

強風にも耐えられるドローン?カリフォルニア工科大学は 12 分間の飛行データを使用して、ドローンに風に乗って飛行するよう教えています

#風が傘を飛ばすほど強いとき、ドローンは次のように安定します。
Windflying は一部です大きなレベルでは、風速は航空機の着陸時にパイロットに困難をもたらす可能性があり、小さなレベルでは、強風もドローンの飛行に影響を与えます。
現在、ドローンは無風の制御された条件下で飛行するか、人間がリモコンを使用して操作します。ドローンは研究者によって制御され、大空で編隊を組んで飛行しますが、これらの飛行は通常、理想的な条件と環境の下で行われます。
ただし、ドローンが荷物の配達など、必要ではあるが日常的なタスクを自律的に実行するには、風の状況にリアルタイムで適応できなければなりません。
風に吹かれて飛行する際のドローンの操縦性を向上させるために、カリフォルニア工科大学のエンジニアのチームは、ドローンの機敏性を維持できる人工知能ツールであるディープ ニューラル ネットワークである Neural-Fly を開発しました。いくつかの重要なパラメータを更新するだけで、ドローンが新しい未知の風況にリアルタイムで対応できるように、風の強い状況を調整します。
記事の冒頭で、UAV の耐風能力について最初に見てきました。以下に 4 ローター UAV を示します。この研究で開発されたツールの助けを借りて、最大風速 27 マイルで 8 の字シャトル操作を完了することができます。
風に乗って飛行するドローンを別の場所から観察角度:
ドローンがさまざまな風速の下で往復するためには、データが不可欠です。この研究では多くのデータは必要ありません。わずか 12 分で取得した飛行データ。Neural-Fly を搭載した自律型クアッドコプター ドローンは、強風への対応方法を学習しました。 「使用されるデータの量は非常に少ないです」とカリフォルニア工科大学航空宇宙学部の大学院生で論文著者の一人であるマイケル・オコンネル氏は言う。
この研究は水曜日、サイエンス・ロボティクス誌に掲載されました。
- 論文アドレス: https://www.science.org/doi/10.1126/scirobotics.abm6597
- arXiv アドレス: https://arxiv.org/pdf/2205.06908.pdf
Neural-Fly 実験訓練では、ドローンが飛行します。風 洞窟内を飛行する場合、風速は 6 段階あり、最も速いのは時速 13.4 マイルです。
このデータに基づいて、チームはディープ ニューラル ネットワークを作成し、同じ風洞内で航空機が巧みに操縦できるようにしました。 8 の字パターンでゲートを通過するか、2 つの楕円形のゲートを通過します。ドローンはテストでは訓練で経験したよりも速く飛行し、時速約44マイルでした。この論文の著者でカリフォルニア工科大学の大学院生であるGuanya Shi氏によると、これは風洞が発生させることができる最大風速だという。少量のデータしか必要としないことに加えて、このソフトウェアは安価なコンピューティング デバイスである Raspberry Pi 上でのみ実行されます。
特派員著者でカリフォルニア工科大学の航空宇宙、制御および動的システムの教授である Soon-Jo Chung 氏は、新しいシステムのドローン飛行を備えた既存の SOTA テクノロジーと比較したエラー率について述べました。パフォーマンスは 2.5 ~ 4 倍向上します。
下の写真は左から右にShi Guanya、Soon-Jo Chung、Michael O'Connellです。 Shi Guanya 氏が 2023 年 9 月にカーネギーメロン大学コンピューティング学部ロボット工学研究所に助教授として着任することは祝福に値します。
# 研究者らは、この技術は将来、ドローン配送や空飛ぶ自動車に使用されるだろうと述べています。
Neural-Fly テクノロジーの概要
無人航空機 (UAV) が持続的な商業化を達成するには、動的高速風下でも動作する必要があります。そして正確な飛行操縦が重要です。しかし、さまざまな風の状態とそれが UAV の操縦性に及ぼす影響との関係は詳しく研究されていないため、従来の制御設計手法を使用して効率的なロボット コントローラーを設計することは困難です。
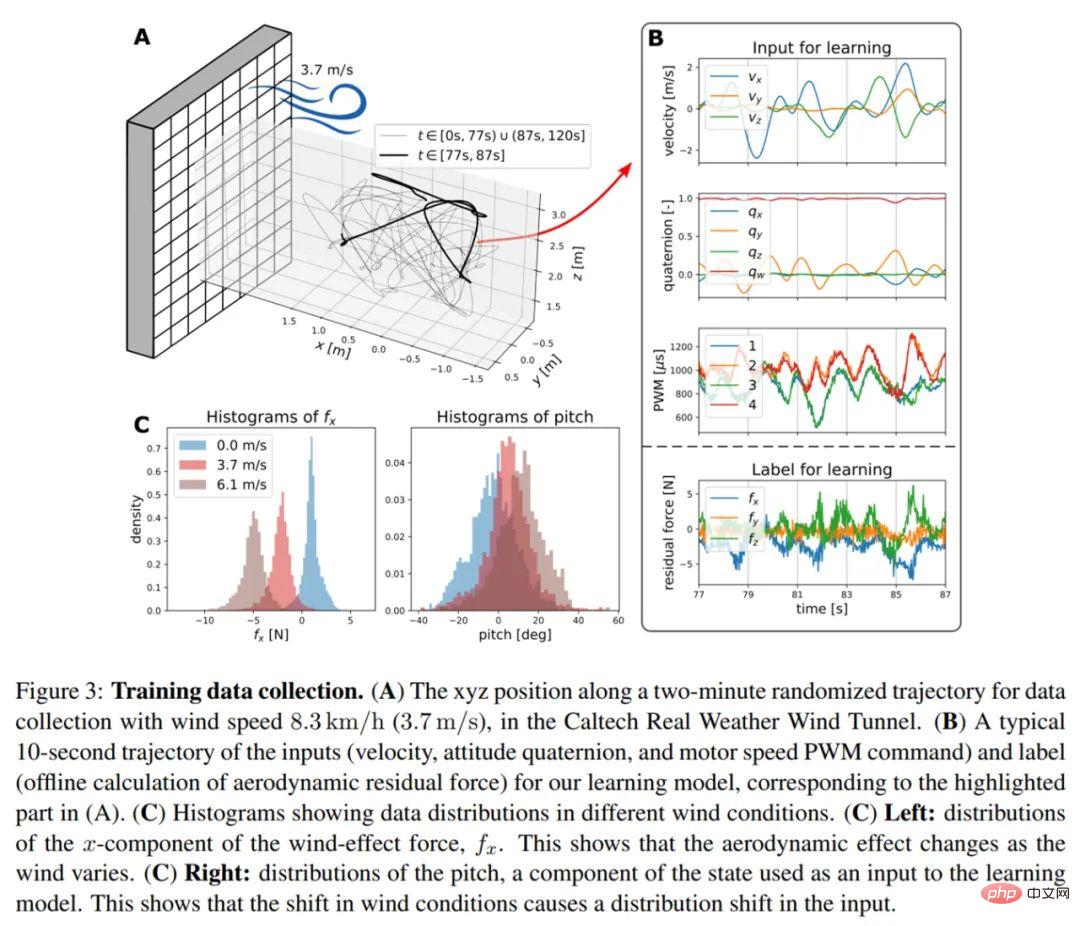
カリフォルニア工科大学の研究者によって提案された「Neural-Fly」は、深層学習に基づく軌道追跡コントローラーとして機能し、急速に変化する風の状況に素早く適応する方法を学習できるデータ駆動型の手法です。以下の図 3(A) はデータ収集プロセスを示し、図 3(B) は風速 13.3km/h (3.7m/s) でのトレーニング データの入力とラベルを示し、図 3(C) は入力データと異なる風況でのラベル付け ラベル付けされたデータの分布
オンライン アダプティブ オフライン メタ学習
下の図 2 は、Neural-Fly の概要です。適応飛行制御と深層学習ベースのロボット制御が進歩したことを示すメソッド。 Neural-Fly は、標準的な UAV の動的な風の条件下で、柔軟で困難な軌道を実現するセンチメートルレベルの位置誤差追跡を可能にします。具体的には、この方法は主に オフライン学習段階とリアルタイムオンライン学習のためのオンライン適応制御段階の 2 つの部分で構成されます。
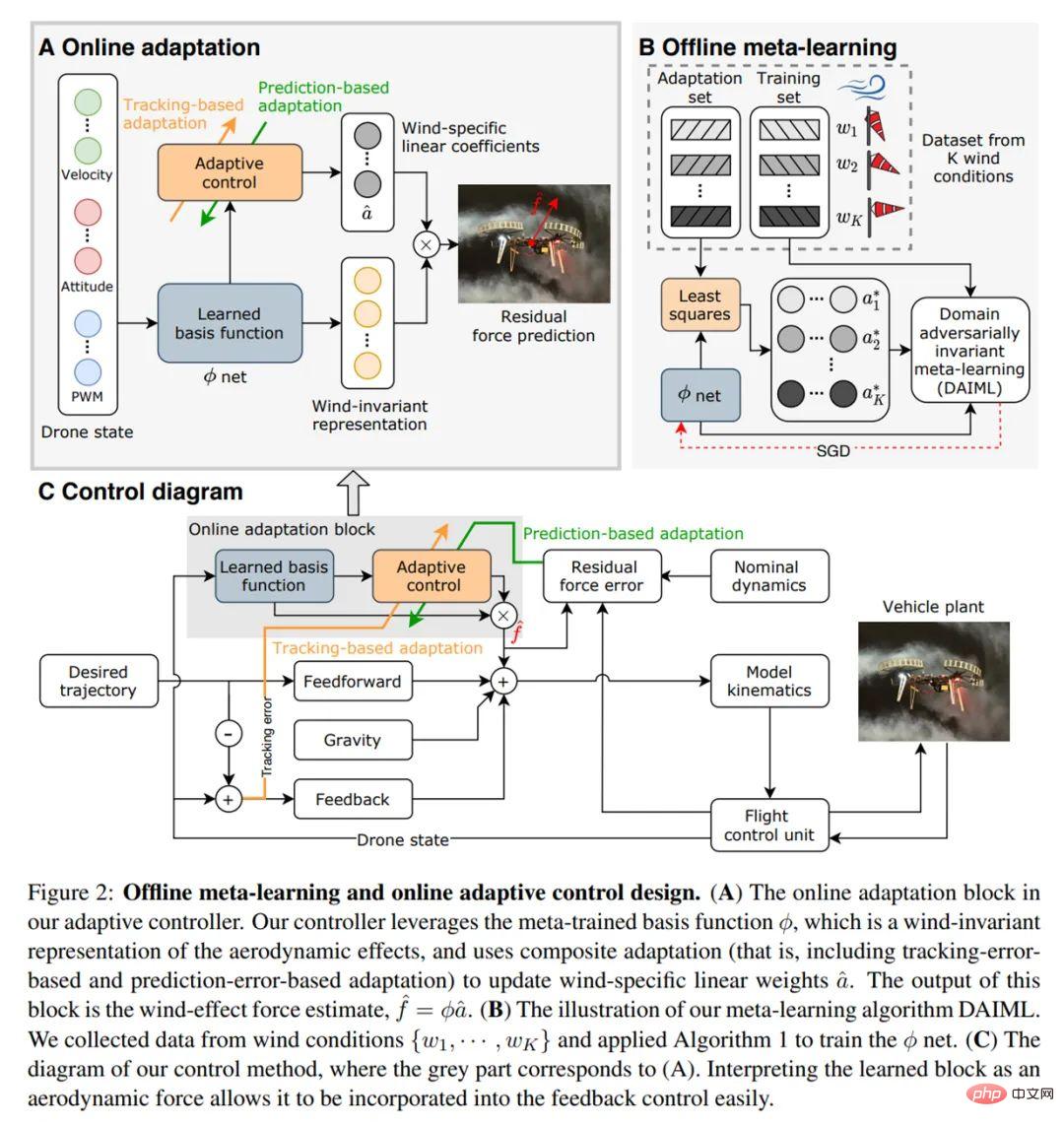
オフライン学習段階のために、研究者たちは空気力学的風を学習するドメイン敵対的不変メタ学習(DAIML)を開発しました。 -データ効率の高い方法での独立したディープ ニューラル ネットワーク (DNN) 表現。この表現は、ハイブリッド ディープ ニューラル ネットワークによって出力される線形係数のセットを更新することで、さまざまな風の状態に適応します。
DAIML はデータ効率も高く、ディープ ニューラル ネットワークをトレーニングするために 6 つの異なる風況下で合計 12 分間の飛行データのみを使用します。 DAIML には、データ効率を向上させるだけでなく、下流のオンライン適応制御ステージからも情報を提供できるいくつかの重要な機能が含まれています。
DAIML はスペクトル正規化を使用してディープ ニューラル ネットワークのリプシッツ特性を制御し、目に見えないデータへの汎化を改善し、閉ループの安定性と堅牢性を提供していることは注目に値します。さらに、DAIML は識別ネットワークを使用して、学習された表現が風によって不変であること、および風関連情報がオンライン制御段階に適応される線形係数にのみ含まれることを保証します。
オンライン適応制御ステージでは、研究者らは、学習された表現が閉ループ制御とどのように相互作用するかに基づいた、正規化された複合適応制御則を開発しました。これはシステム相互作用の基本的な理解に基づいて作成されており、厳密な理論的サポートが備わっています。
具体的には、適応則では、位置追跡誤差項と空力予測誤差項の組み合わせを使用して、風に関連する線形係数を更新します。このアプローチは、あらゆる風の条件に対する安定した迅速な適応と、不完全な学習に対する堅牢性を効果的に保証します。この適応制御則は多くの学習済みモデルで使用できますが、DAIML から学習した正確な表現は適応速度のさらなる向上に役立ちます。
実験結果
Neural-Fly の効果に関しては、非線形トラッキング コントローラーよりも平均で 66% 優れており、適応コントローラは 42% 改善されており、インクリメンタル非線形動的反転 (INDI) コントローラより 35% 高いため、L_1 よりも優れています。これらの結果はすべて、PX4 のデフォルトの調整された姿勢制御を実行しながら、標準的なクアッドコプター ドローン ハードウェアを使用して達成されました。
外部の風の干渉がなく、より複雑なハードウェア (10 倍の制御周波数を必要とし、DC モーター速度フィードバックを使用するオンボード光センサーなど) を使用する関連作業と比較しても、Neural - The Fly のトラッキング性能も競争力があります。
以下の表 1 は、さまざまな風の条件下でのさまざまな方法のエラー追跡統計を示しています。
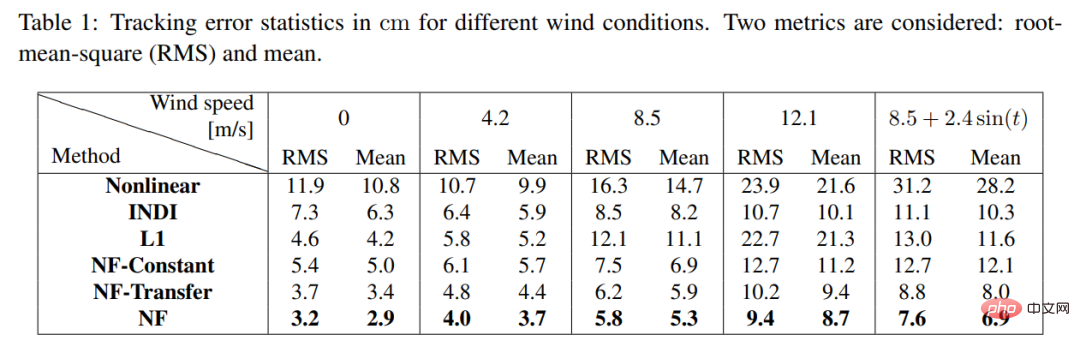
研究者らは、Neural-Fly を 2 つの亜種、Neural-Fly-Transfer および Neural-Fly-Constant と比較しました。その中で、NF-Transfer はさまざまなドローンからのデータのトレーニングから学習した表現を使用しますが、NF-Constant は自明な非学習根拠を持つ適応制御則のみを使用します。
Neural-Fly-Transfer は、UAV 構成の変更やモデルの不一致に対する堅牢性を実証し、NF-Constant、L_1、および INDI メソッドはすべて、基礎となる物理構造を仮定することなく、未知のダイナミクスに直接適応します。 、同様のパフォーマンスを持っています。
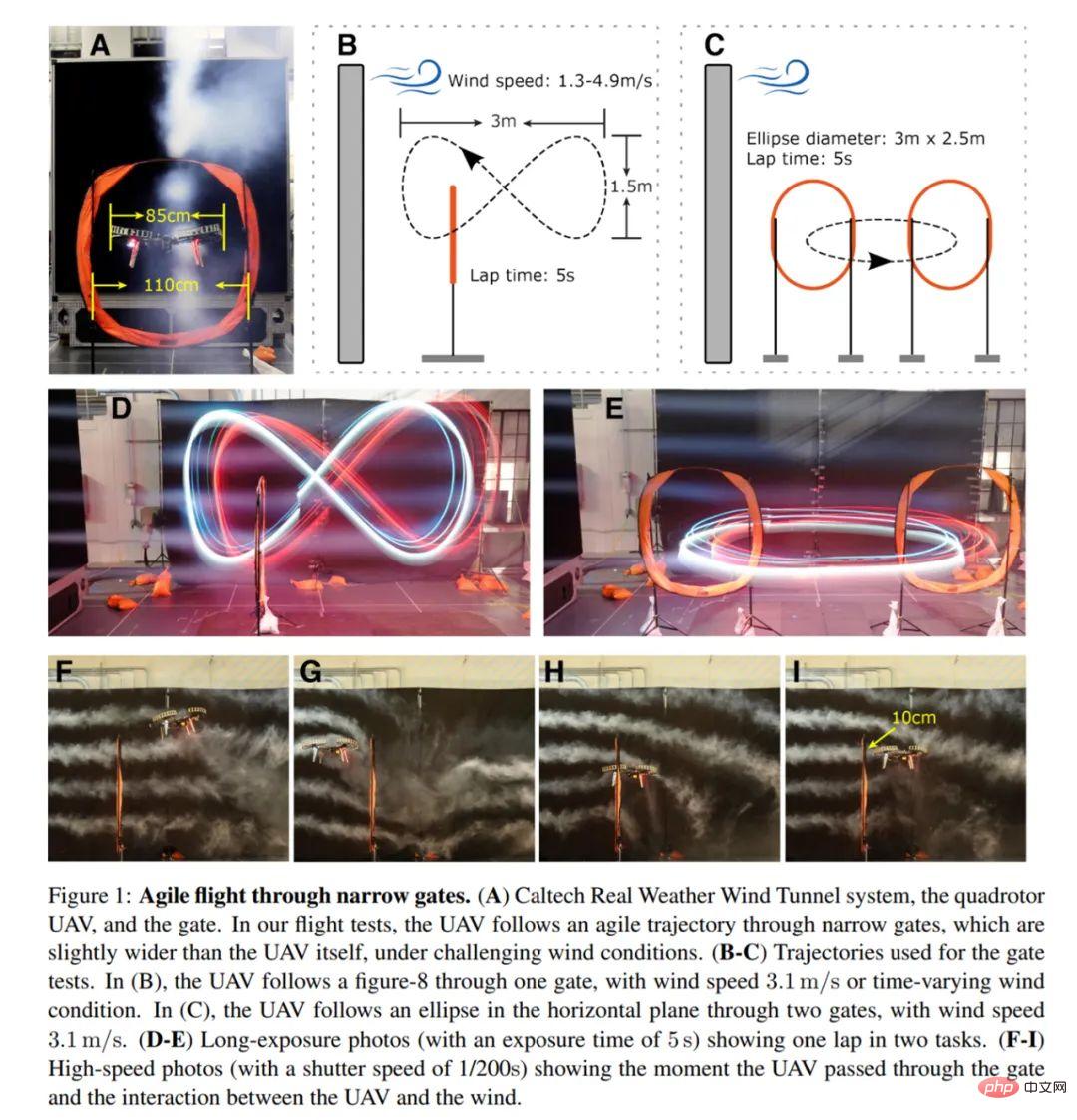
最後に、研究者らは Neural-Fly が一連の機能を実装できることを証明し、ドローンが軌道に従い、強風の状況下でも低空のドアを機敏に通過できるようにしました。以下の図 1 に示されています。
以上が強風にも耐えられるドローン?カリフォルニア工科大学は 12 分間の飛行データを使用して、ドローンに風に乗って飛行するよう教えていますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7494
7494
 15
1377
52
77
11
19
50
15
1377
52
77
11
19
50

 Bytedance Cutting が SVIP スーパー メンバーシップを開始: 継続的な年間サブスクリプションは 499 元で、さまざまな AI 機能を提供
Jun 28, 2024 am 03:51 AM
Bytedance Cutting が SVIP スーパー メンバーシップを開始: 継続的な年間サブスクリプションは 499 元で、さまざまな AI 機能を提供
Jun 28, 2024 am 03:51 AM
このサイトは6月27日、JianyingはByteDanceの子会社であるFaceMeng Technologyによって開発されたビデオ編集ソフトウェアであり、Douyinプラットフォームに依存しており、基本的にプラットフォームのユーザー向けに短いビデオコンテンツを作成すると報告しました。 Windows、MacOS、その他のオペレーティング システム。 Jianyingは会員システムのアップグレードを正式に発表し、インテリジェント翻訳、インテリジェントハイライト、インテリジェントパッケージング、デジタルヒューマン合成などのさまざまなAIブラックテクノロジーを含む新しいSVIPを開始しました。価格的には、クリッピングSVIPの月額料金は79元、年会費は599元(当サイト注:月額49.9元に相当)、継続月額サブスクリプションは月額59元、継続年間サブスクリプションは、年間499元(月額41.6元に相当)です。さらに、カット担当者は、ユーザーエクスペリエンスを向上させるために、オリジナルのVIPに登録している人は、
 Rag と Sem-Rag を使用したコンテキスト拡張 AI コーディング アシスタント
Jun 10, 2024 am 11:08 AM
Rag と Sem-Rag を使用したコンテキスト拡張 AI コーディング アシスタント
Jun 10, 2024 am 11:08 AM
検索強化生成およびセマンティック メモリを AI コーディング アシスタントに組み込むことで、開発者の生産性、効率、精度を向上させます。 JanakiramMSV 著者の EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG から翻訳。基本的な AI プログラミング アシスタントは当然役に立ちますが、ソフトウェア言語とソフトウェア作成の最も一般的なパターンに関する一般的な理解に依存しているため、最も適切で正しいコードの提案を提供できないことがよくあります。これらのコーディング アシスタントによって生成されたコードは、彼らが解決する責任を負っている問題の解決には適していますが、多くの場合、個々のチームのコーディング標準、規約、スタイルには準拠していません。これにより、コードがアプリケーションに受け入れられるように修正または調整する必要がある提案が得られることがよくあります。
 国産最大の無人輸送機が初飛行に成功 中国航空工程集団のAEP100-Aエンジン搭載
Aug 23, 2024 am 07:32 AM
国産最大の無人輸送機が初飛行に成功 中国航空工程集団のAEP100-Aエンジン搭載
Aug 23, 2024 am 07:32 AM
8月22日の当サイトのニュースによると、中国航空動力集団有限公司は本日6時28分、中国航空工業が完全に独自に開発した900キロワットのターボプロップエンジンAEP100-Aを正式発表した。社、陝西省で大型無人輸送機SA750Uの初飛行に成功。報道によると、AEP100-Aターボプロップエンジンは中国航空宇宙工学研究院によって設計され、韓国で製造されており、3次元の空力設計とユニット設計技術を使用して高温や平地に適応する能力を備えています。燃費を向上させながら、航空機の全体的な運用効率を向上させます。 AEP100ターボプロップエンジンシリーズは、2~6トンの汎用航空機や3~10トンの無人航空機に搭載可能であり、その総合性能は現在運用されているものと同レベルの国際先進レベルに達しています。このサイトが以前に報告した
 微調整によって本当に LLM が新しいことを学習できるようになるのでしょうか: 新しい知識を導入すると、モデルがより多くの幻覚を生成する可能性があります
Jun 11, 2024 pm 03:57 PM
微調整によって本当に LLM が新しいことを学習できるようになるのでしょうか: 新しい知識を導入すると、モデルがより多くの幻覚を生成する可能性があります
Jun 11, 2024 pm 03:57 PM
大規模言語モデル (LLM) は巨大なテキスト データベースでトレーニングされ、そこで大量の現実世界の知識を取得します。この知識はパラメータに組み込まれており、必要なときに使用できます。これらのモデルの知識は、トレーニングの終了時に「具体化」されます。事前トレーニングの終了時に、モデルは実際に学習を停止します。モデルを調整または微調整して、この知識を活用し、ユーザーの質問により自然に応答する方法を学びます。ただし、モデルの知識だけでは不十分な場合があり、モデルは RAG を通じて外部コンテンツにアクセスできますが、微調整を通じてモデルを新しいドメインに適応させることが有益であると考えられます。この微調整は、ヒューマン アノテーターまたは他の LLM 作成物からの入力を使用して実行され、モデルは追加の実世界の知識に遭遇し、それを統合します。
 新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
編集者 |ScienceAI 質問応答 (QA) データセットは、自然言語処理 (NLP) 研究を促進する上で重要な役割を果たします。高品質の QA データ セットは、モデルの微調整に使用できるだけでなく、大規模言語モデル (LLM) の機能、特に科学的知識を理解し推論する能力を効果的に評価することもできます。現在、医学、化学、生物学、その他の分野をカバーする多くの科学 QA データ セットがありますが、これらのデータ セットにはまだいくつかの欠点があります。まず、データ形式は比較的単純で、そのほとんどが多肢選択式の質問であり、評価は簡単ですが、モデルの回答選択範囲が制限され、科学的な質問に回答するモデルの能力を完全にテストすることはできません。対照的に、自由回答型の Q&A
 SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
編集者 | KX 医薬品の研究開発の分野では、タンパク質とリガンドの結合親和性を正確かつ効果的に予測することが、医薬品のスクリーニングと最適化にとって重要です。しかし、現在の研究では、タンパク質とリガンドの相互作用における分子表面情報の重要な役割が考慮されていません。これに基づいて、アモイ大学の研究者らは、初めてタンパク質の表面、3D 構造、配列に関する情報を組み合わせ、クロスアテンション メカニズムを使用して異なるモダリティの特徴を比較する、新しいマルチモーダル特徴抽出 (MFE) フレームワークを提案しました。アライメント。実験結果は、この方法がタンパク質-リガンド結合親和性の予測において最先端の性能を達成することを実証しています。さらに、アブレーション研究は、この枠組み内でのタンパク質表面情報と多峰性特徴の位置合わせの有効性と必要性を実証しています。 「S」で始まる関連研究
 我が国初の積載量3トンを超える大型無人輸送機「SA750U」が国産システムと資材で初飛行に成功
Aug 23, 2024 am 07:31 AM
我が国初の積載量3トンを超える大型無人輸送機「SA750U」が国産システムと資材で初飛行に成功
Aug 23, 2024 am 07:31 AM
8月22日の当サイトのニュースによると、「山和華宇」の公式公式アカウントによると、本日6時28分、サンワード華宇航空技術が独自に開発し、サンワードスターの戦略調整により完成した大型無人輸送機SA750Uが完成した。航空会社は西安市京辺から飛行し、実験用ドローン試験センターが初飛行に成功した。 ▲写真出典「山河華宇」公式公式アカウント、以下同 報道によると、40分間の飛行試験中、機体のすべてのシステム機器は正常に動作し、機体の姿勢は安定していたという。性能は設計仕様を満たし、予定された飛行課題を完了した後、飛行機は順調に帰還し、最初の飛行は完全に成功した。 SA750Uは、荷重3トンを超える我が国初の大型無人輸送機であり、山和華宇会社はコンセプト設計から初号機の初飛行成功までの全過程をわずか2年8か月で完了した。
 AIなどの市場を開拓するグローバルファウンドリーズがタゴール・テクノロジーの窒化ガリウム技術と関連チームを買収
Jul 15, 2024 pm 12:21 PM
AIなどの市場を開拓するグローバルファウンドリーズがタゴール・テクノロジーの窒化ガリウム技術と関連チームを買収
Jul 15, 2024 pm 12:21 PM
7月5日のこのウェブサイトのニュースによると、グローバルファウンドリーズは今年7月1日にプレスリリースを発行し、自動車とインターネットでの市場シェア拡大を目指してタゴール・テクノロジーのパワー窒化ガリウム(GaN)技術と知的財産ポートフォリオを買収したことを発表した。モノと人工知能データセンターのアプリケーション分野で、より高い効率とより優れたパフォーマンスを探求します。生成 AI などのテクノロジーがデジタル世界で発展を続ける中、窒化ガリウム (GaN) は、特にデータセンターにおいて、持続可能で効率的な電力管理のための重要なソリューションとなっています。このウェブサイトは、この買収中にタゴール・テクノロジーのエンジニアリングチームがGLOBALFOUNDRIESに加わり、窒化ガリウム技術をさらに開発するという公式発表を引用した。 G
