

Docker データ ボリュームの上級章
Docker は、開発者がアプリケーションと依存関係をポータブル コンテナにパッケージ化し、それを仮想化も可能な一般的な Linux マシンに公開できるオープン ソース アプリケーション コンテナ エンジンです。 この記事では主にdockerのデータ量の上級版を紹介しますので、皆さんのお役に立てれば幸いです。
なぜデータ量が必要なのですか?
これは、Docker コンテナーのファイル システムから開始する必要があります。効率性などの理由から、Dockerコンテナのファイルシステムはホストマシン上に複雑に存在しており、次のような問題が発生します:
コンテナ内のファイルにホスト上で簡単にアクセスできない機械。
複数のコンテナ間でデータを共有することはできません。
コンテナを削除すると、コンテナ内で生成されたデータは失われます。
これらの問題を解決するために、docker はデータボリューム (ボリューム) メカニズムを導入しました。データ ボリュームは、1 つ以上のコンテナー内に存在する特定のファイルまたはフォルダーであり、このファイルまたはフォルダーは、Docker ファイル システムとは独立してホスト マシン上に存在します。データ ボリュームの最大の特徴は、そのライフ サイクルがコンテナのライフ サイクルから独立していることです。
データ ボリュームを使用するための最良のシナリオ
複数のコンテナー間でデータを共有する。複数のコンテナーが同じデータ ボリュームを読み取り専用または読み取り/書き込みモードで同時にマウントできるため、データ ボリューム内のデータを共有できます。
固定パスを持つ特定のディレクトリまたはファイルが存在する必要があることをホストが保証できない場合、データ ボリュームを使用すると、この制限によって引き起こされる問題を回避できます。
リモートホストやクラウドストレージなど、ホスト以外の場所にコンテナにデータを保存したい場合。
異なるホスト間でコンテナー データをバックアップ、復元、または移行する必要がある場合は、データ ボリュームが適しています。
docker volume サブコマンド
docker は、データ ボリュームを操作するための volume サブコマンドを具体的に提供します。
create データ ボリュームを作成する
inspect データ ボリュームの詳細情報を表示する
ls すべてのデータ ボリュームをリストする
prune は未使用のデータをすべて削除するボリューム 使用済みのボリュームで、-f オプションが付いています
rm 1 つ以上の未使用のボリュームを削除し、-f オプションが付いています
まず、hello という名前のデータ ボリュームを作成し、ls コマンドで表示します。
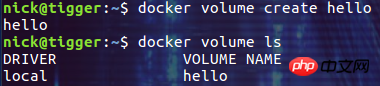
次に、 Inspection コマンドを使用して、データ ボリュームの詳細情報を確認できます。こんにちは:
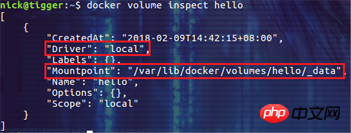
ここでは、データ ボリュームが作成された時刻がわかります。これは、データ ボリュームで使用されるドライバーがデフォルトの「ローカル」であることを意味します。データ ボリュームがホストを使用すること。ホストのローカル ストレージ。データ ボリュームのマウント ポイント。デフォルトではローカル マシンの /var/lib/docker/volumes の下のディレクトリです。
最後に、rm または prune コマンドを使用してデータ ボリュームを削除できます。後で、実際の使用におけるデータ ボリュームの削除に関するいくつかの実践方法を紹介します。
マウント構文を使用してデータ ボリュームをマウントする
--volume(-v) オプションを使用してデータ ボリュームをマウントする前は、docker はデータ ボリュームを管理するためのより強力な --mount オプションを提供します。マウント オプションでは、カンマで区切られた複数のキーと値のペアを通じて複数の構成アイテムを一度に提供できるため、マウント オプションはボリューム オプションよりも詳細な構成を提供できます。 mount オプションを使用して一般的に使用される
構成は次のとおりです。
type はマウント方法を指定します。実際には、bind と tmpfs も使用できます。
volume-driver は、データ ボリュームをマウントするドライバーを指定します。デフォルト値はローカルです。
source はマウントのソースを指定します。名前付きデータ ボリュームの場合は、データ ボリュームの名前をここで指定する必要があります。使用する場合は、source と書くことも、src と省略することもできます。
destination は、コンテナー内にマウントされたデータのパスを指定します。使用する場合はdestinationと書いたり、dstやtargetと略したりすることもできます。
readonly は、マウントされたデータが読み取り専用であることを指定します。
volume-opt を複数回指定して、マウント関連の構成をさらに改善することができます。
以下の具体的な例を見てみましょう:
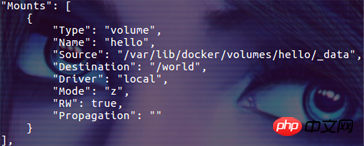
$ docker volume create hello $ docker run -id --mount type=volume,source=hello,target=/world ubuntu /bin/bash
hello という名前のデータ ボリュームを作成し、それをコンテナーの /world ディレクトリにマウントしました。実際のデータ ボリュームのマウント結果は、inspect コマンドを使用してコンテナの詳細で「マウント」情報を表示することで確認できます:
ボリューム ドライバーを使用してデータを他の場所に保存します
デフォルト データに加えてデータ ボリュームにホスト上に保存される Docker では、ボリューム ドライバーを指定することで、Azure Storge や AWS S3 などの他の場所にあるデータ ボリュームにデータを保存することもできます。
简单起见,我们接下来的 demo 演示如何通过 vieux/sshfs 驱动把数据卷的存储在其它的主机上。
docker 默认是不安装 vieux/sshfs 插件的,我们可以通过下面的命令进行安装:
$ docker plugin install --grant-all-permissions vieux/sshfs
然后通过 vieux/sshfs 驱动创建数据卷,并指定远程主机的登录用户名、密码和数据存放目录:
docker volume create --driver vieux/sshfs \ -o sshcmd=nick@10.32.2.134:/home/nick/sshvolume \ -o password=yourpassword \ mysshvolume
注意,请确保你指定的远程主机上的挂载点目录是存在的(demo 中是 /home/nick/sshvolume 目录),否则在启动容器时会报错。
最后在启动容器时指定挂载这个数据卷:
docker run -id \ --name testcon \ --mount type=volume,volume-driver=vieux/sshfs,source=mysshvolume,target=/world \ ubuntu /bin/bash
这就搞定了,你在容器中 /world 目录下操作的文件都存储在远程主机的 /home/nick/sshvolume 目录中。进入容器 testcon 然后在 /world 目录中创建一个文件,然后打开远程主机的 /home/nick/sshvolume 目录进行查看,你新建的文件是不是已经出现在那里了!
数据卷原理
下图描述了 docker 容器挂载数据的三种方式: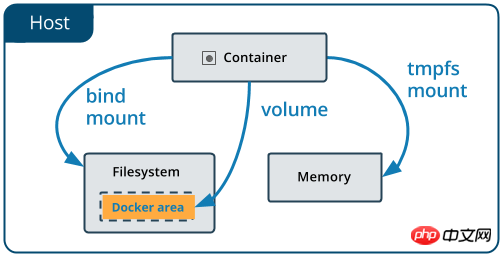
数据卷是完全被 docker 管理的,就像上图中的黄色区域描述的一样,docker 在宿主机的文件系统中找了个文件管理数据卷相关的数据。因此你可能根本不需要知道数据卷文件在宿主机上的存储位置(事实上抱着刨根问底的精神我们还是很想搞清楚它背后的工作原理!)。
docker 数据卷的本质是容器中的一个特殊目录。在容器创建的过程中,docker 会将宿主机上的指定目录(一个以数据卷 ID 为名称的目录)挂载到容器中指定的目录上。这里使用的挂载方式为绑定挂载(bind mount),所以挂载完成后的宿主机目录和容器内的目标目录表现一致。
比如我们执行下面的命令创建数据卷 hello,并挂载到容器 testcon 的 /world 目录:
$ docker volume create hello $ docker run -id --name testcon --mount type=volume,source=hello,target=/world ubuntu /bin/bash
实际上在容器的创建过程中,类似于在容器中执行了下面的代码:
// 将数据卷 hello 在宿主机上的目录绑定挂载到 rootfs 中指定的挂载点 /world 上
mount("/var/lib/docker/volumes/hello/_data", "rootfs/world", "none", MS_BIND, NULL)在处理完所有的 mount 操作之后(真正需要 docker 容器挂载的除了数据卷目录还包括 rootfs,init-layer 里的内容,/proc 设备等),docker 只需要通过 chdir 和 pivot_root 切换进程的根目录到 rootfs 中,这样容器内部进程就只能看见以 rootfs 为根的文件系统以及被 mount 到 rootfs 之下的各项目录了。例如我们启动的 testcon 中的文件系统为:

下面我们介绍几个数据卷在使用中比较常见的问题。
数据的覆盖问题
如果挂载一个空的数据卷到容器中的一个非空目录中,那么这个目录下的文件会被复制到数据卷中。
如果挂载一个非空的数据卷到容器中的一个目录中,那么容器中的目录中会显示数据卷中的数据。如果原来容器中的目录中有数据,那么这些原始数据会被隐藏掉。
这两个规则都非常重要,灵活利用第一个规则可以帮助我们初始化数据卷中的内容。掌握第二个规则可以保证挂载数据卷后的数据总是你期望的结果。
在 Dockerfile 中添加数据卷
在 Dockerfile 中我们可以使用 VOLUME 指令向容器添加数据卷:
VOLUME /data
在使用 docker build 命令生成镜像并且以该镜像启动容器时会挂载一个数据卷到 /data 目录。根据我们已知的数据覆盖规则,如果镜像中存在 /data 目录,这个目录中的内容将全部被复制到宿主机中对应的目录中,并且根据容器中的文件设置合适的权限和所有者。
注意,VOLUME 指令不能挂载主机中指定的目录。这是为了保证 Dockerfile 的可一致性,因为不能保证所有的宿主机都有对应的目录。
在实际的使用中,这里还有一个陷阱需要大家注意:在 Dockerfile 中使用 VOLUME 指令之后的代码,如果尝试对这个数据卷进行修改,这些修改都不会生效!下面是一个这样的例子:
FROM ubuntu RUN useradd nick VOLUME /data RUN touch /data/test.txt RUN chown -R nick:nick /data
通过这个 Dockerfile 创建镜像并启动容器后,该容器中存在用户 nick,并且能够看到 /data 目录挂载的数据卷。但是 /data 目录内并没有文件 test.txt,更别说 test.txt 文件的所有者属性了。要解释这个现象需要我们了解通过 Dockerfile 创建镜像的过程:
Dockerfile 中除了 FROM 指令的每一行都是基于上一行生成的临时镜像运行一个容器,执行一条指令并执行类似 docker commit 的命令得到一个新的镜像。这条类似 docker commit 的命令不会对挂载的数据卷进行保存。
所以上面的 Dockerfile 最后两行执行时,都会在一个临时的容器上挂载 /data,并对这个临时的数据卷进行操作,但是这一行指令执行并提交后,这个临时的数据卷并没有被保存。因而我们最终通过镜像创建的容器所挂载的数据卷是没有被最后两条指令操作过的。我们姑且叫它 "Dockerfile 中数据卷的初始化问题"。
下面的写法可以解决 Dockerfile 中数据卷的初始化问题:
FROM ubuntu RUN useradd nick RUN mkdir /data && touch /data/test.txt RUN chown -R nick:nick /data VOLUME /data
通过这个 Dockerfile 创建镜像并启动容器后,数据卷的初始化是符合预期的。这是由于在挂载数据卷时,/data 已经存在,/data 中的文件以及它们的权限和所有者设置会被复制到数据卷中。
还有另外一种方法可以解决 Dockerfile 中数据卷的初始化问题。就是利用 CMD 指令和 ENTRYPOINT 指令的执行特点:与 RUN 指令在镜像构建过程中执行不同,CMD 指令和 ENTRYPOINT 指令是在容器启动时执行。因此使用下面的 Dockerfile 也可以达到对数据卷的初始化目的:
FROM ubuntu RUN useradd nick VOLUME /data CMD touch /data/test.txt && chown -R nick:nick /data && /bin/bash
总结
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家支持php中文网。
相关推荐:
以上がDocker データ ボリュームの上級章の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7322
7322
 9
1625
14
1349
46
1261
25
1209
29
9
1625
14
1349
46
1261
25
1209
29

 超知性の生命力が覚醒する!しかし、自己更新 AI の登場により、母親はデータのボトルネックを心配する必要がなくなりました。
Apr 29, 2024 pm 06:55 PM
超知性の生命力が覚醒する!しかし、自己更新 AI の登場により、母親はデータのボトルネックを心配する必要がなくなりました。
Apr 29, 2024 pm 06:55 PM
世界は狂ったように大きなモデルを構築していますが、インターネット上のデータだけではまったく不十分です。このトレーニング モデルは「ハンガー ゲーム」のようであり、世界中の AI 研究者は、データを貪欲に食べる人たちにどのように餌を与えるかを心配しています。この問題は、マルチモーダル タスクで特に顕著です。何もできなかった当時、中国人民大学学部のスタートアップチームは、独自の新しいモデルを使用して、中国で初めて「モデル生成データフィード自体」を実現しました。さらに、これは理解側と生成側の 2 つの側面からのアプローチであり、両方の側で高品質のマルチモーダルな新しいデータを生成し、モデル自体にデータのフィードバックを提供できます。モデルとは何ですか? Awaker 1.0 は、中関村フォーラムに登場したばかりの大型マルチモーダル モデルです。チームは誰ですか?ソフォンエンジン。人民大学ヒルハウス人工知能大学院の博士課程学生、ガオ・イージャオ氏によって設立されました。
 iPhoneのセルラーデータインターネット速度が遅い:修正
May 03, 2024 pm 09:01 PM
iPhoneのセルラーデータインターネット速度が遅い:修正
May 03, 2024 pm 09:01 PM
iPhone のモバイル データ接続に遅延や遅い問題が発生していませんか?通常、携帯電話の携帯インターネットの強度は、地域、携帯ネットワークの種類、ローミングの種類などのいくつかの要因によって異なります。より高速で信頼性の高いセルラー インターネット接続を実現するためにできることがいくつかあります。解決策 1 – iPhone を強制的に再起動する 場合によっては、デバイスを強制的に再起動すると、携帯電話接続を含む多くの機能がリセットされるだけです。ステップ 1 – 音量を上げるキーを 1 回押して放します。次に、音量小キーを押して、もう一度放します。ステップ 2 – プロセスの次の部分は、右側のボタンを押し続けることです。 iPhone の再起動が完了するまで待ちます。セルラーデータを有効にし、ネットワーク速度を確認します。もう一度確認してください 修正 2 – データ モードを変更する 5G はより優れたネットワーク速度を提供しますが、信号が弱い場合はより適切に機能します
 アメリカ空軍が初のAI戦闘機を公開し注目を集める!大臣はプロセス全体を通じて干渉することなく個人的にテストを実施し、10万行のコードが21回にわたってテストされました。
May 07, 2024 pm 05:00 PM
アメリカ空軍が初のAI戦闘機を公開し注目を集める!大臣はプロセス全体を通じて干渉することなく個人的にテストを実施し、10万行のコードが21回にわたってテストされました。
May 07, 2024 pm 05:00 PM
最近、軍事界は、米軍戦闘機が AI を使用して完全自動空戦を完了できるようになったというニュースに圧倒されました。そう、つい最近、米軍のAI戦闘機が初めて公開され、その謎が明らかになりました。この戦闘機の正式名称は可変安定性飛行シミュレーター試験機(VISTA)で、アメリカ空軍長官が自ら飛行させ、一対一の空戦をシミュレートした。 5 月 2 日、フランク ケンダル米国空軍長官は X-62AVISTA でエドワーズ空軍基地を離陸しました。1 時間の飛行中、すべての飛行動作が AI によって自律的に完了されたことに注目してください。ケンダル氏は「過去数十年にわたり、私たちは自律型空対空戦闘の無限の可能性について考えてきたが、それは常に手の届かないものだと思われてきた」と語った。しかし今では、
 テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボット「オプティマス」の最新映像が公開され、すでに工場内で稼働可能となっている。通常の速度では、バッテリー(テスラの4680バッテリー)を次のように分類します:公式は、20倍の速度でどのように見えるかも公開しました - 小さな「ワークステーション」上で、ピッキング、ピッキング、ピッキング:今回は、それがリリースされたハイライトの1つビデオの内容は、オプティマスが工場内でこの作業を完全に自律的に行い、プロセス全体を通じて人間の介入なしに完了するというものです。そして、オプティマスの観点から見ると、自動エラー修正に重点を置いて、曲がったバッテリーを拾い上げたり配置したりすることもできます。オプティマスのハンドについては、NVIDIA の科学者ジム ファン氏が高く評価しました。オプティマスのハンドは、世界の 5 本指ロボットの 1 つです。最も器用。その手は触覚だけではありません
 Llama 70B を実行するシングル カードはデュアル カードより高速、Microsoft は FP6 を A100 オープンソースに強制導入
Apr 29, 2024 pm 04:55 PM
Llama 70B を実行するシングル カードはデュアル カードより高速、Microsoft は FP6 を A100 オープンソースに強制導入
Apr 29, 2024 pm 04:55 PM
FP8 以下の浮動小数点数値化精度は、もはや H100 の「特許」ではありません。 Lao Huang は誰もが INT8/INT4 を使用できるようにしたいと考え、Microsoft DeepSpeed チームは NVIDIA からの公式サポートなしで A100 上で FP6 の実行を開始しました。テスト結果は、A100 での新しい方式 TC-FPx の FP6 量子化が INT4 に近いか、場合によってはそれよりも高速であり、後者よりも精度が高いことを示しています。これに加えて、エンドツーエンドの大規模モデルのサポートもあり、オープンソース化され、DeepSpeed などの深層学習推論フレームワークに統合されています。この結果は、大規模モデルの高速化にも即座に影響します。このフレームワークでは、シングル カードを使用して Llama を実行すると、スループットはデュアル カードのスループットの 2.65 倍になります。 1つ
 PIノードティーチング:PIノードとは何ですか? PIノードをインストールしてセットアップする方法は?
Mar 05, 2025 pm 05:57 PM
PIノードティーチング:PIノードとは何ですか? PIノードをインストールしてセットアップする方法は?
Mar 05, 2025 pm 05:57 PM
ピン張りのノードの詳細な説明とインストールガイドこの記事では、ピネットワークのエコシステムを詳細に紹介します - PIノードは、ピン系生態系における重要な役割であり、設置と構成の完全な手順を提供します。 Pinetworkブロックチェーンテストネットワークの発売後、PIノードは多くの先駆者の重要な部分になり、テストに積極的に参加し、今後のメインネットワークリリースの準備をしています。まだピン張りのものがわからない場合は、ピコインとは何かを参照してください。リストの価格はいくらですか? PIの使用、マイニング、セキュリティ分析。パインワークとは何ですか?ピン競技プロジェクトは2019年に開始され、独占的な暗号通貨PIコインを所有しています。このプロジェクトは、誰もが参加できるものを作成することを目指しています
 PHPマイクロサービスコンテナ化のアジャイル開発と運用
May 08, 2024 pm 02:21 PM
PHPマイクロサービスコンテナ化のアジャイル開発と運用
May 08, 2024 pm 02:21 PM
回答: PHP マイクロサービスは、アジャイル開発のために HelmCharts でデプロイされ、分離とスケーラビリティのために DockerContainer でコンテナ化されます。詳細説明: HelmCharts を使用して PHP マイクロサービスを自動的にデプロイし、アジャイル開発を実現します。 Docker イメージを使用すると、マイクロサービスの迅速な反復とバージョン管理が可能になります。 DockerContainer 標準はマイクロサービスを分離し、Kubernetes がコンテナの可用性とスケーラビリティを管理します。 Prometheus と Grafana を使用して、マイクロサービスのパフォーマンスと健全性を監視し、アラームと自動修復メカニズムを作成します。
 DeepSeekをインストールする方法
Feb 19, 2025 pm 05:48 PM
DeepSeekをインストールする方法
Feb 19, 2025 pm 05:48 PM
DeepSeekをインストールするには、Dockerコンテナ(最も便利な場合は、互換性について心配する必要はありません)を使用して、事前コンパイルパッケージ(Windowsユーザー向け)を使用してソースからコンパイル(経験豊富な開発者向け)を含む多くの方法があります。公式文書は慎重に文書化され、不必要なトラブルを避けるために完全に準備します。
