

データサイエンティストが知っておくべき6つのクラスタリングアルゴリズム

現在、Google ニュースなどの多くのアプリケーションは、主な実装方法としてクラスタリング アルゴリズムを使用しており、大量のラベルなしデータを使用して強力なトピック クラスターを構築できます。この記事では、最も基本的な K 平均法クラスタリングから強力な密度ベースの手法まで 6 種類の主流の手法を紹介しますが、それぞれに専門分野やシナリオがあり、基本的な考え方は必ずしもクラスタリング手法に限定されるものではありません。


- 平均シフトを説明するために、上の図に示すように、2 次元空間内の一連の点を考慮します。点 C (ランダムに選択) を中心とし、半径 r のコアを持つ円形のスライディング ウィンドウから始めます。平均シフトは、収束するまで各ステップでより高密度の領域に向かって反復的に移動する山登りアルゴリズムです。
- 各反復で、スライディング ウィンドウは、中心点をウィンドウ内の点の平均に向かって移動することによって、より高密度の領域に向かって移動します (したがって、この名前が付けられています)。スライディング ウィンドウ内の密度は、その中のポイントの数に比例します。当然のことながら、ウィンドウ内のポイントの平均に向かって移動すると、ポイント密度がより高い領域に向かって徐々に移動します。
- カーネル内により多くのポイントを収容できる方向がなくなるまで、平均に従ってスライディング ウィンドウを移動し続けます。上の図を見てください。密度が増加しなくなるまで (つまり、ウィンドウ内の点の数が) 円を移動し続けます。
- ステップ 1 ~ 3 のプロセスは、すべてのポイントが 1 つのウィンドウ内に配置されるまで、多くのスライディング ウィンドウを介して完了します。複数のスライディング ウィンドウが重なる場合、最も多くのポイントを含むウィンドウが保持されます。次に、データ ポイントが配置されているスライディング ウィンドウに基づいてクラスタリングが実行されます。
すべてのスライディング ウィンドウの最初から最後までのプロセス全体を以下に示します。各黒い点はスライディング ウィンドウの重心を表し、各灰色の点はデータ ポイントを表します。

平均シフト クラスタリングの全プロセス
K 平均法クラスタリングと比較して、この方法では平均シフトが一定であるため、クラスターの数を選択する必要がありません。これを自動的に検出します。これは大きな利点です。クラスターの中心が最大点密度に向かってクラスター化するという事実も、自然なデータ駆動型の意味を理解し、それに適応するのが非常に直感的であるため、非常に満足のいくものです。欠点は、ウィンドウ サイズ/半径「r」の選択が重要ではない可能性があることです。
密度ベースのクラスタリング手法 (DBSCAN)
DBSCAN は、平均シフトに似た密度ベースのクラスタリング アルゴリズムですが、いくつかの重要な利点があります。以下の別の楽しいグラフィックをチェックして、始めましょう!

DBSCAN クラスタリング
- DBSCAN は、まだ訪問されていない任意の開始データ ポイントから開始します。この点の近傍が距離 ε で抽出されます (ε 距離内のすべての点が近傍点です)。
- この近傍内に十分な数のポイントがある場合 (minPoints による)、クラスタリング プロセスが開始され、現在のデータ ポイントが新しいクラスターの最初のポイントになります。それ以外の場合、ポイントはノイズとしてマークされます (後で、このノイズ ポイントが依然としてクラスターの一部になる可能性があります)。どちらの場合も、ポイントは「訪問済み」としてマークされます。
- 新しいクラスターの最初の点の場合、ε 距離近傍内の点もクラスターの一部になります。 ε 近傍内のすべての点を同じクラスターに所属させるこのプロセスは、クラスターに追加されたすべての新しい点に対して繰り返されます。
- クラスター内のすべての点が決定されるまで、つまりクラスターの ε 近傍内のすべての点が訪問されてマークされるまで、ステップ 2 と 3 を繰り返します。
- 現在のクラスターの処理が完了すると、新しい未訪問のポイントが取得されて処理され、その結果、別のクラスターまたはノイズが発見されます。このプロセスは、すべてのポイントが訪問済みとしてマークされるまで繰り返されます。すべてのポイントが訪問されているため、各ポイントは何らかのクラスターまたはノイズに属します。
DBSCAN には、他のクラスタリング アルゴリズムに比べて多くの利点があります。まず、固定数のクラスターはまったく必要ありません。また、データ ポイントが大きく異なる場合でも、単にデータ ポイントをクラスターにグループ化する平均シフトとは異なり、外れ値をノイズとして識別します。さらに、あらゆるサイズと形状のクラスターを非常によく見つけることができます。
DBSCAN の主な欠点は、クラスターの密度が異なる場合、他のクラスタリング アルゴリズムほどパフォーマンスが低下することです。これは、密度が変化すると、近傍点を特定するために使用される距離のしきい値 ε と minPoints の設定がクラスターごとに変化するためです。この欠点は、距離閾値 ε の推定が再び困難になるため、非常に高次元のデータでも発生します。
混合ガウス モデル (GMM) を使用した予想最大 (EM) クラスタリング
K 平均法の主な欠点は、クラスター中心平均の単純な使用です。以下の図から、これが最良のアプローチではない理由がわかります。左側には、同じ平均値を中心とした異なる半径を持つ 2 つの円形クラスターがあることがはっきりとわかります。これらのクラスターの平均値は非常に近いため、K 平均法ではこの状況に対処できません。 K 平均法は、クラスターが円形でない場合にも失敗します。これもクラスターの中心として平均を使用するためです。

K 平均法の 2 つの失敗例
混合ガウス モデル (GMM) は、K 平均法よりも柔軟性が高くなります。 GMM の場合、データ ポイントはガウス分布であると仮定します。これは、平均を使用してデータ ポイントが円形であると仮定するよりも制限の少ない仮定です。このようにして、クラスターの形状を記述するための 2 つのパラメーター、平均と標準偏差が得られます。 2D を例にとると、これは、クラスターがあらゆる種類の楕円形を取ることができることを意味します (x 方向と y 方向の両方に標準偏差があるため)。したがって、各ガウス分布は単一のクラスターに割り当てられます。
各クラスターのガウス パラメーター (平均や標準偏差など) を見つけるには、Expectation Maximum (EM) と呼ばれる最適化アルゴリズムを使用します。以下の図を見てください。これはクラスターへのガウス近似の例です。その後、GMM を使用して最大期待値クラスタリングのプロセスを続行できます。

GMM を使用した EM クラスタリング
- 最初にクラスターの数を選択し (K 平均法によって行われる)、各ガウス分布パラメーターをランダムに初期化します。クラスターの。データをざっと見て、初期パラメータを適切に推測することもできます。ただし、上でわかるように、ガウス分布は最初は非常に貧弱ですが、すぐに最適化されるため、これは 100% 必要というわけではないことに注意してください。
- 各クラスターのガウス分布を考慮して、各データ ポイントが特定のクラスターに属する確率を計算します。点がガウス分布の中心に近づくほど、その点がそのクラスターに属する可能性が高くなります。ガウス分布では、ほとんどのデータがクラスターの中心に近いと想定されているため、これは直感的に理解できるはずです。
- これらの確率に基づいて、クラスター内のデータ ポイントの確率を最大化する新しいガウス分布パラメーターのセットを計算します。データ ポイントの位置の加重合計を使用して、これらの新しいパラメーターを計算します。ここで、重みは、データ ポイントがその特定のクラスターに属する確率です。これを視覚的に説明するには、上の画像、特に例として使用する黄色のクラスターを見てみましょう。分布は最初の反復ですぐに始まりますが、黄色の点のほとんどが分布の右側にあることがわかります。確率加重和を計算すると、中心付近に点がいくつかありますが、ほとんどが右側にあります。したがって、分布の平均は当然これらの点に近くなります。また、ほとんどの点が「右上から左下」に分布していることがわかります。したがって、確率の加重合計を最大化するために、標準偏差が変更されて、点によりよく適合する楕円が作成されます。
- 収束するまでステップ 2 と 3 を繰り返します。収束すると、反復間で分布がほとんど変化しません。
GMM を使用することには 2 つの重要な利点があります。まず、GMM はクラスター共分散の点で K-Means よりも柔軟であり、標準偏差パラメーターにより、クラスターは円に限定されるのではなく、任意の楕円形をとることができます。 K 平均法は実際には GMM の特殊なケースであり、各クラスターの共分散がすべての次元で 0 に近くなります。第 2 に、GMM は確率を使用するため、データ ポイントごとに多数のクラスターが存在する可能性があります。したがって、データ ポイントが 2 つの重なり合うクラスターの中央にある場合、そのデータ ポイントの X パーセントがクラス 1 に属し、Y パーセントがクラス 2 に属すると言うだけで、そのクラスを定義できます。つまり、GMM はハイブリッド資格をサポートします。
凝集型階層クラスタリング
階層クラスタリング アルゴリズムは、実際にはトップダウンまたはボトムアップの 2 つのカテゴリに分類されます。ボトムアップ アルゴリズムでは、まず各データ ポイントを 1 つのクラスターとして扱い、次にすべてのクラスターがすべてのデータ ポイントを含む 1 つのクラスターにマージされるまで、2 つのクラスターを連続してマージ (または集約) します。したがって、ボトムアップ階層クラスタリングは、凝集型階層クラスタリング (HAC) と呼ばれます。このクラスターの階層はツリー (または樹状図) で表されます。ツリーのルートはすべてのサンプルを収集する唯一のクラスターであり、葉は 1 つのサンプルのみを含むクラスターです。アルゴリズムのステップに入る前に、以下の凡例を参照してください。

凝集型階層クラスタリング
- まず、各データ ポイントを単一のクラスターとして扱います。つまり、データ セット内に X データ ポイントがある場合、X 個のクラスターがあります。次に、2 つのクラスター間の距離を測定する距離メトリックを選択します。例として、2 つのクラスター間の距離を、最初のクラスターのデータ ポイントと 2 番目のクラスターのデータ ポイント間の平均距離として定義する平均リンケージを使用します。
- 各反復で、2 つのクラスターを 1 つにマージします。マージされる 2 つのクラスターの平均リンケージは最小になる必要があります。つまり、選択した距離メトリックによれば、2 つのクラスター間の距離が最小であるため、最も類似しており、マージする必要があります。
- ツリーのルートに到達するまで、つまりすべてのデータ ポイントを含むクラスターが 1 つだけになるまで、ステップ 2 を繰り返します。このようにして、クラスターのマージをいつ停止するか、つまりツリーの構築をいつ停止するかを選択するだけで、最終的に必要なクラスターの数を選択できます。
階層的クラスタリングでは、クラスターの数を指定する必要はありません。ツリーを構築しているので、最適に見えるクラスターの数を選択することもできます。さらに、このアルゴリズムは距離メトリックの選択に影響されません。他のクラスタリング アルゴリズムでは距離メトリックの選択が重要であるのに対し、それらはすべて同等に良好に実行されます。階層的クラスタリング手法の特に良い例は、基になるデータに階層構造があり、その階層を復元したい場合ですが、他のクラスタリング アルゴリズムではこれを行うことができません。 K-Means や GMM の線形複雑さとは異なり、階層クラスタリングのこれらの利点は、時間計算量が O(n³) であるため、効率が低下するという犠牲を伴います。
グラフ コミュニティ検出
データがネットワークまたはグラフ (グラフ) として表現できる場合、グラフ コミュニティ検出方法を使用してクラスタリングを完了できます。このアルゴリズムでは、グラフ コミュニティは通常、ネットワークの他の部分よりも密接に接続された頂点のサブセットとして定義されます。
おそらく最も直感的なケースはソーシャル ネットワークです。頂点は人を表し、頂点を接続するエッジは友人やファンであるユーザーを表します。ただし、システムをネットワークとしてモデル化するには、さまざまなコンポーネントを効率的に接続する方法を見つける必要があります。クラスタリングのためのグラフ理論の革新的なアプリケーションには、画像データの特徴抽出、遺伝子制御ネットワークの分析などが含まれます。
以下は、Wikipedia ページからのリンクに基づいて接続された、最近閲覧した 8 つの Web サイトを示す簡単な図です。

これらの頂点の色はグループ関係を示し、サイズは中心性に基づいて決定されます。これらのクラスターは実生活でも意味を持ちます。黄色の頂点は通常、参照/検索サイトであり、青色の頂点はすべてオンライン公開サイト (記事、ツイート、またはコード) です。
ネットワークをグループにクラスタ化したとします。このモジュール性スコアを使用して、クラスタリングの品質を評価できます。スコアが高いほど、ネットワークが「正確な」グループにセグメント化されたことを意味し、スコアが低いほど、クラスタリングがランダムに近いことを意味します。以下の図に示すように:

モジュール性は次の式を使用して計算できます:

ここで、L はネットワーク内のエッジ 量 k_i と k_j は各頂点の次数を指し、各行と列の項を合計することで見つけることができます。 2 を乗算し、2L で割ることは、ネットワークがランダムに割り当てられた場合の頂点 i と j の間のエッジの予想数を表します。
全体として、括弧内の用語は、ネットワークの実際の構造と、ランダムに組み合わせた場合の予想される構造との違いを表します。その値を調べると、A_ij = 1 かつ ( k_i k_j ) / 2L が小さいときに最大値を返すことがわかります。これは、固定点 i と j の間に「予期しない」エッジがある場合、結果の値が大きくなるということを意味します。
最後のδc_i、c_jは有名なクロネッカーδ関数(クロネッカーデルタ関数)です。 Python の説明は次のとおりです:

グラフのモジュール性は上記の式で計算でき、モジュール性が高いほど、ネットワークがさまざまなグループにクラスター化される度合いが高くなります。したがって、ネットワークをクラスタ化する最適な方法は、最適化手法を通じて最大限のモジュール性を探すことによって見つけることができます。
組み合わせ論によれば、頂点が 8 つしかないネットワークの場合、4,140 の異なるクラスタリング方法があることがわかります。 16 頂点のネットワークは 100 億通り以上にクラスタ化されます。 32 個の頂点を持つネットワークで可能なクラスタリング手法は 128 セプティリオン (10^21) を超えます。ネットワークに 80 個の頂点がある場合、可能なクラスタリング手法の数は、観測可能な宇宙のクラスタリング手法の数を超えています。
したがって、あらゆる可能性を試すことなく、最高のモジュール性スコアをもたらすクラスターの評価にうまく機能するヒューリスティックに頼らなければなりません。これは、Fast-Greedy Modularity-Maximization と呼ばれるアルゴリズムで、上記の凝集型階層クラスタリング アルゴリズムに似ています。 Mod-Max は距離に基づいてグループを融合するのではなく、モジュール性の変化に基づいてグループを融合するだけです。
その仕組みは次のとおりです:
- まず最初に各頂点を独自のグループに割り当て、次にネットワーク全体のモジュール性 M を計算します。
- ステップ 1 では、各コミュニティ ペアが少なくとも 1 つの片側リンクによってリンクされていることが必要です。2 つのコミュニティが結合した場合、アルゴリズムは結果として生じるモジュール性の変化 ΔM を計算します。
- 2 番目のステップは、ΔM の増加が最も大きいグループのペアを選択し、それらを結合することです。次に、このクラスターに対して新しいモジュール性 M が計算され、記録されます。
- ステップ 1 と 2 を繰り返し、そのたびにグループ ペアを融合して、最終的に ΔM の最大ゲインが得られ、新しいクラスタリング パターンとそれに対応するモジュール性スコア M を記録します。
- すべての頂点が巨大なクラスターにグループ化されたら停止できます。次に、アルゴリズムはこのプロセスでレコードを検査し、最も高い M 値が返されたクラスタリング パターンを見つけます。これは返されたグループ構造です。
コミュニティ検出は、グラフ理論の人気のある研究分野です。その限界は主に、いくつかの小さなクラスターが無視され、構造化グラフ モデルにのみ適用できるという事実に反映されています。ただし、このタイプのアルゴリズムは、一般的な構造化データや実際のネットワーク データでは非常に優れたパフォーマンスを発揮します。
結論
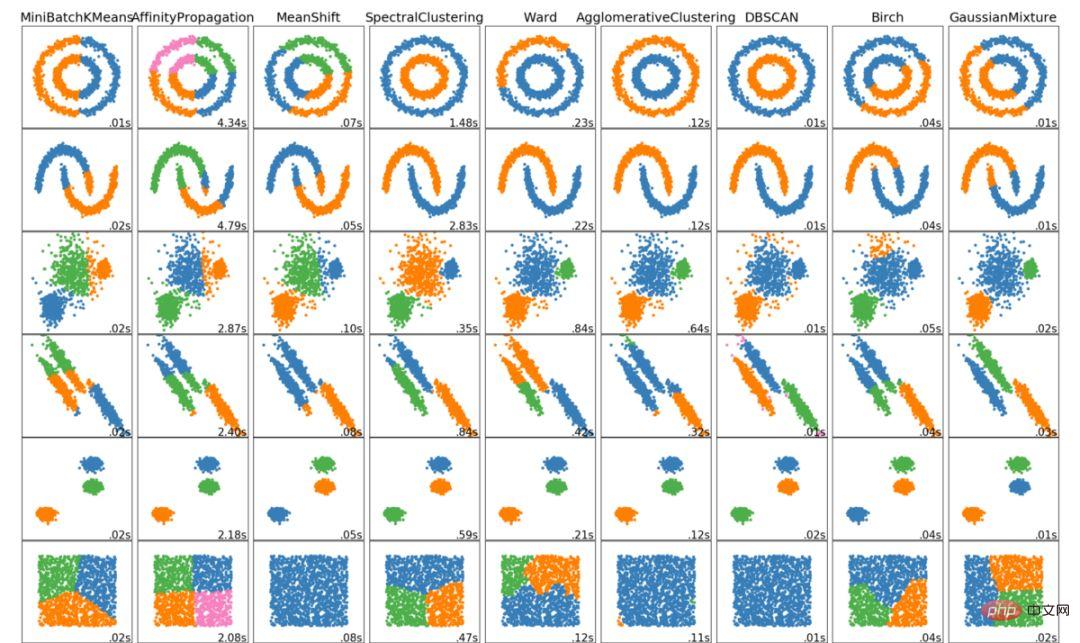
上記は、データ サイエンティストが知っておくべき 6 つの主要なクラスタリング アルゴリズムです。この記事は、さまざまなアルゴリズムの視覚化を示して終了します。
以上がデータサイエンティストが知っておくべき6つのクラスタリングアルゴリズムの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7616
7616
 15
1388
52
89
11
30
136
15
1388
52
89
11
30
136

 この記事では、SHAP: 機械学習のモデルの説明について説明します。
Jun 01, 2024 am 10:58 AM
この記事では、SHAP: 機械学習のモデルの説明について説明します。
Jun 01, 2024 am 10:58 AM
機械学習とデータ サイエンスの分野では、モデルの解釈可能性が常に研究者や実務家に焦点を当ててきました。深層学習やアンサンブル手法などの複雑なモデルが広く適用されるようになったことで、モデルの意思決定プロセスを理解することが特に重要になってきました。 Explainable AI|XAI は、モデルの透明性を高めることで、機械学習モデルに対する信頼と自信を構築するのに役立ちます。モデルの透明性の向上は、複数の複雑なモデルの普及や、モデルを説明するための意思決定プロセスなどの方法によって実現できます。これらの方法には、特徴重要度分析、モデル予測間隔推定、ローカル解釈可能性アルゴリズムなどが含まれます。特徴重要度分析では、入力特徴に対するモデルの影響度を評価することで、モデルの意思決定プロセスを説明できます。モデルの予測間隔の推定
 C++ での機械学習アルゴリズムの実装: 一般的な課題と解決策
Jun 03, 2024 pm 01:25 PM
C++ での機械学習アルゴリズムの実装: 一般的な課題と解決策
Jun 03, 2024 pm 01:25 PM
C++ の機械学習アルゴリズムが直面する一般的な課題には、メモリ管理、マルチスレッド、パフォーマンスの最適化、保守性などがあります。解決策には、スマート ポインター、最新のスレッド ライブラリ、SIMD 命令、サードパーティ ライブラリの使用、コーディング スタイル ガイドラインの遵守、自動化ツールの使用が含まれます。実践的な事例では、Eigen ライブラリを使用して線形回帰アルゴリズムを実装し、メモリを効果的に管理し、高性能の行列演算を使用する方法を示します。
 あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
機械学習は人工知能の重要な分野であり、明示的にプログラムしなくてもコンピューターにデータから学習して能力を向上させる機能を提供します。機械学習は、画像認識や自然言語処理から、レコメンデーションシステムや不正行為検出に至るまで、さまざまな分野で幅広く応用されており、私たちの生活様式を変えつつあります。機械学習の分野にはさまざまな手法や理論があり、その中で最も影響力のある 5 つの手法は「機械学習の 5 つの流派」と呼ばれています。 5 つの主要な学派は、象徴学派、コネクショニスト学派、進化学派、ベイジアン学派、およびアナロジー学派です。 1. 象徴主義は、象徴主義とも呼ばれ、論理的推論と知識の表現のためのシンボルの使用を強調します。この学派は、学習は既存の既存の要素を介した逆演繹のプロセスであると信じています。
 説明可能な AI: 複雑な AI/ML モデルの説明
Jun 03, 2024 pm 10:08 PM
説明可能な AI: 複雑な AI/ML モデルの説明
Jun 03, 2024 pm 10:08 PM
翻訳者 | Li Rui によるレビュー | 今日、人工知能 (AI) および機械学習 (ML) モデルはますます複雑になっており、これらのモデルによって生成される出力はブラックボックスになっており、関係者に説明することができません。 Explainable AI (XAI) は、利害関係者がこれらのモデルがどのように機能するかを理解できるようにし、これらのモデルが実際に意思決定を行う方法を確実に理解できるようにし、AI システムの透明性、信頼性、およびこの問題を解決するための説明責任を確保することで、この問題を解決することを目指しています。この記事では、さまざまな説明可能な人工知能 (XAI) 手法を検討して、その基礎となる原理を説明します。説明可能な AI が重要であるいくつかの理由 信頼と透明性: AI システムが広く受け入れられ、信頼されるためには、ユーザーは意思決定がどのように行われるかを理解する必要があります
 フラッシュ アテンションは安定していますか?メタとハーバードは、モデルの重みの偏差が桁違いに変動していることを発見しました
May 30, 2024 pm 01:24 PM
フラッシュ アテンションは安定していますか?メタとハーバードは、モデルの重みの偏差が桁違いに変動していることを発見しました
May 30, 2024 pm 01:24 PM
MetaFAIR はハーバード大学と協力して、大規模な機械学習の実行時に生成されるデータの偏りを最適化するための新しい研究フレームワークを提供しました。大規模な言語モデルのトレーニングには数か月かかることが多く、数百、さらには数千の GPU を使用することが知られています。 LLaMA270B モデルを例にとると、そのトレーニングには合計 1,720,320 GPU 時間が必要です。大規模なモデルのトレーニングには、これらのワークロードの規模と複雑さにより、特有のシステム上の課題が生じます。最近、多くの機関が、SOTA 生成 AI モデルをトレーニングする際のトレーニング プロセスの不安定性を報告しています。これらは通常、損失スパイクの形で現れます。たとえば、Google の PaLM モデルでは、トレーニング プロセス中に最大 20 回の損失スパイクが発生しました。数値的なバイアスがこのトレーニングの不正確さの根本原因です。
 改良された検出アルゴリズム: 高解像度の光学式リモートセンシング画像でのターゲット検出用
Jun 06, 2024 pm 12:33 PM
改良された検出アルゴリズム: 高解像度の光学式リモートセンシング画像でのターゲット検出用
Jun 06, 2024 pm 12:33 PM
01 今後の概要 現時点では、検出効率と検出結果の適切なバランスを実現することが困難です。我々は、光学リモートセンシング画像におけるターゲット検出ネットワークの効果を向上させるために、多層特徴ピラミッド、マルチ検出ヘッド戦略、およびハイブリッドアテンションモジュールを使用して、高解像度光学リモートセンシング画像におけるターゲット検出のための強化されたYOLOv5アルゴリズムを開発しました。 SIMD データセットによると、新しいアルゴリズムの mAP は YOLOv5 より 2.2%、YOLOX より 8.48% 優れており、検出結果と速度のバランスがより優れています。 02 背景と動機 リモート センシング技術の急速な発展に伴い、航空機、自動車、建物など、地表上の多くの物体を記述するために高解像度の光学式リモート センシング画像が使用されています。リモートセンシング画像の判読における物体検出
 C++ の機械学習: C++ で一般的な機械学習アルゴリズムを実装するためのガイド
Jun 03, 2024 pm 07:33 PM
C++ の機械学習: C++ で一般的な機械学習アルゴリズムを実装するためのガイド
Jun 03, 2024 pm 07:33 PM
C++ では、機械学習アルゴリズムの実装には以下が含まれます。 線形回帰: 連続変数を予測するために使用されるステップには、データの読み込み、重みとバイアスの計算、パラメーターと予測の更新が含まれます。ロジスティック回帰: 離散変数の予測に使用されます。このプロセスは線形回帰に似ていますが、予測にシグモイド関数を使用します。サポート ベクター マシン: サポート ベクターの計算とラベルの予測を含む強力な分類および回帰アルゴリズム。
 58 ポートレート プラットフォームの構築におけるアルゴリズムの適用
May 09, 2024 am 09:01 AM
58 ポートレート プラットフォームの構築におけるアルゴリズムの適用
May 09, 2024 am 09:01 AM
1. 58 Portraits プラットフォーム構築の背景 まず、58 Portraits プラットフォーム構築の背景についてお話ししたいと思います。 1. 従来のプロファイリング プラットフォームの従来の考え方ではもはや十分ではありません。ユーザー プロファイリング プラットフォームを構築するには、複数のビジネス分野からのデータを統合して、ユーザーの行動や関心を理解するためのデータ マイニングも必要です。最後に、ユーザー プロファイル データを効率的に保存、クエリ、共有し、プロファイル サービスを提供するためのデータ プラットフォーム機能も必要です。自社構築のビジネス プロファイリング プラットフォームとミドルオフィス プロファイリング プラットフォームの主な違いは、自社構築のプロファイリング プラットフォームは単一のビジネス ラインにサービスを提供し、オンデマンドでカスタマイズできることです。ミッドオフィス プラットフォームは複数のビジネス ラインにサービスを提供し、複雑な機能を備えていることです。モデリングを提供し、より一般的な機能を提供します。 2.58 中間プラットフォームのポートレート構築の背景のユーザーのポートレート 58
