i, (im, _) in zip(range(1, 6), data):
plt.subplot(1, 5, i)
rp = RandomPerspective(distortion_scale=d, p=prob, fill=f) # Here
plt.imshow(X=rp(im)) # Here
plt.xticks(ticks=[])
plt.yticks(ticks=[])
plt.tight_layout()
plt.show()
show_images2(data=origin_data, main_title="origin_data", d=0)
show_images2(data=origin_data, main_title="dis02p1_data", d=0.2, prob=1)
show_images2(data=origin_data, main_title="dis06p1_data", d=0.6, prob=1)
show_images2(data=origin_data, main_title="dis1p1_data", d=1, prob=1)
show_images2(data=origin_data, main_title="p1_data", prob=1)
show_images2(data=origin_data, main_title="p05_data", prob=0.5)
show_images2(data=origin_data, main_title="p1fillgray_data", prob=1, f=150)
show_images2(data=origin_data, main_title="p1fillpurple_data", prob=1,
f=[160, 32, 240])







以上がPyTorch の RandomPerspectiveの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7878
7878
 15
1649
14
1409
52
1301
25
1245
29
15
1649
14
1409
52
1301
25
1245
29

 LinuxターミナルでPythonバージョンを表示するときに発生する権限の問題を解決する方法は?
Apr 01, 2025 pm 05:09 PM
LinuxターミナルでPythonバージョンを表示するときに発生する権限の問題を解決する方法は?
Apr 01, 2025 pm 05:09 PM
LinuxターミナルでPythonバージョンを表示する際の許可の問題の解決策PythonターミナルでPythonバージョンを表示しようとするとき、Pythonを入力してください...
 中間の読書にどこでもfiddlerを使用するときにブラウザによって検出されないようにするにはどうすればよいですか?
Apr 02, 2025 am 07:15 AM
中間の読書にどこでもfiddlerを使用するときにブラウザによって検出されないようにするにはどうすればよいですか?
Apr 02, 2025 am 07:15 AM
fiddlereveryversings for the-middleの測定値を使用するときに検出されないようにする方法
 あるデータフレームの列全体を、Python内の異なる構造を持つ別のデータフレームに効率的にコピーする方法は?
Apr 01, 2025 pm 11:15 PM
あるデータフレームの列全体を、Python内の異なる構造を持つ別のデータフレームに効率的にコピーする方法は?
Apr 01, 2025 pm 11:15 PM
PythonのPandasライブラリを使用する場合、異なる構造を持つ2つのデータフレーム間で列全体をコピーする方法は一般的な問題です。 2つのデータがあるとします...
 uvicornは、serving_forever()なしでhttpリクエストをどのように継続的に聞いていますか?
Apr 01, 2025 pm 10:51 PM
uvicornは、serving_forever()なしでhttpリクエストをどのように継続的に聞いていますか?
Apr 01, 2025 pm 10:51 PM
UvicornはどのようにしてHTTPリクエストを継続的に聞きますか? Uvicornは、ASGIに基づく軽量のWebサーバーです。そのコア機能の1つは、HTTPリクエストを聞いて続行することです...
 プロジェクトの基本と問題駆動型の方法で10時間以内にコンピューター初心者プログラミングの基本を教える方法は?
Apr 02, 2025 am 07:18 AM
プロジェクトの基本と問題駆動型の方法で10時間以内にコンピューター初心者プログラミングの基本を教える方法は?
Apr 02, 2025 am 07:18 AM
10時間以内にコンピューター初心者プログラミングの基本を教える方法は?コンピューター初心者にプログラミングの知識を教えるのに10時間しかない場合、何を教えることを選びますか...
 Investing.comの反クローラーメカニズムをバイパスするニュースデータを取得する方法は?
Apr 02, 2025 am 07:03 AM
Investing.comの反クローラーメカニズムをバイパスするニュースデータを取得する方法は?
Apr 02, 2025 am 07:03 AM
Investing.comの反クラウリング戦略を理解する多くの人々は、Investing.com(https://cn.investing.com/news/latest-news)からのニュースデータをクロールしようとします。
