

Yolov11オブジェクト検出の包括的なガイド

Yolov11:最新のリアルタイムオブジェクト検出モデルに深く潜ります
ビデオおよび画像分析の急速に進化する分野では、正確で高速でスケーラブルな検出可能なモデルが重要です。アプリケーションは、産業用自動化から自動運転車や高度な画像処理までの範囲です。ヨロ(あなたが一度だけ見る)ファミリのモデルは、達成可能なものの境界を一貫して押し上げ、速度と精度のバランスをとっています。最近リリースされたYolov11は、その系統の中でトップパフォーマーとして際立っています。
この記事では、Yolov11の詳細なアーキテクチャの概要を説明し、その機能を説明し、実用的な実装の例を提供します。この分析は、進行中の研究に由来し、より広いコミュニティに利益をもたらすために共有されています。
主要な学習目標:
- リアルタイムオブジェクト検出におけるヨロの進化と重要性を把握します。
- 機能抽出を強化するために、C3K2やSPFFを含むYolov11の高度なアーキテクチャを理解してください。
- C2PSAなどの注意メカニズムが、小さなオブジェクトの検出と空間的焦点をどのように改善するかを学びます。
- Yolov11のパフォーマンスメトリックを以前のYoloバージョンと比較してください。
- サンプルの実装を通じてYolov11で実践的なエクスペリエンスを獲得します。
(この記事はデータサイエンスブログソンの一部です。)
目次:
- ヨロとは何ですか?
- ヨロの進化の旅(v1からv11)
- Yolov11アーキテクチャ
- Yolov11コードの実装
- Yolov11パフォーマンスメトリック
- Yolov11パフォーマンスの比較
- 結論
- よくある質問
ヨロとは何ですか?
コアコンピュータービジョンタスクであるオブジェクト検出には、画像内のオブジェクトを識別して正確に検索します。 R-CNNのような従来の方法は、計算的に高価です。 Yoloは、精度を損なうことなく、シングルショットでより高速なアプローチを導入することでこれに革命をもたらしました。
ヨロの起源:あなたは一度だけ見ています
ジョセフ・レッドモン等。 CVPRペーパーでYoloを導入しました。目標は、大幅に高速なシングルパス検出アルゴリズムでした。問題を回帰タスクとしてフレーム化し、フィードフォワードニューラルネットワーク(FNN)を通過する単一のフォワードパスから境界ボックス座標とクラスラベルを直接予測します。
ヨロの進化のマイルストーン(v1からv11)
Yoloは継続的な改良を受け、各反復が速度、精度、効率を向上させました。

- Yolov1(2016):オリジナルの優先順位付け速度ですが、小さなオブジェクトの検出に苦労しました。
- Yolov2(2017):改善には、バッチ正規化、アンカーボックス、および高解像度入力が含まれていました。
- Yolov3(2018):特徴ピラミッドを使用したマルチスケール予測を導入しました。
- Yolov4(2020):データ増強技術とバックボーンネットワークの最適化に焦点を当てています。
- Yolov5(2020):正式な研究論文がないにもかかわらず、Pytorchの実装により広く採用されています。
- Yolov6、Yolov7(2022):エッジデバイス用の効率的なバージョンを含む、モデルのスケーリングと精度の強化。
- Yolov8: CSPDARKNETバックボーンやパス集約などのアーキテクチャの変更を導入しました。
- Yolov11: C3K2ブロック、SPFF、およびC2PSAの注意メカニズムを備えた最新のイテレーション。
Yolov11アーキテクチャ
Yolov11のアーキテクチャは、以前のバージョンに基づいて速度と精度の両方を優先しています。主要なアーキテクチャの革新には、C3K2ブロック、SPFFモジュール、C2PSAブロックが含まれます。これらはすべて、高速推論を維持しながら空間情報処理を強化するように設計されています。

(バックボーン、畳み込みブロック、ボトルネック、C2F、C3K、C3K2、ネック、SPFF、注意メカニズム、C2PSAブロック、およびヘッドの詳細な説明はここに続き、元のテキストの構造と内容を反映していますが、真の言い換えを達成するためにわずかな言い換えと言い換えです。
Yolov11コード実装(Pytorchを使用)
(このセクションには、オリジナルと同様のコードスニペットと説明が含まれますが、明確さとフローのためのマイナーな調整があります。)
Yolov11パフォーマンスメトリック
(このセクションでは、平均平均精度(MAP)、組合の交差点(IOU)、および秒あたりのフレーム(FPS)をマイナーな言い換えで説明します。)
Yolov11パフォーマンスの比較
(このセクションには、オリジナルと同様の比較テーブルが含まれており、Yolov11を以前のバージョンと比較して、わずかなrephrasingと比較します。)
結論
Yolov11は、オブジェクトの検出における重要な前進を表し、速度と精度を効果的にバランスさせます。 C3K2やC2PSAなどの革新的な建築コンポーネントは、さまざまなアプリケーションで優れたパフォーマンスに貢献しています。
(結論は、オリジナルと同様ですが、ある程度の言い換えがある重要な調査結果と意味を要約します。)
よくある質問
(このセクションはQ&A形式を保持し、より良い流れと明確さのために質問と回答を言い換えます。)
(注:画像URLは変更されていません。)
以上がYolov11オブジェクト検出の包括的なガイドの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7821
7821
 15
1647
14
1402
52
1300
25
1238
29
15
1647
14
1402
52
1300
25
1238
29

 クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
この記事では、トップAIアートジェネレーターをレビューし、その機能、創造的なプロジェクトへの適合性、価値について説明します。 Midjourneyを専門家にとって最高の価値として強調し、高品質でカスタマイズ可能なアートにDall-E 2を推奨しています。
 Meta Llama 3.2を始めましょう - 分析Vidhya
Apr 11, 2025 pm 12:04 PM
Meta Llama 3.2を始めましょう - 分析Vidhya
Apr 11, 2025 pm 12:04 PM
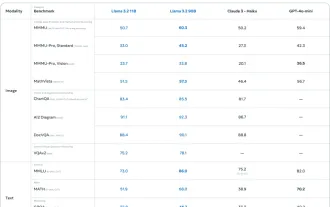
メタのラマ3.2:マルチモーダルとモバイルAIの前進 メタは最近、ラマ3.2を発表しました。これは、モバイルデバイス向けに最適化された強力なビジョン機能と軽量テキストモデルを特徴とするAIの大幅な進歩です。 成功に基づいてo
 ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
この記事では、ChatGpt、Gemini、ClaudeなどのトップAIチャットボットを比較し、自然言語の処理と信頼性における独自の機能、カスタマイズオプション、パフォーマンスに焦点を当てています。
 トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
この記事では、Grammarly、Jasper、Copy.ai、Writesonic、RytrなどのトップAIライティングアシスタントについて説明し、コンテンツ作成のためのユニークな機能に焦点を当てています。 JasperがSEOの最適化に優れているのに対し、AIツールはトーンの維持に役立つと主張します
 従業員へのAI戦略の販売:Shopify CEOのマニフェスト
Apr 10, 2025 am 11:19 AM
従業員へのAI戦略の販売:Shopify CEOのマニフェスト
Apr 10, 2025 am 11:19 AM
Shopify CEOのTobiLütkeの最近のメモは、AIの能力がすべての従業員にとって基本的な期待であると大胆に宣言し、会社内の重大な文化的変化を示しています。 これはつかの間の傾向ではありません。これは、pに統合された新しい運用パラダイムです
 AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5など
Apr 11, 2025 pm 12:01 PM
AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5など
Apr 11, 2025 pm 12:01 PM
今週のAIの風景:進歩、倫理的考慮、規制の議論の旋風。 Openai、Google、Meta、Microsoftのような主要なプレーヤーは、画期的な新しいモデルからLEの重要な変化まで、アップデートの急流を解き放ちました
 AIエージェントを構築するためのトップ7エージェントRAGシステム
Mar 31, 2025 pm 04:25 PM
AIエージェントを構築するためのトップ7エージェントRAGシステム
Mar 31, 2025 pm 04:25 PM
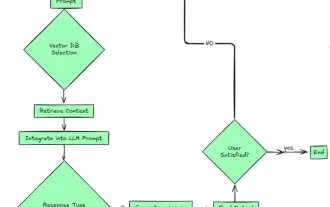
2024年は、コンテンツ生成にLLMSを使用することから、内部の仕組みを理解することへの移行を目撃しました。 この調査は、AIエージェントの発見につながりました。これは、最小限の人間の介入でタスクと決定を処理する自律システムを処理しました。 buildin
 最高のAI音声ジェネレーターの選択:レビューされたトップオプション
Apr 02, 2025 pm 06:12 PM
最高のAI音声ジェネレーターの選択:レビューされたトップオプション
Apr 02, 2025 pm 06:12 PM
この記事では、Google Cloud、Amazon Polly、Microsoft Azure、IBM Watson、DecriptなどのトップAI音声ジェネレーターをレビューし、機能、音声品質、さまざまなニーズへの適合性に焦点を当てています。
