

Rocketpyを使用したロケットの起動シミュレーションと分析-AnalyticsVidhya

Rocketpy:A包括的なガイドでロケット発売をシミュレートします
この記事では、強力なPythonライブラリであるRocketpyを使用して、高出力ロケット発売をシミュレートすることをガイドします。ロケットコンポーネントの定義からシミュレーション結果の分析とデータの視覚化まで、すべてをカバーします。学生であろうとベテランのエンジニアであろうと、このチュートリアルは実用的で実践的な体験を提供します。
学習目標:
- ロケット発射シミュレーション用のマスターロケット。
- ロケットコンポーネント(モーター、ボディ、フィン、パラシュート)を構成します。
- 飛行シミュレーションを実行および解釈します。
- Matplotlibを使用してデータを視覚化し、フーリエ分析を実行します。
- 一般的なシミュレーションの問題をトラブルシューティングします。
(この記事はデータサイエンスブログソンの一部です。)
目次:
- 導入
- Rocketpyとは何ですか?
- 必要なデータのダウンロード
- ライブラリと環境のセットアップのインポート
- 固体運動仕様の理解
- ロケットの寸法と部品の構成
- パラシュートの追加と構成
- シミュレーションの実行と分析
- 軌道をKMLにエクスポートします
- データ分析と視覚化
- 結論
- よくある質問
Rocketpyとは何ですか?
Rocketpyは、高出力ロケットフライトをシミュレートして分析するためのPythonライブラリです。ロケットコンポーネント(ソリッドモーター、フィン、パラシュート)をモデル化し、打ち上げと飛行中の動作をシミュレートします。ユーザーは、ロケットパラメーターを定義し、シミュレーションを実行し、プロットとデータエクスポートを介して結果を視覚化します。
必要なデータのダウンロード:
シミュレーションのためにこれらのファイルをダウンロードしてください。
!ピップインストールRocketpy !curl -o naca0012-radians.csv https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/calisto/naca0012-radians.csv !curl -o cesaroni_m1670.eng https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/motors/cesaroni_m1670.eng !curl -o PowerOffDragcurve.csv https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/calisto/poweroffdragcurve.csv !curl -o powerondragcurve.csv https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/calisto/powerondragcurve.csv
ライブラリのインポートと環境のセットアップ:
必要なライブラリをインポートし、場所と大気条件を定義します。
ロケットの輸入環境、ソリッドモーター、ロケット、飛行から Import DateTime #環境を初期化します env =環境(緯度= 32.990254、経度= -106.974998、標高= 1400) 明日= datetime.date.today()datetime.timedelta(days = 1) env.set_date((明日、year、明日、明日、日、12))) env.set_atmospheric_model(type = "forecast"、file = "gfs") env.info()

Environmentクラスは、正確なシミュレーションのために地理的位置と大気条件を設定します。
固体モーターの特性を理解する:
モーターパラメーター(スラスト、寸法、プロパティ)を定義します。
pro75m1670 = solidmotor(
thrust_source = "cesaroni_m1670.eng"、
dry_mass = 1.815、
dry_inertia =(0.125、0.125、0.002)、
nozzle_radius = 33/1000、
grain_number = 5、
grain_dences = 1815、
grain_outer_radius = 33/1000、
grain_initial_inner_radius = 15/1000、
grain_initial_height = 120 /1000、
grain_separation = 5/1000、
grains_center_of_mass_position = 0.397、
center_of_dry_mass_position = 0.317、
nozzle_position = 0、
burn_time = 3.9、
throat_radius = 11/1000、
coordinate_system_orientation = "nozzle_to_combustion_chamber"、
))
pro75m1670.info() 
SolidMotorクラスは、モーターの物理的および性能特性を定義します。
ロケットの寸法とコンポーネントの構成:
ロケットパラメーター(寸法、コンポーネント、モーター統合)を定義します。
Calisto = Rocket(
radius = 127/2000、
質量= 14.426、
inertia =(6.321、6.321、0.034)、
Power_off_drag = "PowerOffdragcurve.csv"、
Power_on_drag = "PowerOndRagcurve.csv"、
center_of_mass_without_motor = 0、
coordinate_system_orientation = "tail_to_nose"、
))
calisto.set_rail_buttons(apper_button_position = 0.0818、lower_button_position = -0.618、angular_position = 45)
calisto.add_motor(pro75m1670、position = -1.255)
calisto.add_nose(length = 0.55829、kind = "vonkarman"、position = 1.278)
calisto.add_trapezoidal_fins(n = 4、root_chord = 0.120、tip_chord = 0.060、span = 0.110、position = -1.04956、cant_angle = 0.5、airfoil =( "naca0012-radians.csv"、 "radians")))
calisto.add_tail(top_radius = 0.0635、bottom_radius = 0.0435、length = 0.060、position = -1.194656)
calisto.all_info() 
Rocketクラスは、ロケットの構造(フィン、ノーズコーン)を定義し、安定性と空力に影響を与えます。マスプロットが続きます。




パラシュートの追加と構成:
安全な回復のためにパラシュートを追加します:
main = calisto.add_parachute(
"主要"、
CD_S = 10.0、
トリガー= 800、
sampling_rate = 105、
ラグ= 1.5、
ノイズ=(0、8.3、0.5)、
))
DROGUE = calisto.add_parachute(
「ドローグ」、
CD_S = 1.0、
trigger = "apogee"、
sampling_rate = 105、
ラグ= 1.5、
ノイズ=(0、8.3、0.5)、
)) 


パラシュートは、制御された降下に不可欠です。ドラッグ係数や展開高度などのパラメーターが重要です。
シミュレーションの実行と分析:
フライトシミュレーションを実行します:
test_flight = flight(
Rocket = Calisto、Environment = Env、Rail_Length = 5.2、傾斜= 85、見出し= 0
))
test_flight.all_info() 
Flightクラスは軌道をシミュレートします。
軌道をKMLにエクスポートする:
Google Earthでの視覚化の軌跡をエクスポートします:
test_flight.export_kml(file_name = "trajectory.kml"、extrude = true、altitude_mode = "relative_to_ground")
データ分析と視覚化:
分析を実行し、結果を視覚化します(質量、リフトオフ速度、フーリエ分析によるアポギー):
Rocketpy.utilitiesからインポートapogee_by_mass、liftoff_speed_by_massから npとしてnumpyをインポートします pltとしてmatplotlib.pyplotをインポートします #...(プロットとフーリエ分析のためのコード)...

視覚化は、ロケットのパフォーマンスとダイナミクスを理解するのに役立ちます。
結論:
Rocketpyは、ロケットフライトシミュレーションと分析のための強力なフレームワークを提供します。このチュートリアルは、完全なウォークスルーを提供し、ユーザーがシミュレーションを実行し、結果を分析し、データを効果的に視覚化できるようにします。
重要なテイクアウト:
- 包括的なロケットシミュレーションプロセス。
- 実践的なPythonコードの例。
- 正確なシミュレーションのためのコンポーネント構成の重要性。
- 飛行ダイナミクスをよりよく理解するためのデータ視覚化。
- トラブルシューティングのヒントとリソース。
よくある質問:
- Q1:Rocketpyとは何ですか? A:高出力ロケットフライトをシミュレートおよび分析するためのPythonライブラリ。
- Q2:Rocketpyのインストール方法は? A:
pip install rocketpyを使用します。 - Q3:エラーが発生した場合はどうすればよいですか? A:パラメーター、データファイル、およびパスを確認します。トラブルシューティングリソースを参照してください。
- Q4:結果を視覚化する方法は? A:Google EarthのKMLにエクスポートし、カスタムプロットにMatplotlibを使用します。
(注:画像はこの応答によって所有されておらず、入力に提供されているように使用されます。)
以上がRocketpyを使用したロケットの起動シミュレーションと分析-AnalyticsVidhyaの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7767
7767
 15
1644
14
1399
52
1293
25
1234
29
15
1644
14
1399
52
1293
25
1234
29

 クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
この記事では、トップAIアートジェネレーターをレビューし、その機能、創造的なプロジェクトへの適合性、価値について説明します。 Midjourneyを専門家にとって最高の価値として強調し、高品質でカスタマイズ可能なアートにDall-E 2を推奨しています。
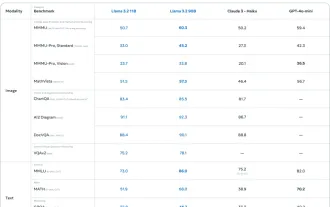
 Meta Llama 3.2を始めましょう - 分析Vidhya
Apr 11, 2025 pm 12:04 PM
Meta Llama 3.2を始めましょう - 分析Vidhya
Apr 11, 2025 pm 12:04 PM
メタのラマ3.2:マルチモーダルとモバイルAIの前進 メタは最近、ラマ3.2を発表しました。これは、モバイルデバイス向けに最適化された強力なビジョン機能と軽量テキストモデルを特徴とするAIの大幅な進歩です。 成功に基づいてo
 ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
この記事では、ChatGpt、Gemini、ClaudeなどのトップAIチャットボットを比較し、自然言語の処理と信頼性における独自の機能、カスタマイズオプション、パフォーマンスに焦点を当てています。
 ChatGpt 4 oは利用できますか?
Mar 28, 2025 pm 05:29 PM
ChatGpt 4 oは利用できますか?
Mar 28, 2025 pm 05:29 PM
CHATGPT 4は現在利用可能で広く使用されており、CHATGPT 3.5のような前任者と比較して、コンテキストを理解し、一貫した応答を生成することに大幅な改善を示しています。将来の開発には、よりパーソナライズされたインターが含まれる場合があります
 トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
この記事では、Grammarly、Jasper、Copy.ai、Writesonic、RytrなどのトップAIライティングアシスタントについて説明し、コンテンツ作成のためのユニークな機能に焦点を当てています。 JasperがSEOの最適化に優れているのに対し、AIツールはトーンの維持に役立つと主張します
 AIエージェントを構築するためのトップ7エージェントRAGシステム
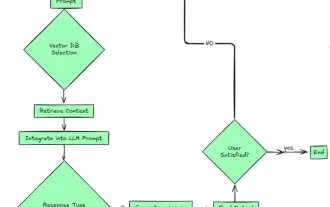
Mar 31, 2025 pm 04:25 PM
AIエージェントを構築するためのトップ7エージェントRAGシステム
Mar 31, 2025 pm 04:25 PM
2024年は、コンテンツ生成にLLMSを使用することから、内部の仕組みを理解することへの移行を目撃しました。 この調査は、AIエージェントの発見につながりました。これは、最小限の人間の介入でタスクと決定を処理する自律システムを処理しました。 buildin
 最高のAI音声ジェネレーターの選択:レビューされたトップオプション
Apr 02, 2025 pm 06:12 PM
最高のAI音声ジェネレーターの選択:レビューされたトップオプション
Apr 02, 2025 pm 06:12 PM
この記事では、Google Cloud、Amazon Polly、Microsoft Azure、IBM Watson、DecriptなどのトップAI音声ジェネレーターをレビューし、機能、音声品質、さまざまなニーズへの適合性に焦点を当てています。
 AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5など
Apr 11, 2025 pm 12:01 PM
AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5など
Apr 11, 2025 pm 12:01 PM
今週のAIの風景:進歩、倫理的考慮、規制の議論の旋風。 Openai、Google、Meta、Microsoftのような主要なプレーヤーは、画期的な新しいモデルからLEの重要な変化まで、アップデートの急流を解き放ちました
