

ROS 2 を使用してロボットのハードウェア アクセラレーションを簡素化する方法

翻訳者 | Li Rui
レビュアー | Sun Shujuan
ロボットを開発する場合、システム統合がプロジェクト リソースのほとんどを占めることが多く、これは最終アプリケーションの開発よりも重要です。ローエンドの産業用協働ロボットの出現により、既存のハードウェア上で動作するソフトウェアの開発のみに注力するソフトウェア開発者も出てきました。ただし、ロボットのハードウェア機能とソフトウェア機能の間には重要な関係があります。より専門的でエネルギー効率が高く、安全で高性能なロボットを作成するには、コンピューティング ハードウェアの設計制御を維持する必要があります。

ハードウェアの課題とソフトウェアのスキル ロボット工学の専門家が、将来求められるより優れた、より高速なロボットを提供したい場合、ハードウェアが直面する障害を克服する必要があります。ムーア以降のコンピューティングの世界では、最新世代のマイクロプロセッサを採用するためにハードウェアをアップグレードしても、アプリケーションのパフォーマンスの望ましいアップグレードは実現されません。その前進への道は、もはや最新チップを待つことにありません。多くの場合、ハードウェア アクセラレーションが必要な効果を達成する唯一の方法です。
このハードウェアの課題は、ロボット工学などの分野の開発者の作業を複雑にしています。開発者のスキルはソフトウェア開発に偏っていることが多いためです。これは、新しい産業用ロボットの市場需要に応えるためには、アダプティブ コンピューティング ハードウェアを設計するという見通しに直面しなければならないことを意味します。生産ラインや倉庫などの分野でロボットを使用して生産性を向上させる企業は、さらなる柔軟性、より微細な位置制御、優れたビジョンベースの機能、改善されたデータキャプチャ、低消費電力を提供するデバイスを求めています。
ロボティクス ハードウェア アクセラレーションの主な原理は、従来の制御主導のアプローチとは異なり、ソフトウェア開発に対するハイブリッド制御とデータ主導のアプローチにより、チームが最適な量のハードウェアを割り当てるカスタム コンピューティング アーキテクチャを設計できるということです。アプリケーションリソース。
実装に関しては、ヘテロジニアス コンピューティング モデルが必要です。これは、制御フロー計算に優れた CPU と GPU を活用し、データ フロー計算を処理する FPGA の強みを活用します。このアプローチは、柔軟性と CPU/GPU の完全な制御の両方を提供し、低消費電力、高性能、低遅延、ハードウェア アクセラレーションの決定性を備えた複雑な計算を実装します。現在、さまざまなベンダーが、このハイブリッド コンピューティング モデルの利点を提供する、AMD-Xilinx Kria™ SOM とそれに関連する Kria ロボット スタックなどの適応型システム オン チップ (SoC) およびシステム オン モジュール (SOM) デバイスを提供しています。この表は、これらの異なるモデルを比較しています。
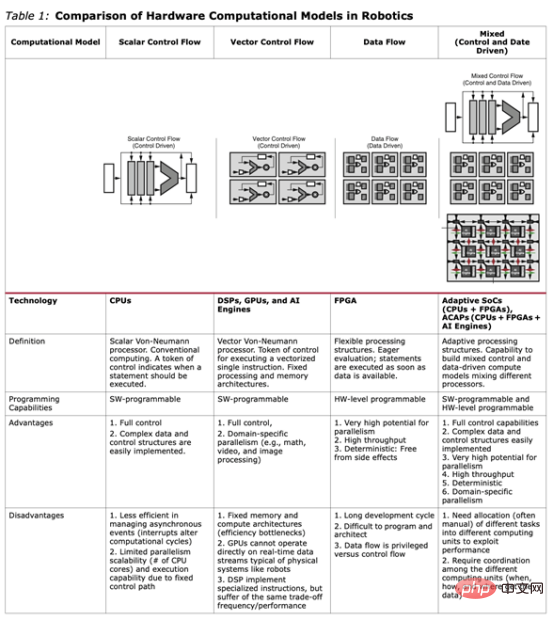 適応型システム オン チップ (SoC) とシステム オン モジュール (SOM) を使用すると、ロボット工学の専門家は、正しいデータ パスと制御を作成するアーキテクチャをプログラミングすることでマシンの動作を構築できます。メカニズム。ただし、確立されたツールや技術を使用してこのようなアーキテクチャをプログラムするには、高度なエンジニアリング スキルが必要です。
適応型システム オン チップ (SoC) とシステム オン モジュール (SOM) を使用すると、ロボット工学の専門家は、正しいデータ パスと制御を作成するアーキテクチャをプログラミングすることでマシンの動作を構築できます。メカニズム。ただし、確立されたツールや技術を使用してこのようなアーキテクチャをプログラムするには、高度なエンジニアリング スキルが必要です。
ロボット工学者は適切なハードウェアと組み込み設計の専門知識を欠いており、現在のロボットのタスクを解決するために計算グラフの形式で動作を構築することに慣れています。彼らは多くの場合、C を使用して、高度なソフトウェア エンジニアリングの実践を通じて複雑なリアルタイムの決定論的システムを作成します。
ロボット オペレーティング システム (ROS) 上に構築
ロボット工学者が利用可能なハードウェア アクセラレーション テクノロジを活用できるようにするには、別のアプローチが必要です。理想的には、このアプローチにより、使い慣れた開発環境 (ROS など) でカスタム ハードウェアを作成し、使い慣れたツール (Gazebo など) を使用してそれをシミュレートできるようになります。
ROS はロボット アプリケーション開発の事実上の業界標準であり、2020 年の ROS2 の登場以降、その傾向はさらに強くなっています。これは業界全体のロボティクス アプリケーションのデフォルトのソフトウェア開発キット (SDK) となり、現在多くのグループが ROS と Gazebo を使用しています。
アダプティブ コンピューティングを ROS に統合するこれまでの取り組みでは、ハードウェア エンジニアの観点からこの課題に対処してきました。ユーザーが組み込みフローやハードウェア フローの経験があり、RTL、HDL、HLS などの概念やそれらの操作に使用される設計ツールに精通していることを前提としています。同様に、埋め込みターゲットにデプロイするには、Yocto、OpenEmbedded、および関連ツールについてある程度の理解が必要です。
ほとんどのロボット工学専門家がこのようなバックグラウンドを持っていないことを理解して、ROS2 ハードウェア アクセラレーション ワーキング グループ (HAWG) は、組み込みプロセスを ROS エコシステムに直接統合するために ROS 中心のアプローチを採用しています。ロボット工学者がデスクトップ ワークステーションに ROS ワークスペースを構築するときに楽しんでいるのと同様のエクスペリエンスを提供することを目的としています。
HAWG の研究は、アダプティブ コンピューティングを活用するための ROS 計算グラフの最適化に関する公開された研究と、プログラマブル ロジックのグラフの一部を高速化するためのツールと方法に関する推奨事項に基づいています。これに加えて、HAWG は現在、C や OpenCL などの使い慣れた言語に焦点を当てたアーキテクチャ (下の図) を提案しています。 ##################################
ROS 2 と HAWG のスタックによりハードウェアの高速化が促進されます
提案されたアーキテクチャはプラットフォームに依存しないため、エッジ施設、ワークステーション、データセンター、またはクラウド コンピューティング プラットフォームに適しており、テクノロジーに依存しないため、FPGA をターゲットにすることができます。 CPU と GPU を備えており、さまざまなモジュールやマザーボードに簡単に移植できます。
最終的には、この取り組みにより、ほとんどのロボット工学専門家がハードウェア アクセラレーションの機会を利用して、次世代の高度で複雑なロボットを実装できるようになります。
元のタイトル: ROS 2 を使用したロボットのハードウェア アクセラレーションの簡素化 、著者: Ben Dickson
以上がROS 2 を使用してロボットのハードウェア アクセラレーションを簡素化する方法の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1662
1662
 14
1418
52
1311
25
1261
29
1234
24
14
1418
52
1311
25
1261
29
1234
24

 おすすめのAI支援プログラミングツール4選
Apr 22, 2024 pm 05:34 PM
おすすめのAI支援プログラミングツール4選
Apr 22, 2024 pm 05:34 PM
この AI 支援プログラミング ツールは、急速な AI 開発のこの段階において、多数の有用な AI 支援プログラミング ツールを発掘しました。 AI 支援プログラミング ツールは、開発効率を向上させ、コードの品質を向上させ、バグ率を減らすことができます。これらは、現代のソフトウェア開発プロセスにおける重要なアシスタントです。今日は Dayao が 4 つの AI 支援プログラミング ツールを紹介します (すべて C# 言語をサポートしています)。皆さんのお役に立てれば幸いです。 https://github.com/YSGStudyHards/DotNetGuide1.GitHubCopilotGitHubCopilot は、より少ない労力でより迅速にコードを作成できるようにする AI コーディング アシスタントであり、問題解決とコラボレーションにより集中できるようになります。ギット
 2か月後、人型ロボットWalker Sが服をたたむことができるようになった
Apr 03, 2024 am 08:01 AM
2か月後、人型ロボットWalker Sが服をたたむことができるようになった
Apr 03, 2024 am 08:01 AM
Machine Power Report 編集者: Wu Xin 国内版の人型ロボット + 大型模型チームは、衣服を折りたたむなどの複雑で柔軟な素材の操作タスクを初めて完了しました。 OpenAIのマルチモーダル大規模モデルを統合したFigure01の公開により、国内同業者の関連動向が注目を集めている。つい昨日、中国の「ヒューマノイドロボットのナンバーワン株」であるUBTECHは、Baidu Wenxinの大型モデルと深く統合されたヒューマノイドロボットWalkerSの最初のデモを公開し、いくつかの興味深い新機能を示した。 Baidu Wenxin の大規模モデル機能の恩恵を受けた WalkerS は次のようになります。 Figure01 と同様に、WalkerS は動き回るのではなく、机の後ろに立って一連のタスクを完了します。人間の命令に従って服をたたむことができる
 AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
産業オートメーション技術の分野では、人工知能 (AI) と Nvidia という無視できない 2 つの最近のホットスポットがあります。元のコンテンツの意味を変更したり、コンテンツを微調整したり、コンテンツを書き換えたり、続行しないでください。「それだけでなく、Nvidia はオリジナルのグラフィックス プロセッシング ユニット (GPU) に限定されていないため、この 2 つは密接に関連しています。」このテクノロジーはデジタル ツインの分野にまで広がり、新たな AI テクノロジーと密接に関係しています。「最近、NVIDIA は、Aveva、Rockwell Automation、Siemens などの大手産業オートメーション企業を含む多くの産業企業と提携に至りました。シュナイダーエレクトリック、Teradyne Robotics とその MiR および Universal Robots 企業も含まれます。最近、Nvidiahascoll
 柔軟かつ高速な 5 本の指を備え、人間のタスクを自律的に完了する初のロボットが登場、大型モデルが仮想空間トレーニングをサポート
Mar 11, 2024 pm 12:10 PM
柔軟かつ高速な 5 本の指を備え、人間のタスクを自律的に完了する初のロボットが登場、大型モデルが仮想空間トレーニングをサポート
Mar 11, 2024 pm 12:10 PM
今週、OpenAI、Microsoft、Bezos、Nvidiaが投資するロボット企業FigureAIは、7億ドル近くの資金調達を受け、来年中に自立歩行できる人型ロボットを開発する計画であると発表した。そしてテスラのオプティマスプライムには繰り返し良い知らせが届いている。今年が人型ロボットが爆発的に普及する年になることを疑う人はいないだろう。カナダに拠点を置くロボット企業 SanctuaryAI は、最近新しい人型ロボット Phoenix をリリースしました。当局者らは、多くのタスクを人間と同じ速度で自律的に完了できると主張している。人間のスピードでタスクを自律的に完了できる世界初のロボットである Pheonix は、各オブジェクトを優しくつかみ、動かし、左右にエレガントに配置することができます。自律的に物体を識別できる
 どのAIプログラマーが一番優れているでしょうか? Devin、Tongyi Lingma、SWE エージェントの可能性を探る
Apr 07, 2024 am 09:10 AM
どのAIプログラマーが一番優れているでしょうか? Devin、Tongyi Lingma、SWE エージェントの可能性を探る
Apr 07, 2024 am 09:10 AM
世界初の AI プログラマー Devin の誕生から 1 か月も経たない 2022 年 3 月 3 日、プリンストン大学の NLP チームはオープンソース AI プログラマー SWE-agent を開発しました。 GPT-4 モデルを利用して、GitHub リポジトリの問題を自動的に解決します。 SWE ベンチ テスト セットにおける SWE エージェントのパフォーマンスは Devin と同様で、平均 93 秒かかり、問題の 12.29% を解決しました。専用端末と対話することで、SWE エージェントはファイルの内容を開いて検索したり、自動構文チェックを使用したり、特定の行を編集したり、テストを作成して実行したりできます。 (注: 上記の内容は元の内容を若干調整したものですが、原文の重要な情報は保持されており、指定された文字数制限を超えていません。) SWE-A
 Go 言語を使用してモバイル アプリケーションを開発する方法を学ぶ
Mar 28, 2024 pm 10:00 PM
Go 言語を使用してモバイル アプリケーションを開発する方法を学ぶ
Mar 28, 2024 pm 10:00 PM
Go 言語開発モバイル アプリケーション チュートリアル モバイル アプリケーション市場が活況を続ける中、ますます多くの開発者が Go 言語を使用してモバイル アプリケーションを開発する方法を検討し始めています。シンプルで効率的なプログラミング言語として、Go 言語はモバイル アプリケーション開発でも大きな可能性を示しています。この記事では、Go 言語を使用してモバイル アプリケーションを開発する方法を詳しく紹介し、読者がすぐに始めて独自のモバイル アプリケーションの開発を開始できるように、具体的なコード例を添付します。 1. 準備 始める前に、開発環境とツールを準備する必要があります。頭
 Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
掃除ロボットやモップ拭きロボットは、近年消費者の間で最も人気のあるスマート家電製品の 1 つです。操作の利便性、あるいは操作の必要がないことで、怠け者は手を解放し、消費者は日常の家事から「解放」され、好きなことにもっと時間を費やすことができるようになり、生活の質が向上します。この流行に乗って、市場に出回っているほぼすべての家電ブランドが独自の掃除ロボットや拭き掃除ロボットを製造しており、掃除ロボット市場全体が非常に活発になっています。しかし、市場の急速な拡大は必然的に隠れた危険をもたらします。多くのメーカーがより多くの市場シェアを急速に占有するために機械の海戦術を使用し、その結果、アップグレードポイントのない多くの新製品が生まれるとも言われています。まさに「マトリョーシカ」モデルです。ただし、すべての掃除ロボットやモップロボットがそうであるわけではありません。
 未来を形作る 10 台の人型ロボット
Mar 22, 2024 pm 08:51 PM
未来を形作る 10 台の人型ロボット
Mar 22, 2024 pm 08:51 PM
以下の 10 種類の人型ロボットが私たちの未来を形作ります。 1. ASIMO: ホンダが開発した ASIMO は、最もよく知られている人型ロボットの 1 つです。身長 4 フィート、体重 119 ポンドの ASIMO には、高度なセンサーと人工知能機能が装備されており、複雑な環境をナビゲートし、人間と対話することができます。 ASIMO は多用途性を備えているため、障害を持つ人々の支援からイベントでのプレゼンテーションまで、さまざまなタスクに適しています。 2. Pepper: ソフトバンクロボティクスによって作成された Pepper は、人間の社会的パートナーになることを目指しています。表情豊かな顔と感情を認識する能力を備えた Pepper は、会話に参加したり、小売現場で手助けしたり、教育サポートを提供したりすることもできます。コショウ
