

Pytorchを使用して、Yolov11モデルの構築に関するガイド

Yolov11:最先端のオブジェクト検出モデルのアーキテクチャと実装に深く飛び込みます
yolo(1回だけを見る)モデルは、オブジェクトの検出、セグメンテーション、ポーズ推定など、コンピュータービジョンタスクの効率と精度で有名です。 この記事では、Pytorchを使用した最新のイテレーションYolov11のアーキテクチャと実装に焦点を当てています。 クリエイターである超低分類学は、正式な研究論文よりも実用的なアプリケーションに優先順位を付けますが、その設計を分析し、機能モデルを構築します。
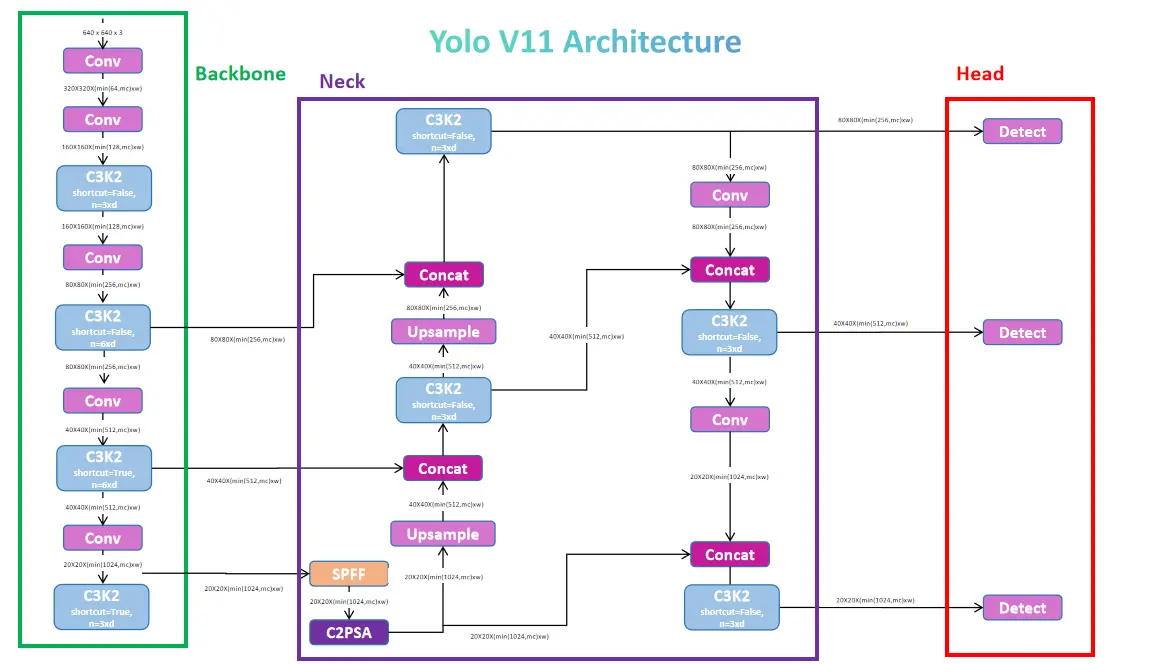
Yolov11のアーキテクチャを理解するYolov11は、その前任者と同様に、バックボーン、ネック、ヘッドの3部構成のアーキテクチャを採用しています。
バックボーン:- 効率的なボトルネックベースのブロック(C3K2、Yolov8のC2Fの改良)を使用して機能を抽出します。 DarknetとDarkFPNを活用するこのバックボーンは、さまざまなレベルの詳細を表す3つの機能マップ(P3、P4、P5)を生成します。
-
ネック:
バックボーンの出力を処理し、アップサンプリングと連結を使用して、スケール全体で特徴を融合します。 重要なコンポーネントはC2PSAブロックで、部分空間的注意(PSA)モジュールを組み込んで、低レベルの機能に関連する空間情報に焦点を当てることを強化します。 -
head:
タスク固有の予測を処理します。 オブジェクトの検出には、 が含まれます - dfl(分布焦点損失):
境界ボックスの予測を改良します。
ボックスの検出:- 境界ボックス座標を予測します。
- クラスの検出: オブジェクトクラスを予測します。 このモデルは、セグメンテーションとキーポイント検出ヘッドもサポートしています
- コアビルディングブロック:畳み込みとボトルネック層
入力データから特徴を抽出します。
ボトルネックレイヤー:ショートカット接続を備えた2つの畳み込みレイヤーを使用して、効率と学習を改善します(連結または残留追加)。
- C3KおよびC3K2モジュール:効率的な特徴抽出のための最適化された畳み込みブロック。
- sppf(空間ピラミッドプーリング速い):さまざまなサイズのオブジェクトを検出するモデルの能力を強化します。
- コード実装ハイライト(pytorch)
- 次のコードスニペットは、主要なコンポーネントを示しています:
(簡潔にするために簡略化された;完全なコードについては、元の記事を参照してください。)
# Simplified Conv Block class Conv(nn.Module): def __init__(self, in_ch, out_ch, activation, ...): # ... (Initialization code) ... def forward(self, x): return activation(self.norm(self.conv(x))) # Simplified Bottleneck Block (Residual) class Residual(nn.Module): def __init__(self, ch, e=0.5): # ... (Initialization code) ... def forward(self, x): return x + self.conv2(self.conv1(x)) # Simplified SPPF class SPPF(nn.Module): def __init__(self, c1, c2, k=5): # ... (Initialization code) ... def forward(self, x): # ... (MaxPooling and concatenation) ... return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1)) # ... (Other key blocks: C3K, C3K2, PSA, Attention, PSABlock, DFL) ...ログイン後にコピーモデルの構築とテスト
完全なYolov11モデルは、バックボーン、ネック、ヘッドを組み合わせることで構築されます。 さまざまなモデルサイズ(ナノ、小、中、大、Xlarge)は、深さや幅などのパラメーターを調整することで実現されます。 提供されたコードには、これを容易にするための
YOLOv11クラスが含まれています。 ランダム入力テンソルによるモデルテストは、出力構造を示しています(トレーニングモードの特徴マップ、評価モードでの連結予測)。 最終的なオブジェクト検出を取得するには、さらなる処理(非最大抑制)が必要です。結論
Yolov11は、オブジェクト検出の大幅な進歩を表しており、強力で効率的なアーキテクチャを提供します。 その設計は、実用的なアプリケーションに優先順位を付け、現実世界のAIプロジェクトにとって貴重なツールとなっています。 詳細なアーキテクチャとコードスニペットは、理解とさらなる開発のための強固な基盤を提供します。完全な実行可能なコードについては、元の記事を参照してください。
以上がPytorchを使用して、Yolov11モデルの構築に関するガイドの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7915
7915
 15
1652
14
1411
52
1303
25
1248
29
15
1652
14
1411
52
1303
25
1248
29

 クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
この記事では、トップAIアートジェネレーターをレビューし、その機能、創造的なプロジェクトへの適合性、価値について説明します。 Midjourneyを専門家にとって最高の価値として強調し、高品質でカスタマイズ可能なアートにDall-E 2を推奨しています。
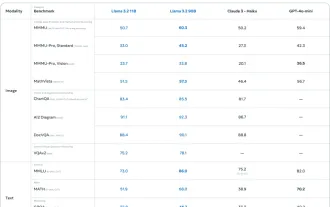
 Meta Llama 3.2を始めましょう - 分析Vidhya
Apr 11, 2025 pm 12:04 PM
Meta Llama 3.2を始めましょう - 分析Vidhya
Apr 11, 2025 pm 12:04 PM
メタのラマ3.2:マルチモーダルとモバイルAIの前進 メタは最近、ラマ3.2を発表しました。これは、モバイルデバイス向けに最適化された強力なビジョン機能と軽量テキストモデルを特徴とするAIの大幅な進歩です。 成功に基づいてo
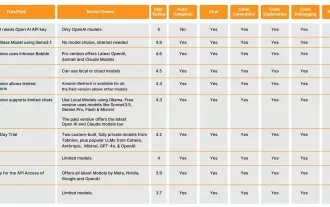
 ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
この記事では、ChatGpt、Gemini、ClaudeなどのトップAIチャットボットを比較し、自然言語の処理と信頼性における独自の機能、カスタマイズオプション、パフォーマンスに焦点を当てています。
 10生成AIコーディング拡張機能とコードのコードを探る必要があります
Apr 13, 2025 am 01:14 AM
10生成AIコーディング拡張機能とコードのコードを探る必要があります
Apr 13, 2025 am 01:14 AM
ねえ、忍者をコーディング!その日はどのようなコーディング関連のタスクを計画していますか?このブログにさらに飛び込む前に、コーディング関連のすべての問題について考えてほしいです。 終わり? - &#8217を見てみましょう
 トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
この記事では、Grammarly、Jasper、Copy.ai、Writesonic、RytrなどのトップAIライティングアシスタントについて説明し、コンテンツ作成のためのユニークな機能に焦点を当てています。 JasperがSEOの最適化に優れているのに対し、AIツールはトーンの維持に役立つと主張します
 従業員へのAI戦略の販売:Shopify CEOのマニフェスト
Apr 10, 2025 am 11:19 AM
従業員へのAI戦略の販売:Shopify CEOのマニフェスト
Apr 10, 2025 am 11:19 AM
Shopify CEOのTobiLütkeの最近のメモは、AIの能力がすべての従業員にとって基本的な期待であると大胆に宣言し、会社内の重大な文化的変化を示しています。 これはつかの間の傾向ではありません。これは、pに統合された新しい運用パラダイムです
 AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5など
Apr 11, 2025 pm 12:01 PM
AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5など
Apr 11, 2025 pm 12:01 PM
今週のAIの風景:進歩、倫理的考慮、規制の議論の旋風。 Openai、Google、Meta、Microsoftのような主要なプレーヤーは、画期的な新しいモデルからLEの重要な変化まで、アップデートの急流を解き放ちました
 最高のAI音声ジェネレーターの選択:レビューされたトップオプション
Apr 02, 2025 pm 06:12 PM
最高のAI音声ジェネレーターの選択:レビューされたトップオプション
Apr 02, 2025 pm 06:12 PM
この記事では、Google Cloud、Amazon Polly、Microsoft Azure、IBM Watson、DecriptなどのトップAI音声ジェネレーターをレビューし、機能、音声品質、さまざまなニーズへの適合性に焦点を当てています。
