

Python はキャリブレーションに OpenCV を使用します

この記事では、主に Python でのキャリブレーションのための OpenCV の使用方法を紹介します。必要な場合は、それを参考にしてください。公式サンプルを用意し、正常に動作できるようにし、自身で収集したデータの実験や解説を行います。
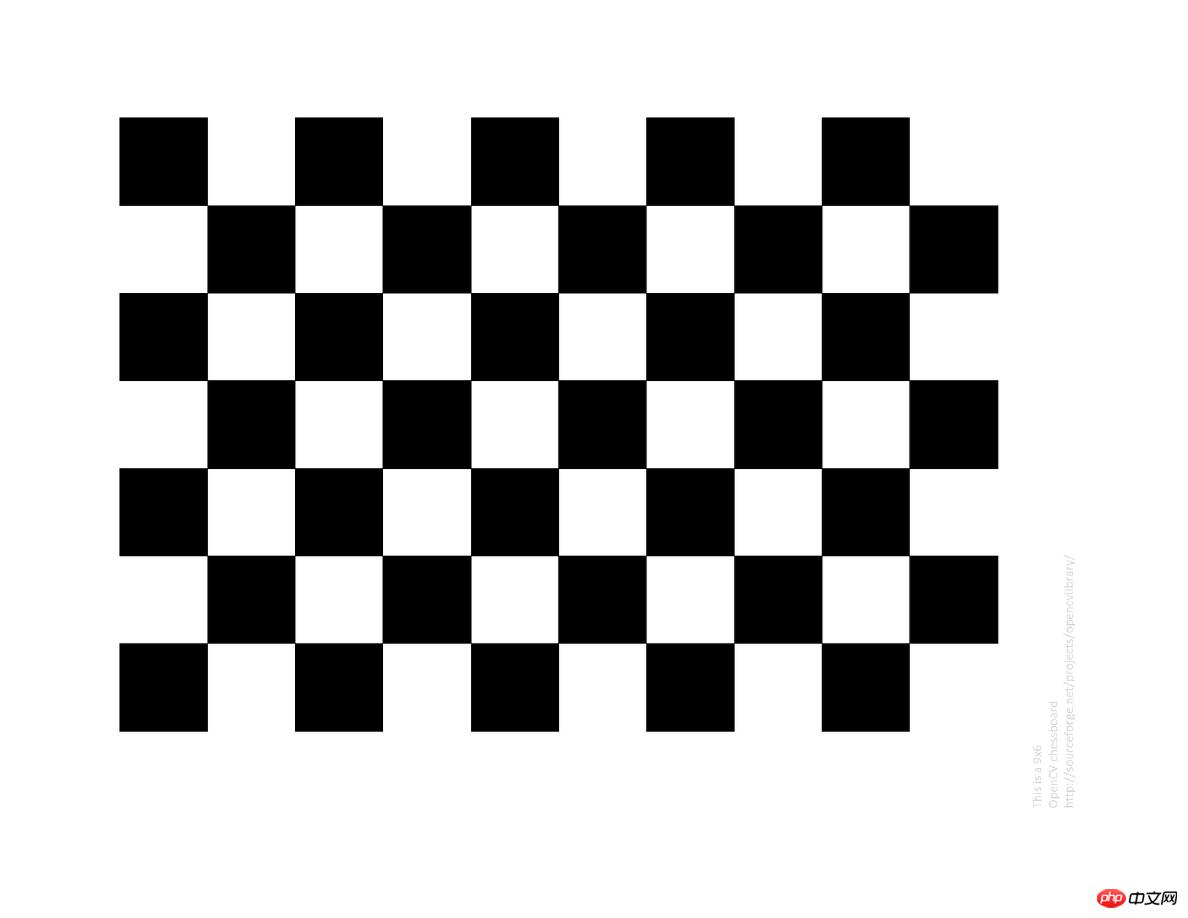
1. 準備 OpenCV は、下の図に示すように、キャリブレーションにチェッカーボードを使用します。カメラをキャリブレーションするには、一連の 3D ポイントとそれに対応する 2D 画像ポイントを入力する必要があります。白黒のチェッカーボードでは、コーナー検出によって 2 次元の画像点を簡単に見つけることができます。現実世界の 3 次元の点はどうなるでしょうか?収集中、カメラを 1 か所に置き、チェッカーボードの校正プレートを別の位置に移動して、写真を撮影しました。したがって、(X,Y,Z) の値を知る必要があります。しかし、簡単に言えば、チェッカーボードが配置されている平面を XY 平面、つまり Z=0 として定義します。キャリブレーション ボードの場合、チェッカーボードの正方形のサイズ (30 mm など) がわかるので、チェッカーボード上のコーナー ポイントの座標を (0,0,0)、(30,0,0)、( 60、 0,0),...、この結果の単位は mm です。
3D 点はオブジェクト点と呼ばれ、2D 画像点は画像点と呼ばれます。
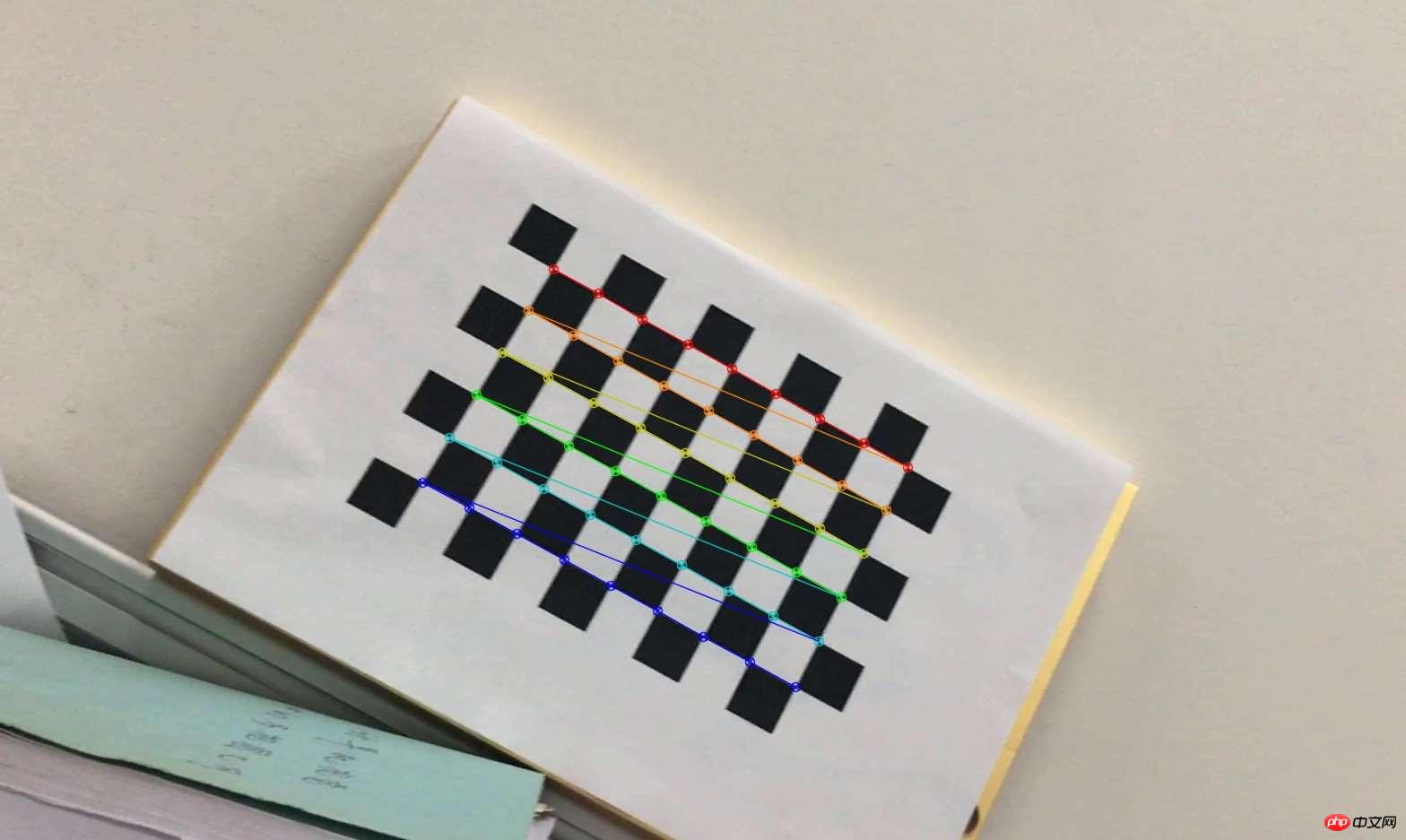
2. チェッカーボードのコーナーポイントの検出 チェッカーボードのテンプレートを見つけるために、openCV の関数 cv2.findChessboardCorners() を使用します。また、使用しているテンプレートの仕様 (8*8 チェッカーボードや 5*5 チェッカーボードなど) をプログラムに伝える必要があります。x 方向と y 方向の数値が等しくないチェッカーボード テンプレートを使用することをお勧めします。次の実験では、10*7 のチェッカーボードを使用します。各正方形の辺の長さは 20 mm、つまり 9*6 個の内部コーナーが含まれます。この関数がテンプレートを検出すると、対応するコーナーポイントを返し、true を返します。もちろん、すべての画像が必要なテンプレートを見つけることができるわけではないため、キャリブレーションに複数の画像を使用できます。チェッカーボードの使用に加えて、ドット マトリックスも使用できます。対応する関数は cv2.findCirclesGrid() です。
コーナーポイントを見つけたら、cv2.cornerSubPix() を使用して、より正確なコーナーピクセル座標を取得できます。 cv2.drawChessboardCorners() を使用して、表示用に画像上にコーナーを描画することもできます。以下の図に示すように:
3. キャリブレーション 上記の手順を通じて、キャリブレーションに使用する 3 次元点と、画像上の対応する 2 次元点ペアを取得しました。キャリブレーションには cv2.calibrateCamera() を使用します。この関数はキャリブレーション結果、カメラの固有パラメータ行列、歪み係数、回転行列、および平行移動ベクトルを返します。
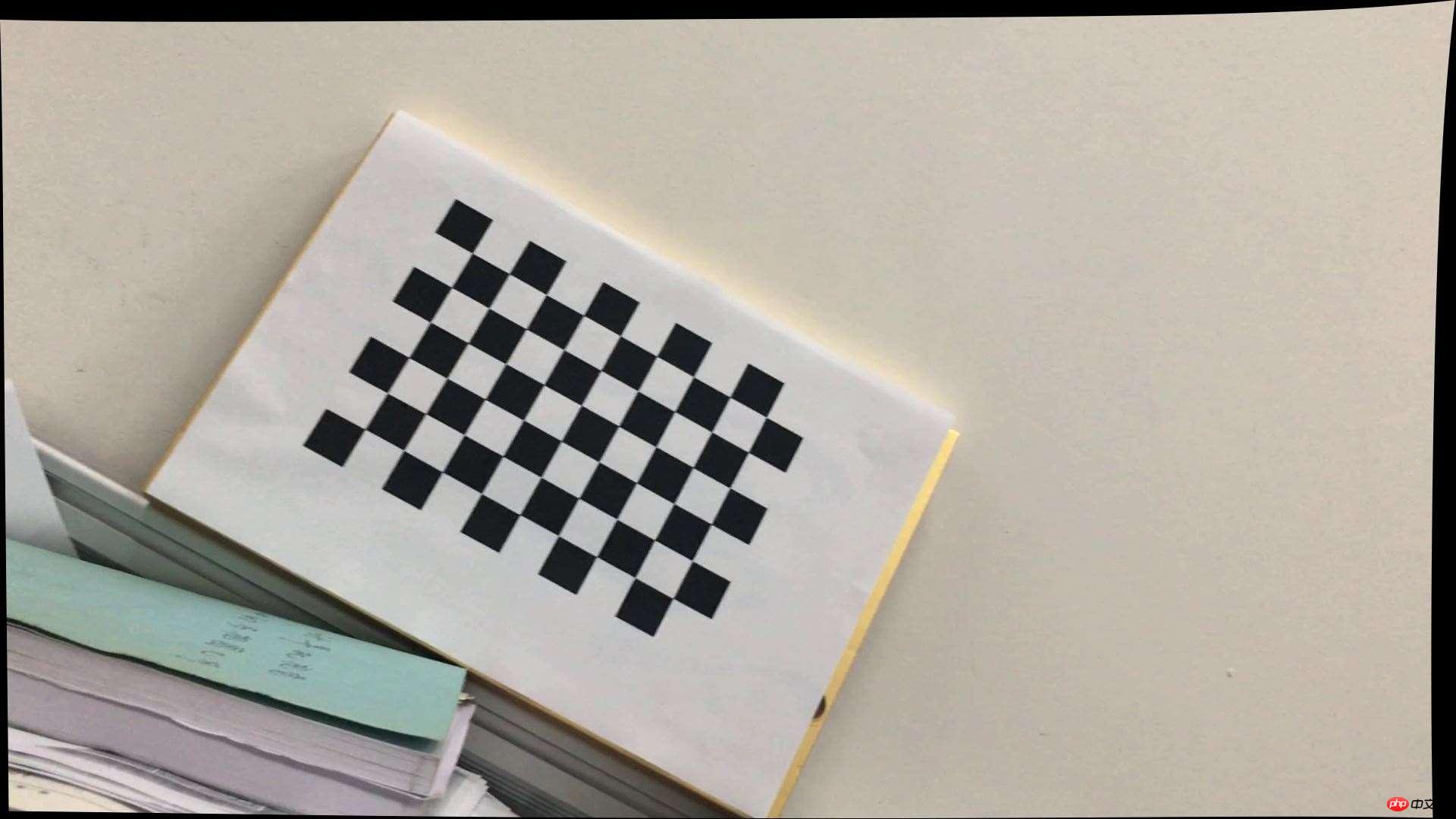
4. 歪み解消 3 番目のステップでは、画像の歪みを解消する前に、cv.getOptimalNewCameraMatrix() を使用して内部パラメータを最適化することもできます。および歪み係数を設定することにより、フリースケールファクターアルファを定義します。 alpha が 0 に設定されている場合は、歪み除去後に不要なピクセルを削除するトリミングされた内部パラメータと歪み係数が返され、alpha が 1 に設定されている場合は、余分な黒ピクセルを含むトリミングされた内部パラメータと歪み係数が返されます。それを切り取るためのROI。
その後、新しく取得した内部パラメータ行列と歪み係数を使用して、画像の歪みを解消します。歪みを解消するには 2 つの方法があります:
(1) cv2.undistort() を使用しますこれは、上記の関数を直接呼び出すだけで歪みを解消した画像を取得できます。歪みを解消した画像を取得します。コードは次のとおりです:
# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
下の図は、画像の歪みを取り除き、黒いピクセルを保持した結果を示しています:
これは 2 段階の方法です。では、まず歪んだ画像から歪んでいない画像へのマッピングを計算し、次にこのマッピング関係を使用して画像の歪みを解消します。
コードは次のとおりです:# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
5. 逆投影誤差 逆投影誤差を通じて、結果の品質を評価できます。 0 に近づくほど、結果はより理想的になります。事前に計算された内部パラメータ行列、歪み係数、回転行列、および平行移動ベクトルを通じて、 cv2.projectPoints() を使用して 3 次元点の 2 次元画像への投影を計算し、次に、次によって取得された点間の誤差を計算します。逆投影と画像上で検出された点。最後に、すべてのキャリブレーション画像の平均誤差を計算します。この値が逆投影誤差となります。
コード
すべてのステップのコードは次のとおりです:
#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
関連推奨事項:
OpenCV cv.Mat および .txt ファイルのデータの読み取りおよび書き込み操作
以上がPython はキャリブレーションに OpenCV を使用しますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7453
7453
 15
1374
52
77
11
14
9
15
1374
52
77
11
14
9

 PSが荷重を見せ続ける理由は何ですか?
Apr 06, 2025 pm 06:39 PM
PSが荷重を見せ続ける理由は何ですか?
Apr 06, 2025 pm 06:39 PM
PSの「読み込み」の問題は、リソースアクセスまたは処理の問題によって引き起こされます。ハードディスクの読み取り速度は遅いか悪いです。CrystaldiskInfoを使用して、ハードディスクの健康を確認し、問題のあるハードディスクを置き換えます。不十分なメモリ:高解像度の画像と複雑な層処理に対するPSのニーズを満たすためのメモリをアップグレードします。グラフィックカードドライバーは時代遅れまたは破損しています:ドライバーを更新して、PSとグラフィックスカードの間の通信を最適化します。ファイルパスが長すぎるか、ファイル名に特殊文字があります。短いパスを使用して特殊文字を避けます。 PS独自の問題:PSインストーラーを再インストールまたは修理します。
 PSが開始されたときにロードの問題を解決する方法は?
Apr 06, 2025 pm 06:36 PM
PSが開始されたときにロードの問題を解決する方法は?
Apr 06, 2025 pm 06:36 PM
ブートがさまざまな理由によって引き起こされる可能性がある場合、「読み込み」に巻き込まれたPS:腐敗したプラグインまたは競合するプラグインを無効にします。破損した構成ファイルの削除または名前変更。不十分なプログラムを閉じたり、メモリをアップグレードしたりして、メモリが不十分であることを避けます。ソリッドステートドライブにアップグレードして、ハードドライブの読み取りをスピードアップします。 PSを再インストールして、破損したシステムファイルまたはインストールパッケージの問題を修復します。エラーログ分析の起動プロセス中にエラー情報を表示します。
 PSがファイルを開いたときにロードの問題を解決する方法は?
Apr 06, 2025 pm 06:33 PM
PSがファイルを開いたときにロードの問題を解決する方法は?
Apr 06, 2025 pm 06:33 PM
「ロード」は、PSでファイルを開くときに発生します。理由には、ファイルが大きすぎるか破損しているか、メモリが不十分で、ハードディスクの速度が遅い、グラフィックカードドライバーの問題、PSバージョンまたはプラグインの競合が含まれます。ソリューションは、ファイルのサイズと整合性を確認し、メモリの増加、ハードディスクのアップグレード、グラフィックカードドライバーの更新、不審なプラグインをアンインストールまたは無効にし、PSを再インストールします。この問題は、PSパフォーマンス設定を徐々にチェックして使用し、優れたファイル管理習慣を開発することにより、効果的に解決できます。
 PSが常にロードされていることを常に示しているときに、ロードの問題を解決する方法は?
Apr 06, 2025 pm 06:30 PM
PSが常にロードされていることを常に示しているときに、ロードの問題を解決する方法は?
Apr 06, 2025 pm 06:30 PM
PSカードは「ロード」ですか?ソリューションには、コンピューターの構成(メモリ、ハードディスク、プロセッサ)の確認、ハードディスクの断片化のクリーニング、グラフィックカードドライバーの更新、PS設定の調整、PSの再インストール、優れたプログラミング習慣の開発が含まれます。
 PSフェザーリングは、遷移の柔らかさをどのように制御しますか?
Apr 06, 2025 pm 07:33 PM
PSフェザーリングは、遷移の柔らかさをどのように制御しますか?
Apr 06, 2025 pm 07:33 PM
羽毛の鍵は、その漸進的な性質を理解することです。 PS自体は、勾配曲線を直接制御するオプションを提供しませんが、複数の羽毛、マッチングマスク、および細かい選択により、半径と勾配の柔らかさを柔軟に調整して、自然な遷移効果を実現できます。
 インストール後にMySQLの使用方法
Apr 08, 2025 am 11:48 AM
インストール後にMySQLの使用方法
Apr 08, 2025 am 11:48 AM
この記事では、MySQLデータベースの操作を紹介します。まず、MySQLWorkBenchやコマンドラインクライアントなど、MySQLクライアントをインストールする必要があります。 1. mysql-uroot-pコマンドを使用してサーバーに接続し、ルートアカウントパスワードでログインします。 2。CreatedAtaBaseを使用してデータベースを作成し、データベースを選択します。 3. createTableを使用してテーブルを作成し、フィールドとデータ型を定義します。 4. INSERTINTOを使用してデータを挿入し、データをクエリし、更新することでデータを更新し、削除してデータを削除します。これらの手順を習得することによってのみ、一般的な問題に対処することを学び、データベースのパフォーマンスを最適化することでMySQLを効率的に使用できます。
 MySQLインストール後にデータベースのパフォーマンスを最適化する方法
Apr 08, 2025 am 11:36 AM
MySQLインストール後にデータベースのパフォーマンスを最適化する方法
Apr 08, 2025 am 11:36 AM
MySQLパフォーマンスの最適化は、インストール構成、インデックス作成、クエリの最適化、監視、チューニングの3つの側面から開始する必要があります。 1。インストール後、INNODB_BUFFER_POOL_SIZEパラメーターやclose query_cache_sizeなど、サーバーの構成に従ってmy.cnfファイルを調整する必要があります。 2。過度のインデックスを回避するための適切なインデックスを作成し、説明コマンドを使用して実行計画を分析するなど、クエリステートメントを最適化します。 3. MySQL独自の監視ツール(ShowProcessList、ShowStatus)を使用して、データベースの健康を監視し、定期的にデータベースをバックアップして整理します。これらの手順を継続的に最適化することによってのみ、MySQLデータベースのパフォーマンスを改善できます。
 PSカードがロードインターフェイスにある場合はどうすればよいですか?
Apr 06, 2025 pm 06:54 PM
PSカードがロードインターフェイスにある場合はどうすればよいですか?
Apr 06, 2025 pm 06:54 PM
PSカードの読み込みインターフェイスは、ソフトウェア自体(ファイルの破損またはプラグインの競合)、システム環境(ドライバーまたはシステムファイルの破損)、またはハードウェア(ハードディスクの破損またはメモリスティックの障害)によって引き起こされる場合があります。まず、コンピューターリソースで十分かどうかを確認し、バックグラウンドプログラムを閉じ、メモリとCPUリソースをリリースします。 PSのインストールを修正するか、プラグインの互換性の問題を確認してください。 PSバージョンを更新またはフォールバックします。グラフィックカードドライバーをチェックして更新し、システムファイルチェックを実行します。上記の問題をトラブルシューティングする場合は、ハードディスク検出とメモリテストを試すことができます。
